4 О
СО
t
Изобретение относится к автомати- управлению технологическими Процессами в условиях действия перио Дических возмущений и может быть ис- йользовано при проектировании автомафических систем подачи кислорода в агрегаты металлургического производства.
Целью изобретения является новы- шение точности управления за счет йодавления периодических возмущений. ; На чертеже представлена структур 1;1ая схема системы управления техноло- ическим процессом.
Система содержит регулирующий фрган , датчик 2 величины управляю- фего воздействия, первый преобразова- ель 3, первый блок 4 сравнения, ре- улятор 5, объект 6 регулирования, Датчик 7 регулируемого параметра, иторой преобразователь 8, задатчик 9 регулируемого параметра, второй блок
О сравнения, первый 11, второй 12 третий 13 дифференциаторы, первьй
4 и второй 15 логические блоки, сум- фатор 16, интегратор 17 и третий пре- фбразователь 18.
; Первый 3, второй 8 и третий 18 пре фбразователи являются измерительными, Преобразующими входные физические величины в электрические сигналы.
Система работает следующим образом. Х I Электрический сигнал с датчика 7 егулируемого параметра после преоб- )азования в унифицированный сигнал на втором 8 преобразоват-еле, подается на второй блок 10 сравнения, где 6н сравнивается с сигналом задатчика регулируемого параметра, после чего Сигнал рассогласования подается на вход первого дифференциатора 11 и на первый вход первого логического блока 14, Сигнал второй производной с выхода второго дифференциатора 12 подается на второй вход первого логического блока 14. В случае совпадения знаков сигналов второй производной и рассогласования сигнал на выходе первого Логического блока 14 соответствует сигналу рассогласования, если же это условие не выполняется, то на выходе йервого логического блока 14 нулевой сигнал Сигнал с выхода первого логического блока 14 подается на сумматор 16, где он суммируется с сигналом первой производной. С выхода сумматора 16 сигнал подается на второй вход
логического блока 15, на первый вход которого подается сигнал третьей производной с выхода третьего дифференциатора 13, Во втором логическом блоке 15 сравниваются знаки выходного сигнала сумматора 16 и сигнала, соответствующего третьей производной, с выхода третьего дифференциатора 13. В случае их совпадения сигнал на выходе второго логического блока 15 равен выходному сигналу сумматора 16 если же знаки противоположны, сигнал на выходе второго логического блока 15 равен нулю. Сигнал на выходе второго логического блока 15 определяется следующим образом:
Y + а,х, при и + + ,)S 0;
Y : а,х, при . х ; О и а, X, Хз& О
I О при x,j : О и а, X, X} -0
или ( + а,х,) где XQ, X,, х, х - соответственно
сигналы рассогласования первой второй и третьей производных;
о
коэффициенты усиления соответственно по рассогласованию и первой производной рассогласования.
Q
0
Сигнал с выхода второго логического блока 15 поступает на вход интегратора 17. Электрический сигнал nor следнего после преобразования в унифицированный сигнал в третьем преобразователе 18 используется в качестве задания в системе регулирования, Здесь в первом блоке 4 сравнения фор-- мируется сигнал ошибки по сигналам заданной и фактической интенсивности и регулятор 5 поддерживает интенсивность на заданном уровне, (
При увеличении управляющего воздействия на объект 6 регулирования (например, интенсивности дутья в камере сгорания) технический процесс интенсифицируется, что приводит к изменению регулируемого параметра или его производной. При этом для ряда процессов характерным является нали- чие периодического внешнего воздейстВИЯ, Например, применительно к камере сгорания после воспламенения происходит выделение тепла, количество которого является функцией времени и пропорционально массе топлива, реагирующей в данный момент времени. По мере выгорания топлива выделение тепла в единицу времени уменьшается. Таким образом, дискретная подача топлива является фактором, вызывающим появление периодического внешнего возмущения регулируемого параметра - температуры рабочего пространства. Это внешнее возмущение может быть представлено в виде некоторой функции f( t), которая при ритмичной пода че топлива является гармонической или близкой к ней функцией. При выполнении указанных выше условий воздействие на входе интегратора 17 равно нулю.
Таким образом, изменение величины управляющего воздействия, а следовательно, и реакций всей системы на внешнее воздействие f(t), связанное с дискретным возмущением, будет от- . сутствовать или во всяком случае будет ослаблено. Ошибка регулирования определяется величиной отклонения регулируемого параметра на это возмущение, а также выбором параметров регулирования aj, и а(. При изменении заданного значения с задатчика 9 регулируемого параметра или при появлении внешнего воздействия, характер которого отличен от f{t), изменение величины управляющего воздействия будет производиться с учетом инерционности объекта 6 регулирования, обеспечивая достаточную точность и скорость регулирования параметра (в рассмотренном примере - температуры в камере сгорания).
0
5
Формула изобретения- Система управления технологическим процессом, содержащая объект регулирования, первый вход которого является входом сигнала периодического возмущения, второй вход соединен с выходом регулирующего органа, выход объекта регулирования через последовательно соединенные датчик регулируемого параметра и второй преобразователь соединен с входом второго блока сравнения , второй вход которого соединен с задатчиком регулируемого параметра, второй выход регулирующего органа через датчик величины управляющего воздействия и первый преобразователь соединен с входом первого блока сравнения, выход которого через регулятор соединен с входом регулирующего органа, отличающаяся тем, что, с целью повьш1ения точности управления за счет подавления периодических возмущений, она дополнительно содержит 5 три дифференциатора, сумматор, первый и второй логические блоки, выход второго логического блока через последовательно соединенные интегратор и третий преобразователь соединен с вторым входом первого блока сравнения, выход второго блока сравнения соединен с входа и первого дифференциатора и первого логического блока, второй вход которого соединен с выходом второго дифференциатора, а выход первого логического блока соединен с входом сумматора, второй вход которого соединен с выходом первого дифференциатора, который соединен с входом второго дифференциатора, выход которого соединен с входом третьего дифференциатора, выход которого соединен с входом второго логического блока, второй вход которого соединен с выходом сумматора.
0
5
0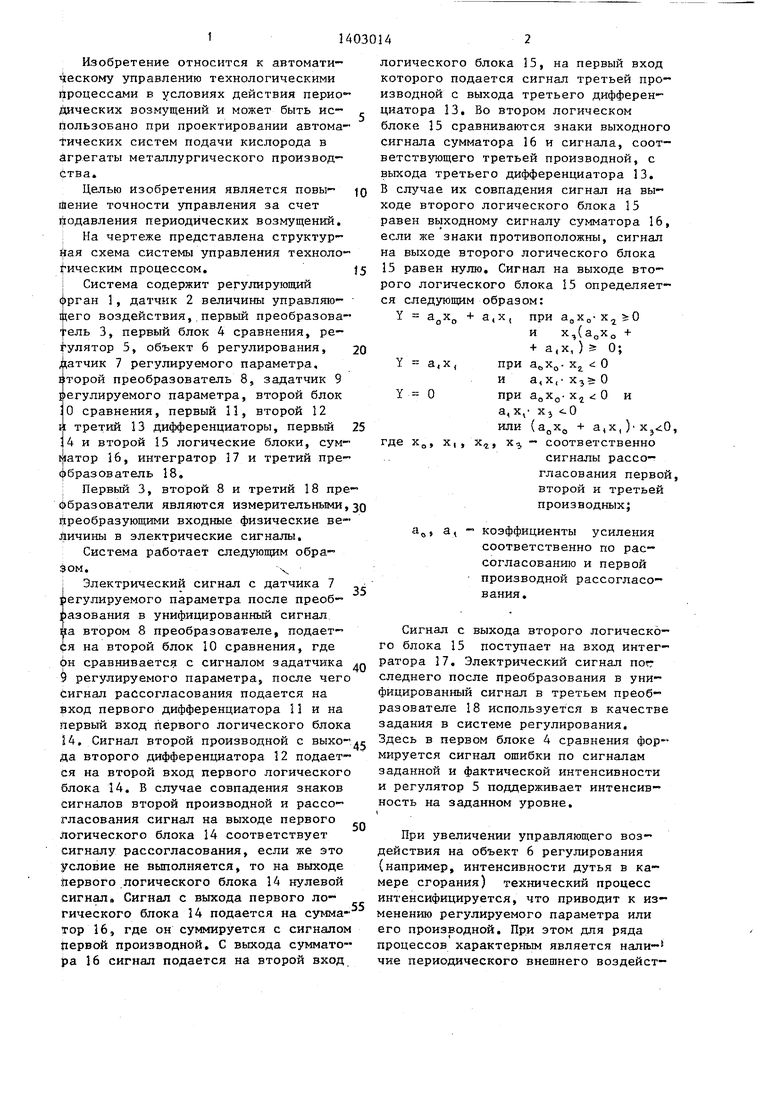
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |
| Система автоматического регулирования | 1978 |
|
SU752221A1 |
| Способ автоматического управления тепловым режимом зоны вторичного охлаждения машины непрерывного литья заготовок и устройство для его осуществления | 1985 |
|
SU1284655A1 |
| Способ управления режимом работы двухвалкового вертикального кристаллизатора и устройство для его осуществления | 1986 |
|
SU1424951A1 |
| Устройство управления электроприводом моталки на стане горячей прокатки | 1988 |
|
SU1607988A1 |
| Система регулирования объектов высокого порядка с запаздыванием | 1989 |
|
SU1667002A1 |
| СПОСОБ УПРАВЛЕНИЯ НАГРЕВОМ МЕТАЛЛА В ПЛАМЕННОЙ НАГРЕВАТЕЛЬНОЙ ПЕЧИ | 1994 |
|
RU2068006C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ПЕРЕГРЕТОГО ПАРА МНОГОТОПЛИВНОГО ПАРОГЕНЕРАТОРА | 1991 |
|
RU2044213C1 |
| Способ управления процессом непрерывной разливки металла в неподвижный кристаллизатор и устройство для его осуществления | 1987 |
|
SU1447551A1 |
| Способ весового дозирования и устройство для его осуществления | 1987 |
|
SU1629759A1 |
Изобретение относится к автоматическому управлению технологическими процессами в условиях действия периодических возмущений и может быть использовано при проектировании автоматических систем подачи кислорода в агрегаты металлургического производства. Целью изобретения является повышение точности управления за счет подавления периодических возмущений. Система управления содержит регулирующий орган 1, датчик 7 регулируемого параметра, датчик 2 величины управляющего воздействия, три преобразователя 3, 8, 38, два блока 4, 10 сравнения, регулятор 5, объект 6 регулирования, задатчик 9 регулируемого параметра, три дифференциатора 31-33, два логических блока 34-35, сумматор 16 и интегратор 17, Сущность изобретения заключается в том, что путем логической обработки сигнала ошибки регулирования периодическая составляющая в ее составе фильтруется и не пропускается на вход регулятора. 3 ил. Q S (Л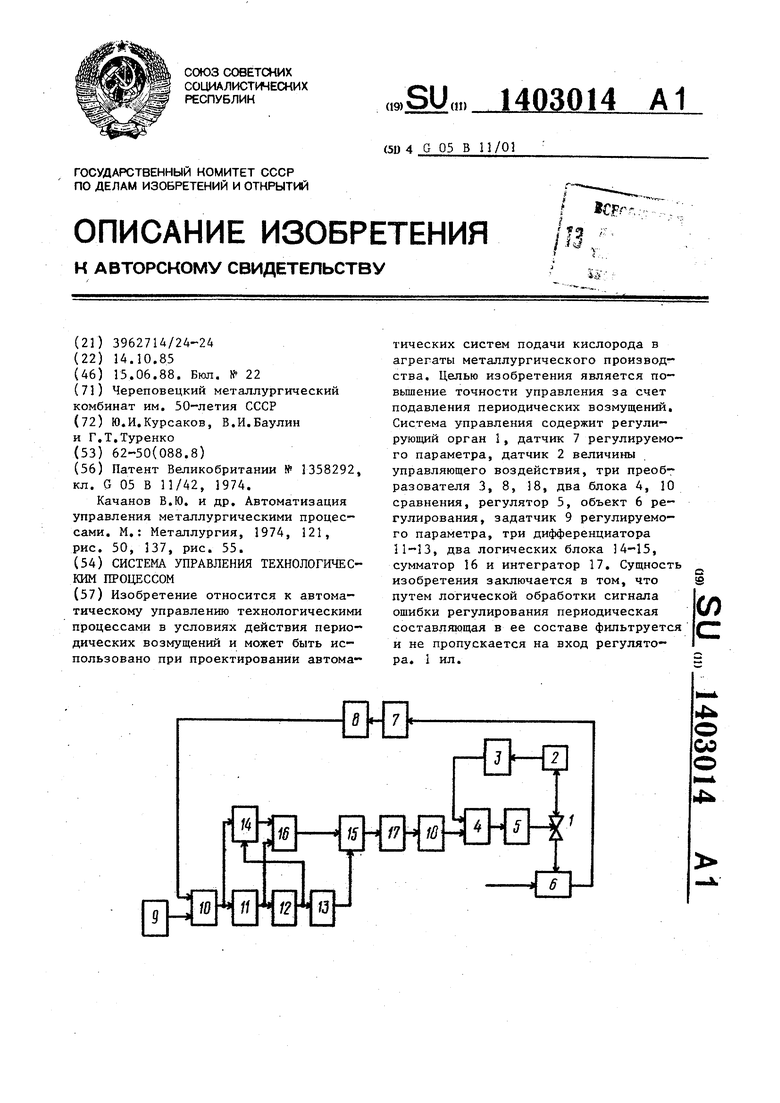
| Патент Великобритании № 3358292, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Качанов В.Ю | |||
| и др | |||
| Автоматизация управления металлургическими процессами | |||
| М,: Металлургия, 3974, 321, рис | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
