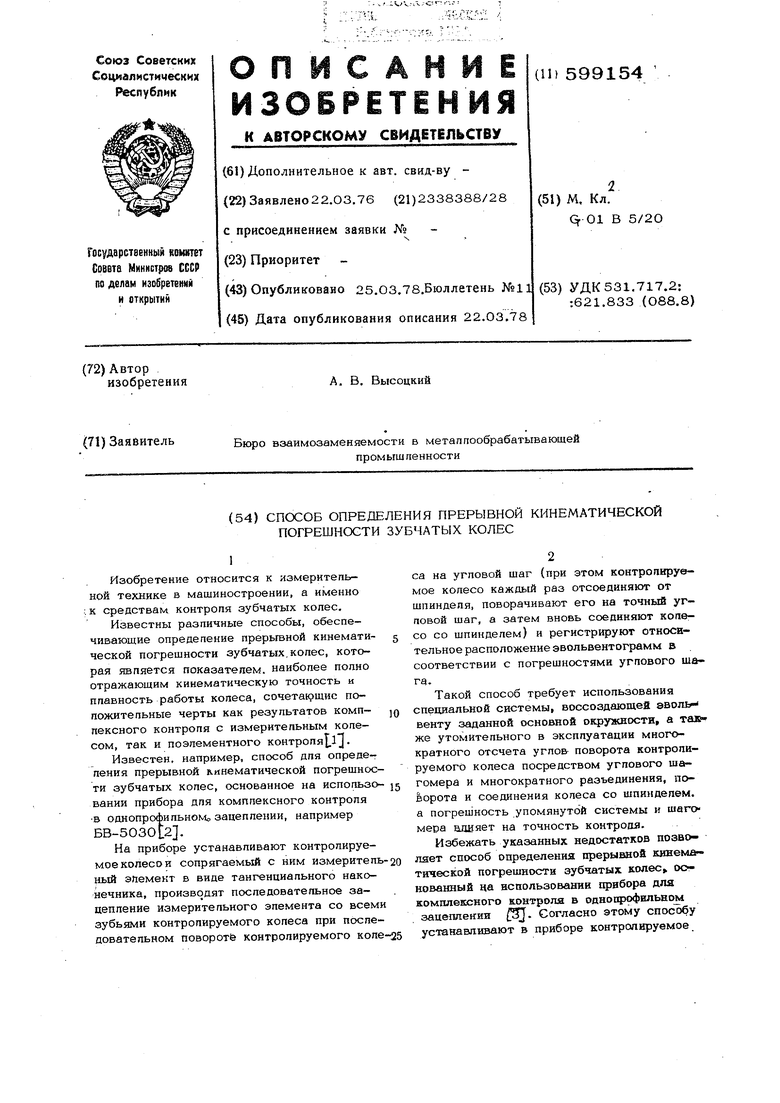
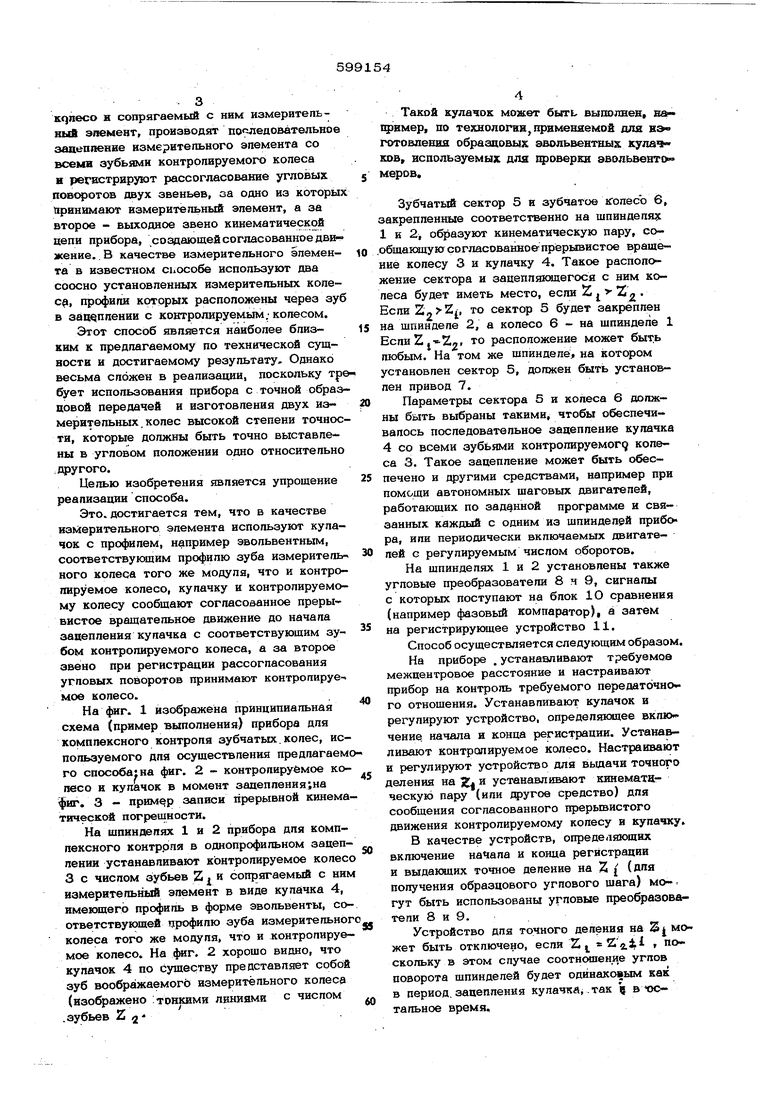
Kqneco и сопрягаемый с ним измерительный эпемеат, производ$гг по ;Леаовательвое заиеппение измерительного элемента со всеми аубьямн контролируемого колеса в регистрируют рассогласование угловых двух звеньев, аа одно из которы принимают измерительный элемент, а за второе - выходное звено кинематической цепи прибора, создающейсогласованноедв& жение. В качестве измерительного элемента в известном способе используют два соосно установленных измерительных колесу, профили которых расположены через зуб в зацеплении с контролируемым; колесом. Этот способ является наиболее близКИМ к предлагаемому по технической сущности и достигаемому результату. Однако весьма сложен в реализации, поскольку тр бует использования прибора с точной образ цовой передачей и изготовления двух измерительных, колес высокой степени точнос ти, которые должны быть точно выставлены в угловом положении одно относительно другого. Целью изобретения является упрощение реализации способа. Это.достигается тем, что в качестве измерительного элемента используют кулачок с профилем, например эвольвентным, соответствующим профилю зуба измеритель ного колеса того же модуля, что и контролируемое колесо, кулачку и контролируемому колесу сообщают согласованное прерывистое вращательное движение до начала зацепления кулачка с соответствующим зубом контролируемого колеса, а за второе звено при регистрации рассогласования угловых поворотов принимают контропируе-. мое колесо. На фиг. 1 изображена принципиальная схема (пример выполнения) прибора для комплексного контроля зубчатых.колес, используемого для осуществления предлагаем го способа: на фиг. 2 - контролируемое колесо и кулачок в момент зацеплення;на фиг. 3 - пример записи прерывной кинема тической погрешности. На щпинделях 1 и 2 прибора для комплексного контррля в однопрофильном зацепЛенин устанавливают контролируемое колесо 3 с числом зубьев Z и сопр1ягаемый с ним измерительный элемент в виде кулачка 4, имеющего профиль в форме эвольвенты, соответствующей профилю зуба измерительног колеса того же модуля, что и контролируемое колесо. На фиг. 2 хорошо видно, что кулачок 4 по существу представляет собой зуб воображаемого измерительного колеса (изображено : тонкими линиями с числом .зубьев Z 2 Такой кулачок может быть выполнен, ва15)имер, по технологии, применяемой для кэготовления образцовых эвольвентных кулачков, используемых для фоверки эвольвентсхмеров. Зубчатый сектор 5 и зубчатое колесо 6, закрепленные соответственно на шпинделях 1 и 2, образуют кинематическую пару, со.общаканую согласованное прерывистое вращение колесу 3 и кулачку 4. Такое расположение сектора и зацеплякидегося с ним колеса будет иметь место, если 2 j Zy . Если Z.y-Z, то сектор 5 будет закреплен на шпинделе 2, а колесо 6 - на щпиндепе 1 ЕслиХ.. то расположение может быть любым. На том же щпинделё, на котором установлен сектор 5, должен быть установлен привод 7. Параметры сектора 5 и колеса 6 должны быть выбраны такими, чтобы обеспечивалось последовательное зацепление кулачка 4 со всеми зубьями контролируемог9 колеса 3. Такое зацепление может быть обеспечено и другими средствами, например при помощи автономных шаговых двигателей, работающих по заданной программе и связанных каждый с одним из шпинделей прибо ра, ипн периодически включаемых /юигате- лей с регулируемым числом оборотов. На щпинделях 1 и 2 установлены также угловые преобразователи 8 н 9, сигналы с которых поступают на блок 10 сравнения (например фазовый компаратор), а затем на регистрирующее устройство 11. Способ осуществляется следующим образом. На приборе . устанавливают требуемое межцентррвое расстояние и настраивают прибор на контроль требуемого передаточного отношения. Устанавливают кулачок и регулируют устройство, определякяцее вклю чение. начала и конца регистрации. Устанавливают контролируемое колесо. Настраивают и регулируют устройство для вьщачи точного деления на 2 и устанавливают кинематаческук) пару (ипн щэугое средство) для сообщения согласованного пр ерьюистого движения контролируемому колесу и кулачку. В качестве устройств, определяющих включение начала и конца регистрации и выдающих точное деление на Z j( (дпя получения образцового углового шага) мо. гут быть использованы угловые преобразователи 8 и 9. Устройство для точного деления на Z может быть отключено, если Z , поскольку в этом случае соотношение углов поворота щпинделей будет одинаковым как в период.зацепления кулачки,.так ч в чэс- тальное время.
Сообщая контропируемому колесу и кулаку согласованное прерывистое вращательное пвижеиие до начала зацепления купачка с соответствующим зубом колеса и производя последовательное зацепление купачка со
всеми зубьями контролируемого колеса, регистрируют рассогласование угловых поворотов контролируемого колеса и кулачка в период их зацепления с использованием для начала отсчета при измерении каждого зуба сигналоэ о повороте контролируемого копеса на образцовый угловой шаг.
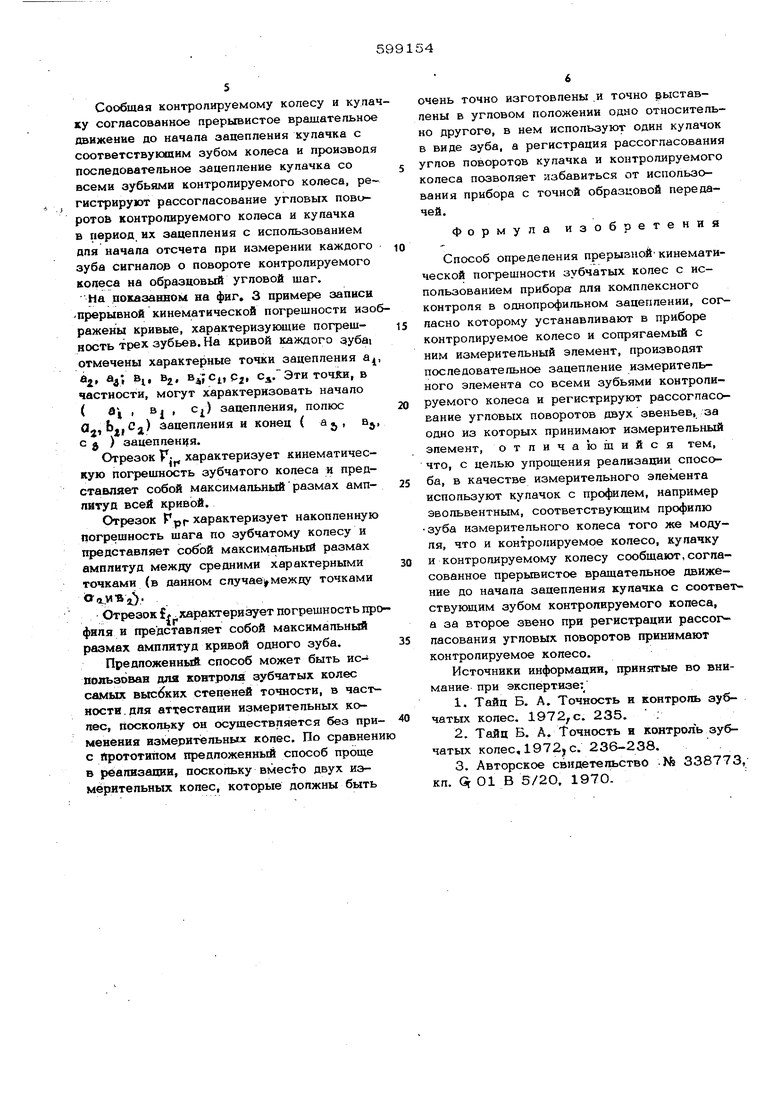
На показанном на фиг. 3 примере записи прерывной кинематической погрешности изображены кривые, характеризукацие погрешность трех зубьев. На кривой каждого gy6ai
отмечены характерные точки зацепления а, а BI, в, , р2, С.1.Эти точки, в частности, могут характеризовать начало ( fli , В| , с) зацепления, полюс
02,b,,Cj) зацепления и конец ( а, в, с ) зацеп пен1;я.
Отрезок F: характеризует кинематическую погрешность зубчатого колеса и представляет собой максимальный размах амппнтуд всей кривой.
Отрезок Грс характеризует накопленную погрешность шага по зубчатому колесу и представляет собой максимальный размах амплитуд между средними характерными
точками (в данном случаеумежиу точками СГаИВа).
Отрезок f характеризует погрешность профиля и представляет собой максимальный размах амплитуд кривой одного зуба.
ПредпоженньА способ может быть использовав для ковтроля зубчатых колес самых высбких степеней точности, в частности . для аттестации измерительных колес, поскольку Он осуществляется без примевёния измерительных колес. По сравнению с йрототипом предложенный способ проще в реализации, поскольку вместо двух измерительных колес, которые должны быть
очень точно изготовлены .и точно выставлены в угловом положении одно относительно другого, в нем используют один кулачок в виде зуба, а регистрация рассогласования углов поворотов купачка и контролируемого колеса позволяет избавиться от использования прибора с точной образцовой передачей.
Формула изобретения
Способ определения прерывнойкинематической погрешности зубчатых колес с использованием прибора для комплексного контроля в однопрофильном зацеплении, согласно которому устанавливают в приборе контролируемое колесо и сопрягаемый с ним измерительный элемент, производят последовательное зацепление измерительного элемента со всеми зубьями контролируемого колеса и регистрируют рассогласование угловых поворотов двух звеньев, за одно из которых принимают измерительный элемент, отличающийся тем, что, с целью упрощения реализации способа, в качестве измерительного элемента используют кулачок с профилем, например эвольвентным, соответствуквдим профилю зуба измерительного копеса того же модуля, что и контролируемое колесо, кулачку и контролируемому колесу сообщают, согласованное прерывистое вращательное движение до начала зацепления купачка с соответствующим зубом контролируемого колеса, а за второе звено при регистрации рассогласования угловых поворотов принимают контролируемое копесо.
Источники информации, прин$ггые во внимание при экспертизе:
1.Тайц Б. А. Точность и контроль эубчатых колес. 197 2 с. 235. ;
2.Тайц Б. А. Точность и контролЪ зубчатых колес, 1972,, с. 236-238.
3.Авторское свндетепъство -Ns 338773 кл. Q 01 В 5/20, 1970.
фчг.1
фиг.2