11242705
относится к измерив машиностроении, а вам контроля зубча
по ко
дл ем ге ус из ре ра на ка
Известно устройство для поэлементного контроля зубчатых колес, состоящее из основания, на котором расположены суппорт и колонка, поддерживающая сектор с центрами для установки контролируемых зубчатых колес. Суппорт состоит из двух отдельных плит и винтовой колонки, поддерживающей измерительньй узел. Последний при настройке можно перемещать в продольном, поперечном и вертикальном направлениях. Измерительный узел состоит из ряда сменных измерительных головок, уста- навливаемых на каретке, которая легко передвигается на шариковых направляющих . Измерительные наконечники устанавливаются в специальные держатели измерительных головок.Для предотвращения поворота контролируемого колеса в процессе измерения его на устройстве предусмотрен специальный фиксатор. Контакт измерительных наконечников устройства с бковыми поверхностями зубьев контролруемого колеса и измерительное усилие обеспечивается грузом lj.
Недостатком этого устройства является низкая производительность котроля, обусловленная необходимостью замены измерительных головок при контроле разных элементных показателей, а также отсутствием автоматического режима измерения.
Наиболее близким к изобретению является устройство для поэлементного контроля зубчатьгх колес, содержащее основание, установленные на нем суппорт для базирования контролируемых колес, механизм позициони- Iования контролируемых колес, выполненный в виде вала с закрепленньа и на нем двумя оптическими делительными дисками с считывающими фотоэлементами, приводом и электромагнитным тормозом, стойку и см онтиро- ваннуга на последней измерительную каретку с направляющими, установленные на этих направляю1цих два измерительных наконечника и соединенные с ними преобразователи линейных перемещений, выходы которых подключаются к входу ЭВМ, Это. устройство
)
5
0
5
0
5
0
5
позволяет контролировать зубчатые колеса в автоматическом режиме Г 2.
Однако в известном устройстве для измерения параметров, определяемых у контролируемого колеса в тангенциальном направлении, требуется установка и настройка тангенциальной измерительной каретки, а для измерения параметров, определяемых в радиальном направлении, установка и настройка радиальной измерительной каретки. Эти операции приводят к
потере производит,ельности прибора.
f
Кроме ТОГО), за один установ контролируемого колеса в течение одного оборота может быть проконтролирован только один элементный показатель, причем на одном из профилей зубьев, правом или левом. Измерение кинематического и геометрического эксцентриситетов контролируемых зубчатых колес на известном устройстве не реализуется.
Цепь изобретения - обеспечение раздельного контроля геометрического и кинематического эксцентриситетов зубчатых колес и повышение производительности контроля,
Указанная цель достигается тем. что устройство для поэлементного контроля зубчатых колес, содержащее основание, установленные на нем суппорт для: базирования контролируемых колес, механизм позиционирования контролируемых колес, стойку и смонтированную на последней измерительную каретку с направляющими, установленные на этих направляющих два измерительных наконечника и соединенные с ними два преобразователя линейных перемещений, выходы которых подключаются к входу ЭВМ, снабжено третьим измерительным наконечником и связанным с ним третьим преобразователем линейных перемещений, выход которого соединяется с входом ЭВМ, третий наконечник выполнен в виде зуба рейки исходного контура и жестко закреплен на измерительной каретке в одной плоскости с первым и вторым измерительными наконечниками, направляющие измерительной каретки расположены под углом друг к другу и симметрично относительно третьего наконечника, механизм позиционирования выполнен в виде подпружиненной каретки, установленного
на последней пантографа и связанного с ними кривошипного привода.
Кроме того, устройство снабжено седловидным наконечником для захвата зуба контролируемого колеса, закрепленным на одном из звеньев пантографа, противоположное звено которого выполнено в виде рамки, охватывающей кривошип привода.
При этом кривошип привода выполнен в виде ползуна, разжимной втулки, охватывающей ползун, и ролика.
закрепленного на последнем и взаимодействующего с рамкой;
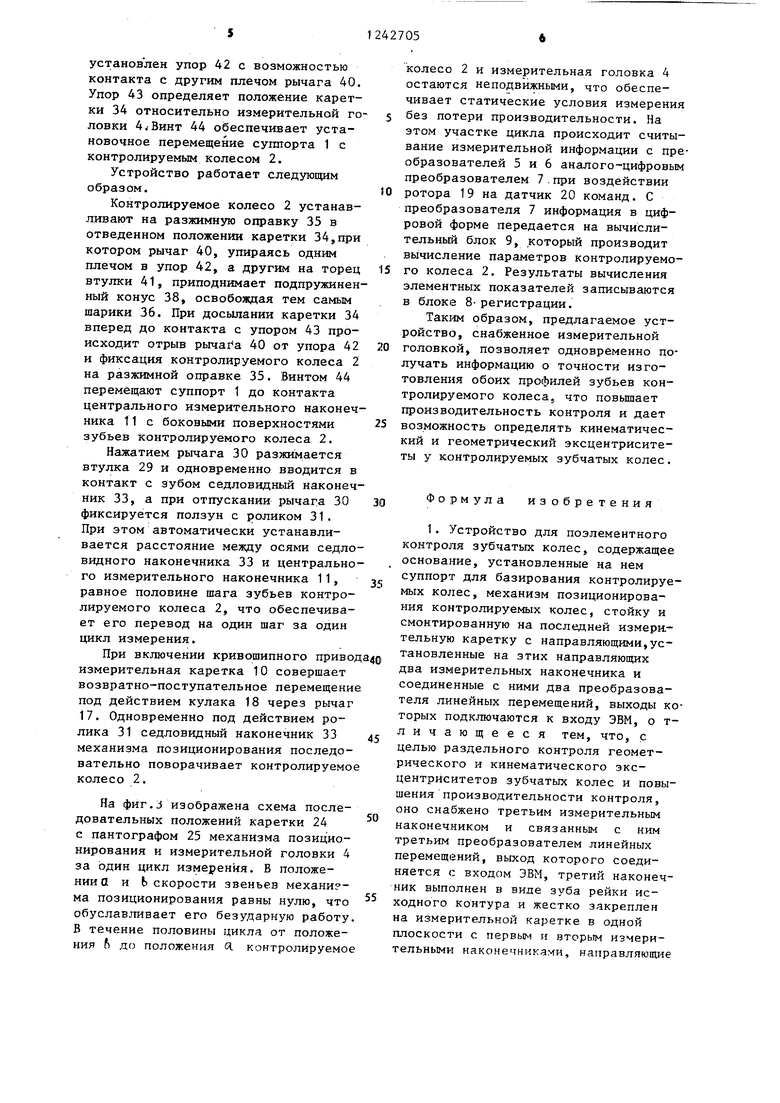
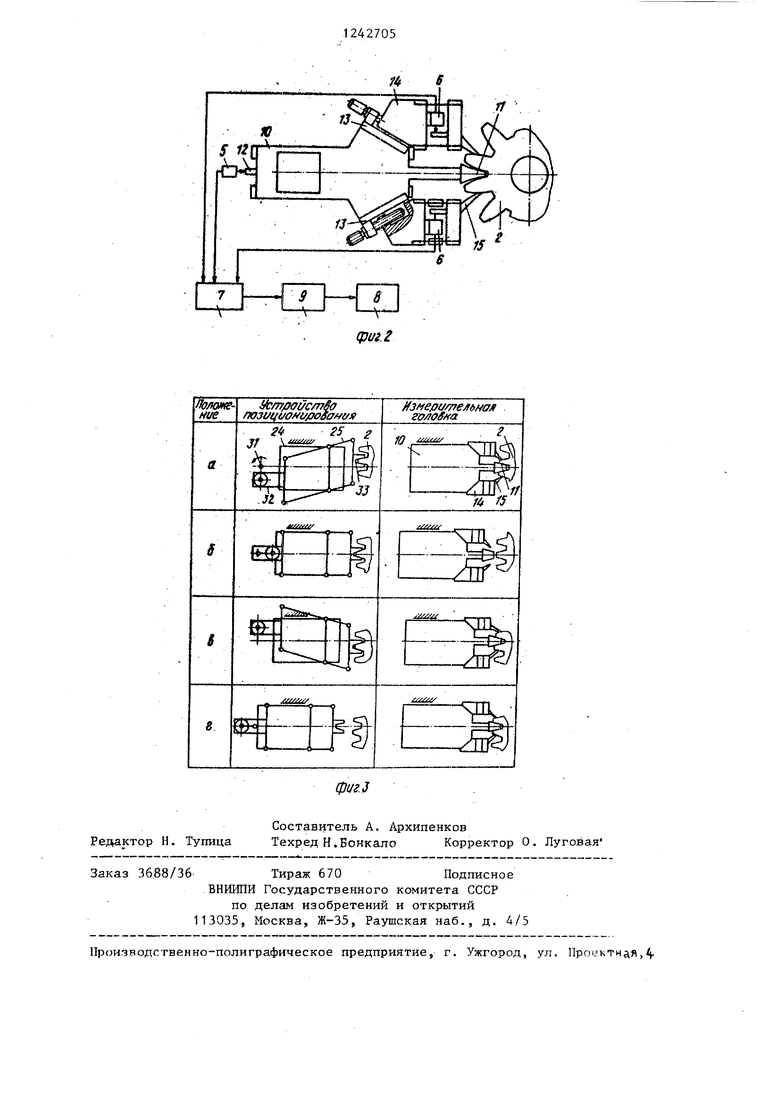
На фиг.1 изображено предлагаемое ус тройств о, общий вид, в разрезе j на фиг. 2 - измерительная головка устройства и его электрическая блок-схема; на фиг.З - последовательность положений механизма позиционирования и измерительной каретки за один цикл измерения.
Устройство.содержит суппорт 1 для установки контролируемого зубчатого колеса 2, стойку 3, измерительную головку 4 с преобразователями 5 и 6 линейных перемещений для оценки радиального биения контролируемого колеса 2 и оценки отклонения шагов по левому и правому профилям и подключаемых к входу ЭВМ, состоящей из аналого-цифрового преобразователя 7, блока 8 регистрации и вычислительного блока 9, электрически связанных между собой. Измерительная головка 4 состоит из подвижной в радиальном направлении измерительной каретки 10 с жестко закрепленными на ней центральным измерительным наконечником 11, выполненным по форме в виде зуба рейки исходного контура, и с пяткой 12, контактирующей с преобразователем 5 линейных перемещений.
Боковые поверхности измерительной каретки 10 выполнены в виде пря молинейных направляющих 13 для установочного перемещения оснований измерительных плоскопружинных параллелограммов 14, на подвижных частях которых закреплены боковые измерительные наконечники 15. На основания параллелограммов 14 зафиксированы преобразователи 6.
Направляющие 13 установлены параллельно геометрическому месту точек контакта боковых измерительных наконечников 15 с профилями соседних зубьев контролируемого колеса 2.
-
2427054
. Эти точки для зубчатых колес разных модулей расположены на прямой, проходящей через вершину треугольника исходного контура, центрального из- 5 мерительного наконечника 11, Пружина 16 осуществляет силовое замыкание измерительной каретки 10 на одно плечо рычага 17, другое плечо которого упирается в кулак 18 радиаль10 ного перемещения измерительной головки 4.- Кулак 18 и ротор 19 импульсного датчика 20 команд на аналого- цифровой преобразователь 7 жестко зафиксированы на ьалу 21, связанном
15 через зубчатую передачу 22 с ведущим валом 23.
Механизм позиционирования выполнен в виде подпружиненной каретки 24, установленного на ней пантогра20 фа 25 и связанного с ними кривошипного привода.
х
30
35
Кривошипный привод состоит из установленного на ведущем валу 23 25 водила 26 с четырьмя пальцами маль- тийского механизма. Ведомым звеном водила 26 является четырехлопаст- ный мальтийский крест 27, связанньй через зубчатую передачу 28 с валом, конец которого выполнен в виде разжимной втулки 29, работающей от рычага 30.
В разжимной втулке 29 зажат ползун с роликом 31, имеющий возможность перемещаться при настройке во втулке 29, разжатой рычагом 30.
Ролик 31 сопряжен с рамкой 32 пантографа 25, установленного на подпружиненной каретке 24 механизма позиционирования. На пантографе 25 также закреплен транспортный седловидный наконечник 33 для захвата зуба контролируемого колеса 2,соседнего со впадиной, в которую входит центральный измерительный на- конечник 11.
На направляющих суппорта 1 (не показаны) подвижно установлена каретка 34, несущая разжимную шариковую оправку 35. Шарики 36 находятся в контакте с образующими неподвижного конуса 37 и подвижного подпружиненного конуса 38 и служат для фиксации контролируемого колеса 2 по базовому отверстию. Сферическая пят- 55 ка 39 подвижного конуса 38 упирается в плечо грибовидного рычага 40,уста- ;новленного в отверстии ;втулки 41 с зазором. На суппорте 1 также
40
50
установлен упор 42 с возможностью контакта с другим плечом рычага 40. Упор 43 определяет положение каретки 34 относительно измерительной го- ловки 44 обеспечивает установочное перемещение суппорта 1 с контролируемым колесом 2.
Устройство работает следующим образом.
Контролируемое колесо 2 устанавливают на разжимную оправку 35 в отведенном положении каретки 34,при котором рычаг 40, упираясь одним плечом в упор 42, а другим на торец втулки 41, приподнимает подпружиненный конус 38, освобождая тем самым шарики 36. При досылании каретки 34 вперед до контакта с упором 43 происходит отрыв рычага 40 от упора 42 и фиксация контролируемого колеса 2 на разжимной оправке 35. Винтом 44 перемещают суппорт 1 до контакта центрального измерительного наконечника 11 с боковыми поверхностями зубьев контролируемого колеса 2.
Нажатием рычага 30 разлсимается втулка 29 и одновременно вводится в контакт с зубом седловидный наконечник 33, а при отпускании рычага 30 фиксируется ползун с роликом 31. При этом автоматически устанавливается расстояние между осями седловидного наконечника 33 и центрального измерительного наконечника 11, равное половине шага зубьев контролируемого колеса 2, что обеспечивает его перевод на один шаг за один цикл измерения.
При включении кривошипного привод измерительная каретка 10 совершает возвратно-поступательное перемещение под действием кулака 18 через рычаг 17. Одновременно под действием ролика 31 седловидный наконечник 33 механизма позиционирования последовательно поворачивает контролируемое колесо 2.
На фиг.J изображена схема последовательных положений каретки 24 с пантографом 25 механизма позиционирования и измерительной головки 4 за один цикл измерения. В положении fl и Ь скорости звеньев механи - ма позиционирования равны нулю, что обуславливает его безударную работу, В течение половины цикла от положения f до положения Я контролируемое
колесо 2 и измерительная головка 4 остаются неподвижными, что обеспечивает статические условия измерения без потери производительности. На этом участке цикла происходит считывание измерительной информации с преобразователей 5 и 6 аналого-цифровым преобразователем 7.при воздействии ротора 19 на датчик 20 команд. С преобразователя 7 информация в цифровой форме передается на вычислительный блок 9, который производит вычисление параметров контролируемого колеса 2. Результаты вычисления элементных показателей записываются в блоке 8-регистрации.
образом, предлагаемое устройство, снабженное измерительной головкой, позволяет одновременно получать информацию о точности изготовления обоих профилей зубьев контролируемого колеса, что повьштает производительность контроля и дает возможность определять кинематический и геометрический эксцентриситеты у контролируемых зубчатых колес.
Формула изобретения
1. Устройство для поэлементного контроля зубчатых колес, содержащее основание, установленные на нем суппорт для базирования контролируемых колес, механизм позиционирования контролируемых колес, стойку и смонтированную на последней измерительную каретку с направляющими,установленные на этих направляющих два измерительных наконечника и соединенные с ними два преобразователя линейных перемещений, выходы кторых подключаются к входу ЭВМ, о т личающееся тем, что, с целью раздельного контроля геометрического и кинематического эксцентриситетов зубчатых колес и повышения производительности контроля, оно снабжено третьим измерительным наконечником и связанным с ним третьим преобразователем линейных перемещений, выход которого соединяется с входом ЭВМ, третий наконечник выполнен в виде зуба рейки исходного контура и жестко закреплен на измерительной каретке в одной плоскости с первым и вторым измерительными наконечниками, направляющие
измерительной каретки расположены по углом друг к другу и симметрично относительно третьего наконечника, механизм позиционирования выполнен в виде подпружиненной каретки, установленного на последней пантографа и связанного с ними кривошипного привода.
2. Устройство по п.1, о т л и- ч ajo щ е е с я тем, что оно снабжено седловидным наконечником для
захвата зуба.контролируемого колеса, закрепленным на одном из звеньев пантографа, противоположное звено которого выполнено в виде рамки, охватывающей кривошип привода.
3. Устройство по пп. 1 и 2, о т- личающееся тем, что кривошип привода выполнен в виде ползуна, разжимной втулки,охватывающей ПОР зун, и ролика, закрепленного на последнем и взаимодействующего с рамкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения радиального биения зубчатых колес и устройство для его осуществления | 1987 |
|
SU1495638A1 |
| Устройство для контроля профиля зуба | 1988 |
|
SU1627812A1 |
| Устройство для контроля накопленной погрешности обрабатываемых зубчатых колес | 1981 |
|
SU1013731A1 |
| Станок для обработки зубчатых колес | 1990 |
|
SU1759573A1 |
| Прибор для воспроизведения кривых | 1990 |
|
SU1805062A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Устройство для дуговой сваркиС КОлЕбАНияМи элЕКТРОдА | 1977 |
|
SU795809A1 |
| ТЕПЛОВОЙ РОТОРНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2564366C2 |
| Прибор для контроля изделий с винтовой поверхностью | 1984 |
|
SU1245858A1 |
| Зубодолбежный станок | 1986 |
|
SU1400810A1 |
Изобретение относится к мапш- ностроению, а именно к средства контроля зубчатых колес. Цель изобретения - разделение контроля геометрического и кинематического эксцентриситетов зубчатых колес и повышение производительности контрол я за счет обеспечения возможности контролировать за один цикл измерения двух параметров. Для этого в устройство введен третий наконечник, кинематически связанный с измерительным преобразователем и установленный на одном из звеньев пантографа. А кривошип выполнен в виде ползуна и разжимной втулки. При работе устройства два наконечника измеряют кинематический эксцентриситет, а третий - геометрический. Результаты измерений обрабатываются ЭВМ. 2 з.п. ф-лы, 3 ил. с (Л tc 4)1 KND vi
30
.20
4 /
фиг.1
п s
ГЗ
S Щ h
13
UofloiKe- Ht/e
yc/nfюйc/r So no3umfOf t/flooa i/s
Измере/телмал eo offfs
.3i
Ю M.fff
JJ
ITfS
S
Редактор H. Тупица
фиг.;}.Составитель A. Архипенков
Техред Н.Бонкало Корректор О. Луговая
Заказ 36.88/36- Тираж 670Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Л.: Машиностроение, 1968, с | |||
| Способ укрепления под покрышкой пневматической шины предохранительного слоя или манжеты | 1917 |
|
SU185A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Двигатель внутреннего горения | 1921 |
|
SU450A1 |
