Изобретение относится к машиностроению, а именно к средствам контроля зубчатых колес.
Цель изобретения повьшение точности за счет исключения фиксации и расфиксации контролируемого колеса на шпинделе прибора и повьшение производительности контроля за счет уменьшения подготовительных операций.
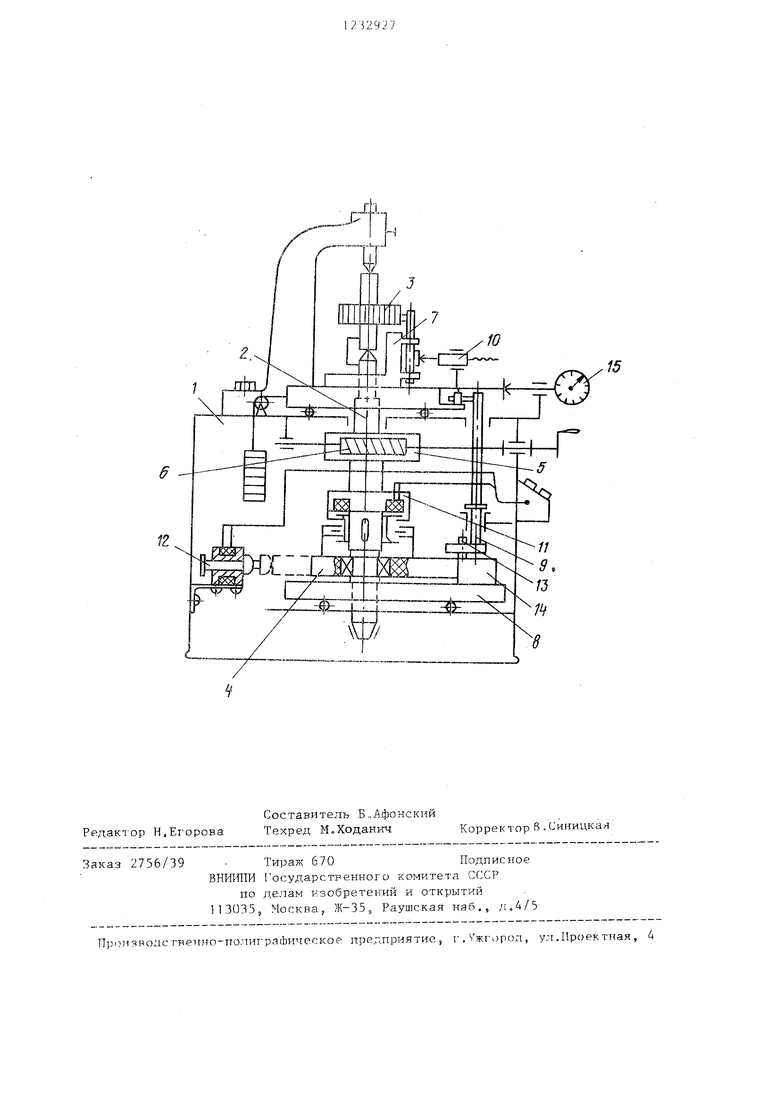
На чертеже изображена принципиальная схема прибора для контроля прерывной кинематической погрешности зубчатых колес
Прибор для контроля прерьтной кинематической погрешности включает в себя станину 1g первый шпиндель 2, расположенный в станине 1 и предлазначенньш для установки на одном из его концов контролируемого зубчатого колеса 3, .звольвентный кулак 4, установленный на втором конце первого шпинделя 2, ведомое звено 5 первого, шпинделя 2, жестко закрепленное на нем-, ведущее зв€1- но 6 первого шпинделя 2, установленное на станине i и кинемати с ески связанное с, ведомым звеном 5, верхнюю каретку 7, расположенную на верхней плите станины 1 нияшюю каретку 8, расположенную на нижней плите станины 1 и кинематически связанную с профильной стороной эвольвент- ,ного кулака 45 второй шпиндель 9, расположенный параллельно первому шпинделю 2 и связанный с верхней и нижней каретками 7 и 8, индуктивный датчик 10 перемещений,, установленный на верхней каретке 7. электромагнитную муфту 11 5одна половина которой связана с первым ашинделем 2 а другая - с эвольвентнЫлЧ кулаком 45-элект ромагнитный упор I2 расположенный с; тыльной стороны звольвентного кулака 4, причем последний установлен на первом шпинделе 2 с возможностью поворота вокруг его оси, а ведомое звено 5 первого шпинделя 2 выполне-- но в виде полного червячного колеса.
При работе прибора использзтотся также ролик 13 и планка 14 закрепленные на нижней каретке, индикатор 15,, закрепленный на станине 1 и связанный с верхней кареткой 7а
. Прибор работает следзтощим образом „
Прибор настраивается по номинальной вел.ртчине основной окружности
32927- 2
контролируемого колеса 3. Колесо 3 устанавливают в центре и соединяют с первым шпинделем 2 поводковым уст- , ройством. При выключенном питании 5 прибора, измерительная система прибора устанавливается в исходное положение Предварительно включается электром агнитная муфта П , а электромагнитный упор выключается, Измери- 16 тельньй наконечник вводится в зацепление с первым зубом в начальную точку эвольвенты так, чтобы перо самописца установилось посредине бумажной ленты (на чертеже не показана), Пос- 15 ле этого проверяют профиль первого зуба холеса на всей длине эврльвент- ного участка,
В процессе контроля контролируемому колесу 3 сообщают вращательное 20 движение, верхней каретке 7 - образцовое дв:ижение через злектромагнит- ную муфту П, эвольвентный кулак 4, планку 14, ролик 13 и второй шпиндель 9„ Величина перемещения верхней 25 каретки 7 контролируется по индикатору 15„ В момент достижения верхней кареткой 7 заданного положения (после схода измерительного наконечника с зуба) вращение первого шпинделя 2 30 прекращается. Контроль первого зуба закончен. Далее подготавливают изме- рителв ную систему для контроля следующего зуба. Выключают электромагнитную муфту 11 при одновременном 35 включении электромагнитного упора 12, В этом случае эвольвентный кулак разъединяется с первым шпинделем 2, а электромагнитный упор 12 становится в рабочее положение,
В силу Toroj что червячная передача является самотормозящейся систе- моЙ5 первый шпиндель 2с контролируе- мьм колесом 3 остаются неподвижными. Верхняя каретка 7 начинает двигать- ся назад и через второй .шпиндель 9, ролик 13 и планку 14 вращает эволь- вентньп кулак 4 относительно первого шпинделя 2 в обратном направлении до соприкосновения тыльной сторо50
ны
эвольвентного кулака 4 с злектро тагнитиым упором 12, Последний установлен так5 что в своем рабочем положении он останавливает эвольвентный кулак 4 в позиции, которая соответст- вует П13охождению верхней каретки 7 назад на величину шага зацепления. После отвода верхней каретки 7 на величину шага зацепления включают
электромагнитную муфту 11 и выключают электромагнитный упор 12, В этом случае измерительная система прибора соединяется с первым шпинделем 2, а электромагнитный упор 12 отходит от эвольвентного кулака 4, Вращением червяка червячной передачи в обратном направлении возвращают первый шпиндель 2 с верхней кареткой 7 в исходное положение. Прибор подготов- лен для контроля и записи следующего зуба,
Ввиду того, что угол поворота первого шпинделя 2 в обратном направлении значительно меньше угла его по- ворота в прямом, контроль второго и последующих зубьев возможен благодаря тому, что ведомое звено 5 выполнено в виде полного червячного колеса,.
Использование прибора для контроля прерьгоной кинематической погрешности совместно с самописцем позво- ляет вести запись .эвоЛьвентограммы, не выключая лентопротяжный механизм и не арретируя перо самописца в течение всего цикла контроля.
Использование изобретения повьш1а- ет точность контроля на 30% и производительность в 1,5 раза,
Формула изобретения
Прибор для контроля прерьшной кинематической погрешности зубчатых
колес, содержащий станину, первьш шпиндель, расположенный в станине и предназначенный для установки ня одном из его концов контролируемого зубчатого колеса, эвольвентный кулак, установленный на втором конце первого шпинделя, ведомое звено первого шпинделя, жестко закрепленное на кем ведущее звено первого шпинделя, установленное на станине и кинематически связанное с ведомым звеном, верхнюю каретку, расположенную на верхней плите станины, нижнюю каретку, расположенную на нижней плите станины и кинематически связанную с профильной стороной эвольвентного кулака, второй шпиндель, расположенный параллельно первому шпинделю, связанный с нижней и верхней каретками, и индуктивный датчик перемещений, установленный на верхней каретке, отличающийся тем что, с целью повышения точности и производительности контроля, он снабжен электромагнитной муфтой, одна половина которой связана с первым шпинделем, а другая - с эвольвентным кулаком и электромагнитным упором, расположенным на станине прибора с тыльной Стороны эвольвентного кулаку, а эвольвентный кулак установлен на первом шпинделе с возможностью поворота вокруг его оси, а ведомое звено первого шпинделя выполнено в виде полного червячного колеса.
15
4ьГ
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для контроля прерывной кинематической погрешности зубчатых колес | 1987 |
|
SU1402796A2 |
| Устройство для замера линейной координаты продольной линии зуба | 1983 |
|
SU1089391A1 |
| Устройство для определения прерывной кинематической погрешности зубчатых колес | 1980 |
|
SU926526A1 |
| Устройство для контроля эвольвентного профиля зубчатых колес | 1982 |
|
SU1087766A1 |
| УСТРОЙСТВО к СТАНКАМ ДЛЯ НАРЕЗАНИЯ РЕЗЬБ С НЕРЕМЕННЫМ ШАГОМ | 1973 |
|
SU379345A1 |
| ЗУБОШЕВИНГОВАЛЬНЫЙ СТАНОК | 1969 |
|
SU254314A1 |
| Станок для обработки кольцевого желоба переменного профиля | 1988 |
|
SU1645108A1 |
| Способ определения прерывной кинематической погрешности зубчатых колес | 1976 |
|
SU599154A1 |
| Станок для заточки зубьев многолезвийного фасонного инструмента | 1976 |
|
SU737193A1 |
| Шрифтолитейная машина для отливки литер из пластмассы | 1970 |
|
SU322037A1 |
Изобретение относится к средствам контроля зубчатых колес и позволяет повысить точность за счет исключения (Фиксации и расфиксации контролируемого колеса на шпинделе прибора, а также повысить производительность контроля за счет уменьшения подготовительного времени на измерение. Это достигается тем, что прибор дополнительно снабжен электромагнитной муфтой, одна половина которой связана со шпинделем, а другая - с эвольвентным кулаком и злектромат- нитным упором, расположенным на станине прибора с тыльной стороны звольвентного кулака, эвольвентный кулак установлен на шпинделе с возможностью поворота вокруг его оси, а ведомое звено шпинделя вьтолнено в виде полного червячно о колеса. 1 ил. с И ьо 00 к со tsD 
Редактор Н.Ет орова
Составитель Б„.А.фонский
Техред М.Ходан1 ГЧКорректор В .Синицкая
2756/39
Тираж 670Подписное
ВНИИПИ Государственного комитета СССР
по делам к зобретен ий и открытий 113035, Москва, Ж-355 Раушская наб., д.4/5
Произволстренно-по.ттг расЬическое предприятие, г,Ужг1)род, ул .Проектная, 4
| Тайц Б.А | |||
| Точность и контроль зубчатых колес | |||
| - М.: Машиностроение, 1972, с.166, 167, рис | |||
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
