Изобретение относится к системам автоматического управления и регулирования объектов с самовыравниванием и может быть использовано для высококачественного регулирования температурного режима электропечей. Известны систе1уы автоматического регулирования объектов с самовыравниванием, включающие в себя датчик и задатчик регулируемой величины, схему сравнения, пропорционально-ин тегральный и дифференциальный регулятор и преобразователь выходного сигнала регулятора в управляющий сиг нал 1 . Такие системы обеспечивают обработку возмущения без статической ошибки, однако, переходной процесс при этом имеет низкие качественные показатели, причем с уменьшением вре мёни переходного процесса, последний становится колебательным со значи- . тельным перерегулированием. Качество процесса управления и регулирования в таких системах зависит от точноети идентификации объекта, от величины возникшего рассогласования, от -ТОЧНОСТИ настройки регулятора, а так же от заданного уровня регулирования Высокая чувствительность систем к указанн1з1м величинам не позволяет получить стабильное качество процесса регулирования Наиболее близка к предлагаемой системе автоматического регулирования, содержащая последовательно соединенные датчик, схему сравнения, первый усилитель, сумматор, управляемый генератор.импульсов и объект регулирования, причем выход задатчи ка соединен со вторым входом схемы сравнения, вход дифференциатора сое динен с выходом первого усилителя,BI ход интегратора соединен со втоцилм входом cyinMaTopa, первый выход блок;1 управления ключами соединен с управляющим входом первого ключа, подключенного параллельно емкости интегратора 2 . Как известно, интегральная составляющая в регуляторе необходима для устранения статической ошибки в системе регулирования, однако при больших рассогласованиях в системе наблюдается изменение интегральной составляющей выше или ниже требуемой, что приводит к перерегулированию,так как для ее компенсации требуется сшибка противоположного знака, или затягиванию переходного процесса.
В яэвестной системе при больших рассосласованиях между заданным и дейс.тви(гельным значениями регулируемой, .величины вЕЛходной сигнал пропорционально интегрального и дифференциальноио регулятора обеспечивает на выходе управляемого генератора импульсов максимальное число импульсов , которые воспринимаются блоком .управления ключом, последний шунтирует емкость интегратора -на опредеjiOHHoe ВЕ)емя, чем достигается уменьшение влияния интегральной составляющей на перерегулирование в системе. Однако качество переходного процесса остается нестабильным, так как качество регулирования в системе по-прежнему зависит от величины возникшего рассогласования, от заданного уровня регулирования, от стабильности параметра объекта, от точности настройки регулятора и дополнительно от момента включения интегратора.
Цель изобретения. - улучшение качества регулирования объектов с самовыравниванием.
Поставленная цель достигается тем что в систему регулирования дополнительно введены второй ключ, выпрямитель, нуль-орган, компаратор и второ усилитель, причем вход выпрямителя соединен с выходом дифференциатора, а выход - со входами нуль-органа и компаратора, выходы которых соединены с соответствующими входами блока управления ключами, второй вход компаратора соединен с выходом второго усилителя, вход которого подключен к выходу задатчика, второй выход блока управления ключами соединен с управляющим входом второго ключа, вход которого соединен с выходом первого усилителя, а выход - со входом интегратора.
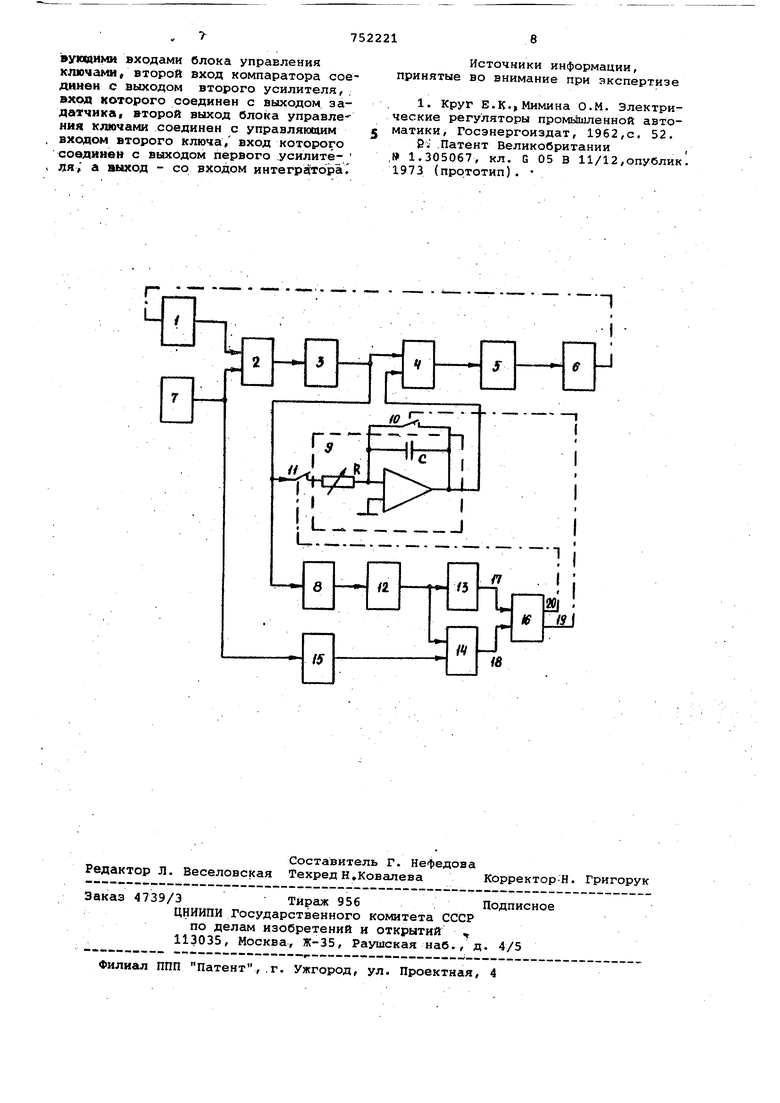
На чертеже представлена функциональная схема системы регулирования
Схема содержит датчик 1, схему 2 сравнения, первый усилитель 3, сумматор 4, управляемый генератор 5 импульсов, объект б регулирования,задатчик 7/ дифференциатор 8, интегратор 9, первый ключ 10, второй ключ 11, выпрямитель 12, нуль-орган 13, компаратор 14, второй усилитель 15, блок 16 управления ключами, входы 17 и 18 которого соединены с выходами нуль-органа и компаратора, а выходы подсоединены к ключам, выход 19 управляет ключом 10, а выход 20 ключом 11.
Система работает следующим образом.
В случае появления большого рассогласования в системе (объект выводят на режим или изменяют задание ргулирования) сигнал ошибки с выхода схемы 2 сравнения усиливается и поступает на дифференциатор 8, ас ег выхода через выпрямитель 12 на один
:из входов компаратора 14, на второй вход которого поступает нормированный усилителем 15 сигнал задатчика 7.
Если сигнал с дифференциатора 8 превышает уровень, задающийся с выхода уЪилителя 15, компаратор выдает сигнал на блок 16 управления ключами, который включает ключ 10, закорачивающий емкость интегратора. Ключ 11 в это время разомкнут и интегратор
0 отключен от усилителя рассогласования. Выходной сигнал регулятора будет состоять из одной пропорциональной составляющей. По мере подхода регулируемой величины к заданному
5 значению величина рассогласования уменьшается и после достижения установившегося состояния в системе наблюдается статическая ошибка, величина которой зависит от коэффициента
0 усиления системы. В этот момент выходной сигнал дифференциатора равен нулю, срабатывает нуль-орган 13 и I выдает сигнал на блок 16 управления ключами, который размыкает ключ 10 и включает ключ 11.
После истечения времени, требуемого для записи в интегратор 9 сигнала с выхода усилителя 3, сигнал.управления ключом 11 снимается и ключ снова отключает интегратор от усилителя. Интегратор превращаетгся в ячейку памяти, в которой записана величина интегральной составляющей,необходимая для установления и поддержания заданного значения регулирования.
5 С этого момента выходной сигнал регулятора будет состоять из суммы двух составляющих, пропорциональной ошибке и постоянной интегральной состав, ляющей.
Q При Таком управляющем сигнале регулируемая величина начинает изменяться в сторону уменьшения ошибки, при этом на выходе дифференциатора 8 снова появляется сигнал и нуль-орган 13 переходит в исходное состояние.
После достижения нового установившегося состояния навыходе дифференциатора 8 снова будет нулевой сигнал,
0 снова срабатывает нуль-орган 13 и подает управляющий сигнал на блок 16 управления ключами, который включает. ключ 11, подключая тем самым интегратор 8 к выходу усилителя 3. Так
как в этот момент сигнал ошибки равен или близок нулю, то интегральная составляющая остается приблизительно на прежнем уровне и система переходит в режим слежения за ошибкой. . Такая последовательность работы
0 системы при появлении больших рассогласований позволяет полностью исключить влияние интегральной составляющей на Переходной процесс и получить последний без перерегулирования
5 с точным выходом к заданному значению за счет определения на первом этапе работы системы требуемого значения интегральной составляющей,запоминания его в интеграторе,и после достижения регулируемой величиной ; заданного значения и окончания переходного процесса, включения интегратора с записанной в нем величиной интегральной составляющей постоянно. Уравнение работы пропорциональноинтегрального регулятора записывается в виде
/u U.e.Je.c)(t), (1)
где k - коэффициент при пропорциональной составляющей; Е. - величина ошибки регулирования,
RC - постоянная интегрирования (U - величина управляющего воздействия.
При интегральной составляющей равной нулю требуемое управляющее воздействие в установившемся режиме определяется первым слагаемым уравнения (1. Если предположить, что эта величина и присвоена интегральной составляющей, то, очевидно, первое слагаемое уравнения (1) должно равняться нулю, а это возможно при е О.
Следовательно, если считать, что условия регулирования не изменяются после г упоминания значения fu в интеграторе, то в установившемся режиме система переходит к заданном значению регулируемой величины. При этом вид переходного процесса полностью зависит от величины коэффициента усиления пропорциональной составляющей.
Если коэффициент усиления выбран максимальным, исходя из условия монотонности переходного процесса,то такая система обеспечивает минимум времени переходного процесса без перерегулирования.
Описанный порядок работы системы позволяет использовать коэффициенты при интегральной составляющей больш единицы, что обеспечивает высококачественную отработку возмущения по нагрузке.
В математическом виде порядок работы регулятора записывается, следующим образом.
со
fu-k-e+U ep -b Je-dt (2)
Чт
гдеСст статическая ошибка при пропорциональном регулировании, tj. - время окончания переходного процесса.
Если постоянная времени интеграiTOpa выбрана равной 1, то выражение (2) имеет вид
со
(b .E +
. . tcT
а регулятор, соответствующий этому алгоритму - минимальное число настроечных параметров, что значительно
упрощает настройку системы регулиро0
вания.
Так как определение требуемой интегральной составляющей производится на первом этапе переходного процесса и ее :влияние определяется только коэффициентом усиления пропорциональной составляющей (величиной статической ошибки), то, независимо от начальных условий регулирования, величины рассогласования и состояния параметров объекта регулирования в
настоящий момент, система обеспечивает стабильное качество переходного процесса (время переходного процесса близкое к минимальному и без перерегулирования).
Использование предлагаемой системы автоматического регулирования объектов с самовыравниванием, например ,.электропечей, позволяет полу0чить стабильное качество переходного процесса при любых возмущениях по заданию и по нагрузке при минимальном времени регулирования.
Такая система не требует сложного расчета, легко настраивается и . может быть с успехом применена для прецизионного регулирования технологических процессов.
40
Формула изобретения
Система автоматического регулирования объекта с самовыравниванием,
содержащая последовательно соединенные датчик, схему сравнения,первый усилитель, сумматор, управляемый генератор импульсов и объект регулирования, причем выход задатчика соединен со вторым входом блока сравнения, вход дифференциатора соединен с с выходом первого усилителя, выход интегратора соединен со вторым входом сумматора, первый выход блока управления ключами соединен с управляющим входом первого ключа, подключенного параллельно емкости интегратора, отличаю щ. аяся тем, что, с целью улучшения качества регулирования, в нее дополнительно
введены второй ключ, нуль-орган,компаратор, второй усилитель и выпрямитель, вход которого соединен с выходом дифференциатора, а выход - со входами нуль-органа и компаратора
выходы которых соединены с соответствуювдими входами блока управления ключами, второй вход компаратора соединен с выходом второго усилителя, вход которого соединен с выходом эадатчика второй выход блока управле-ния ключами соединен с управляющим входом второго ключа/ вход которого соединен с выходом первого усилителя, а выход - со входом интегр ора.
Источники информации, принятые во внимание при экспертизе
1. Круг Е.К.Мимина О.М. Электрические регуляторы промышленной автоматики, Госэнергоиздат, 1962,с. 52.
&; Патент Великобритании , , 1.305067, кл, G 05 В 11/12,опублик. 1973 (прототип). 

| название | год | авторы | номер документа |
|---|---|---|---|
| Пропорционально-интегральныйРЕгуляТОР | 1979 |
|
SU832528A1 |
| Устройство автоматического регулирования толщины полосового проката | 1982 |
|
SU1068193A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1990 |
|
RU2047887C1 |
| Устройство для регулирования технологических параметров по заданной программе | 1983 |
|
SU1136121A1 |
| Система регулирования | 1988 |
|
SU1654777A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2066873C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| Система управления технологическим процессом | 1985 |
|
SU1403014A1 |
| Система управления | 1976 |
|
SU714350A1 |
