Г(2)) 4113197/24-07 (22) 23.06.86 (46) 15,06.88. Бюл. № 22
(71)Киевский политехнический институт им.50-летия Великой Октябрьской социалистической революции
(72)В.Я.Жуйков, В.Е.Сучик, И.З.Мосонь и И.А.Яценко (33) 621 .316.722.1 (088.8)
(56)Авторское свидетельство СССР № 1049880, кл. G 05 F 1/56, 1982.
Авторское свидетельство СССР № 1288663, кл. G 05 F 1/445, 1985.
(54) СПОСОБ СТАБИЛИЗАЦИИ НАПРЯЖЕНИЯ
(57)Изобретение относится к электротехнике, в частности к области вторичного электропитания радиоэлектронной аппаратуры. Цель изобретения - повьшение качества стабилизации в динамическом режиме. Цифровое регулирование выходного параметра осуществляется путем разбиения диапазона его
возможных отклонений на частично пе- рекрыйающиеся зоны и обработки сигнала отклонения с разрядностью, мены шей полной разрядности выходного параметра. В устройстве. реализующем способ, выходной параметр воспринимается делителем 2 напряжения и преобразуется аналого-цифровым преобразователем 3 в цифровой код. С помощью блока 13 вьщеляется зона регулирования и определяется ее номер. Далее в контуре обратной связи осуществляется обработка сигнала отклонения, соответствующего вьщеленной зоне. Полученный в результате обработки код складывается или вычитается в сумматоре 8 из кода предьщущ его значения. Результат суммирования полной разрядности преобразуется в циф--.. роаналоговом преобразователе 9 в аналоговый сигнал, которым производится управление регулирующим элементом 1. 2 з.п.ф-лы, 3. ил.
§
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации напряжения или тока | 1985 |
|
SU1288663A1 |
| Электропривод | 1985 |
|
SU1275726A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Следящая система | 1982 |
|
SU1121647A1 |
| РЕГУЛЯТОРНАПРЯЖЕНИЯ С ВДФРОаШ УПРАШЕНИЕМ | 1971 |
|
SU433458A1 |
| Преобразователь постоянного напряжения в переменное программируемой формы | 1981 |
|
SU972650A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| АНАЛИЗАТОР НАПРЯЖЕНИЯ | 1990 |
|
RU2024880C1 |
| Цифровая следящая система | 1990 |
|
SU1833835A1 |
| Регулятор | 1984 |
|
SU1260913A1 |


САЭ О 00
t14
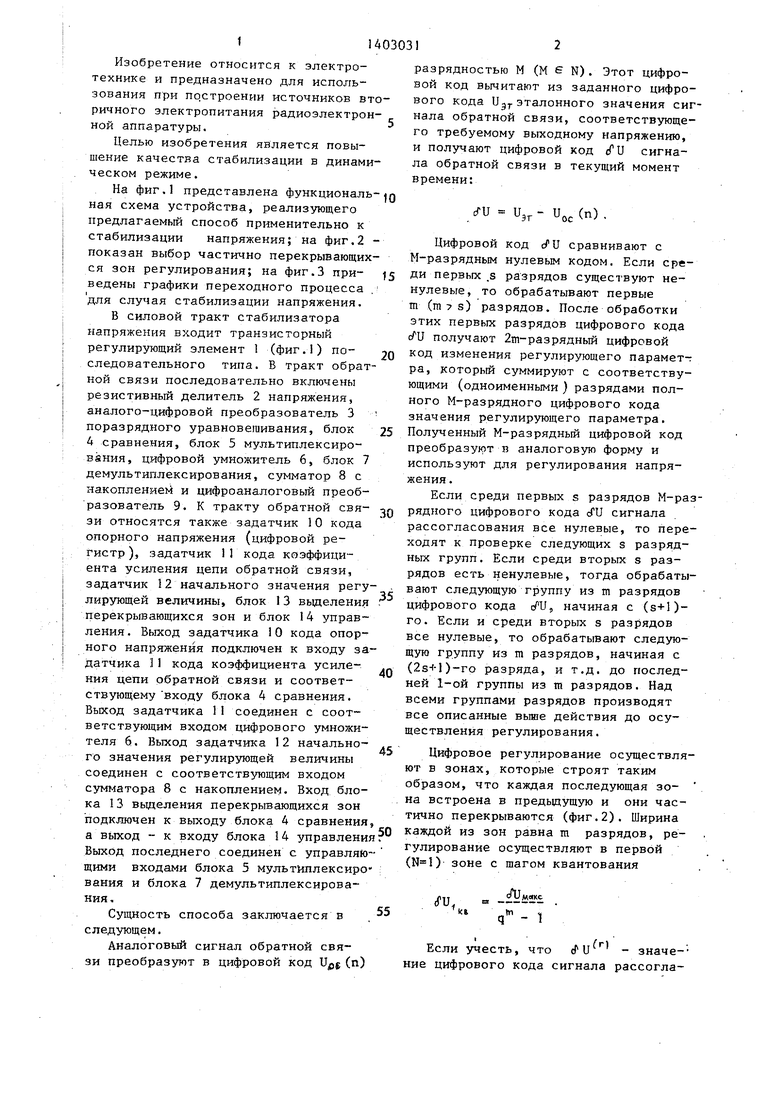
Изобретение относится к электротехнике и предназначено для использования при построении источников вторичного электропитания радиоэлектронной аппаратуры.
Целью изобретения является повышение качества стабилизации в динамическом режиме.
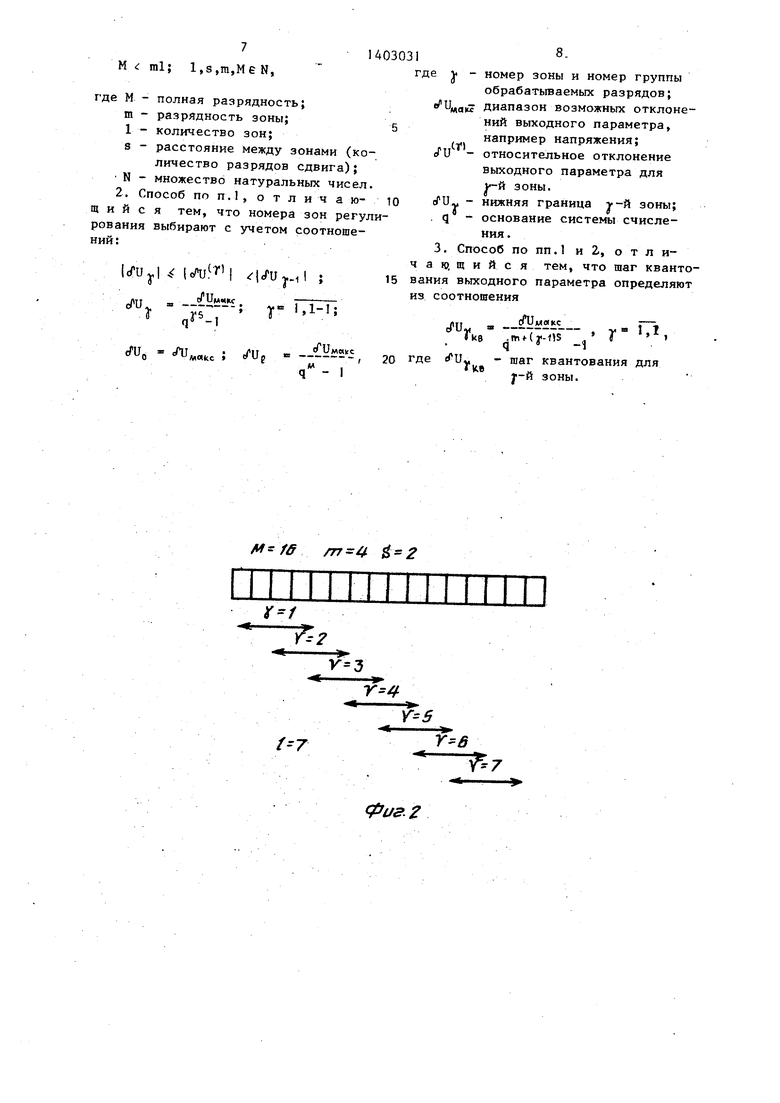
На фиг.1 представлена функциональнал схема устройства реализующего предлагаемый способ применительно к стабилизации напряжения; на фиг.2 - показан выбор частично перекрывающихся зон регулирования; на фиг.З при- ведены графики переходного процесса . для случая стабилизации напряжения.
В силовой тракт стабилизатора напряжения входит транзисторный регулирующий элемент 1 (фиг.1) последовательного типа. В тракт обратной связи последовательно включены резистивный делитель 2 напряжения, аналого-цифровой преобразователь 3 поразрядного уравновешивания, блок 4 сравнения, блок 5 мультиплексирования, цифровой умножитель 6, блок 7 демультиплексирования, сумматор 8 с накоплением и цифроаналоговый преоб- разователь 9. К тракту обратной связи относятся также задатчик 10 кода опорного напряжения (цифровой регистр ), задатчик 1 Г кода коэффициента усиления цепи обратной связи, задатчик 12 начального значения регу
лирующей величины, блок 13 выделения
перекрывающихся зон и блок 14 управления. задатчика 10 кода опорного напряжения подключен к входу задатчика 11 кода коэффициента усиления цепи обратной связи и соответствующему входу блока 4 сравнения. Выход задатчика 11 соединен с соответствующим входом цифрового умножителя 6. Выход задатчика 12 начального значения регулирующей величины соединен с соответствующим входом сумматора 8 с накоплением. Вход блока 13 выделения перекрывающихся зон подключен к выходу блока 4 сравнения, а выход - к входу блока 14 управления Выход последнего соединен с управляющими входами блока 5 мультиплексирования и блока 7 демультиплексирования.
Сущность способа заключается в следующем.
Аналоговый сигнал обратной связи преобразуют в цифровой код (п)
разрядностью М (М в N). Этот цифровой код вычитают из заданного цифрового кода Ug эталонного значения сигнала обратной связи, соответствующего требуемому выходному напряжению, и получают цифровой код сигнала обратной связи в текущий момент времени:
сги
Uarи.. (п) .
ос
g s
0
5
0
35
г
40
45
50
Цифровой код t/U сравнивают с М-разрядным нулевым кодом. Если среди первых .s разрядов существуют ненулевые, то обрабатывают первые m (га 7s) разрядов. После обработки этих первых разрядов цифрового кода t/U получают 2т-раз рядный цифровой код изменения регулирующего параметра, который суммируют с соответствующими (одноименными ) разрядами полного М-разрядного цифрового кода значения регулирующего параметра. Полученный М-разрядный цифровой код преобразуют в аналоговую форму и используют для регулирования напряжения.
Если среди первых s разрядов М-разрядного цифрового кода cfU сигнала рассогласования все нулевые, то переходят к проверке следующих s разрядных групп. Если среди вторых s разрядов есть ненулевые, тогда обрабатывают следующую группу из m разрядов цифрового кода с/Ч, начиная с (s+1)- го. Если и среди вторых s разрядов все нулевые, то обрабатывают следующую группу из m разрядов, начиная с (2s+l)-ro разряда, и т.д. до последней 1-ой группы из m разрядов. Над всеми группами разрядов производят все описанные выше действия до осуществления регулирования.
Цифровое регулирование осуществляют в зонах, которые строят таким образом, что каждая последующая зона встроена в предьиущую и они частично перекрываются (фиг.2). Ширина каждой из зон равна m разрядов, регулирование осуществляют в первой () зоне с щагом квантования
cfU,
к&
сШмоП I - 1
,(П
Если учесть, что сГ U - значе-- ние цифрового кода сигнала рассогла31403031
сования с точностью до разряда, являющегося границей снизу -f -и зоны регулирования, то для первой зоны оказывается справедливым соотношение
(cfU,). . (q -l)l и,)1,
и«акс
где Л1,
Регулирование осуществляют в пер- йой зоне до тех пор, пока первые s разрядов цифрового кода fl сигнала рассогласования не станут нулевыми. В слзгчае, когда первые s разрядов цифрового .кола нулевые,
т.е. f Ui , переходят к обработке второй группы из m разрядов цифрового кода сигнала рассогласования, начиная с (s+I)-ro разряда, что соответствует регулированию во второй зоне V 2 с шагом квантования
о UMOIHC
fUi
KB
m«S .
q -
Для второй зоны имеет место соотношение
, I 4 I /-5
(q) Uji
где
cfU
макс
. I
Поскольку () сГи rfU, , то
fi3i iicfu M ,|.
Аналогично вьше приведенному вы- ходнуто величину будут уточнять, пока t/4J не станет равным нулю с точностью до шага квантования послед- - ней зоны ( г 1), т.е.
fVc
KS
т(
q -1
Для последней зоны имеем
, I . | |«/и,.,,
где
(aK.c
( сСимокс
М.
q - 1
М, то f
Так как т+(1-1)s
и
в процессе регулирования цифровой код сигнала рассогласования, имеющий разрядность М обрабатывают т-раз- рядными группами по пропоцрионально- му,пропорционально-интегральному или пропорционально-интегрально-диф0 ференциальному закону. Например, со- .. ответствующий сигнал рассогласования усиливают в К раз путем умножения цифрового кода т-разрядн ой группы на т-разрядный код коэффициента усиления
5 К цепи обратной связи.
Абсолютная погрешность приведенной цифровой системы регулирования определяется шагом квантования 1-й зоны, т.е. младшим разрядом полного цифрового кода
0
fV
макс
KB
1
Регулирование в зонах за счет отбрасывания -необратимых разрядов приводит к регулирования в динамическом режиме. Погрешность регулирования в динамическом режиме зависит от номера зоны, в которой
ведется регулирование, и определяетсй шагом квантования в этой зоне.
У м«
г.
М
m + (r-iis .
Регулирование в частично перекрывающихся зонах улучшает качество регулирования в динамических режимах по сравнению с регулированием в неперекрывающихся зонах,поскольку в этом случае шаг квантования в qS раз меньше максимального сигнала рассогласования для г-ой зоны, а следовательно, и относительная погрешность
тоже в q5 раз меньше. С помощью
подбора параметров m из можно добиться заданной точности регулирования в динамическом режиме.
Устройство, реализующее предлагае- мый способ, работает следующим образом.
Напряжение обратной связи, пропорциональное выходному напряжению, поступает с выхода делителя 2 на вход аналого-цифрового преобразователя 3, преобразуется в параллельный цифровой код и подводится к сигнальному входу блока 4 сравнения. Последний осуществляет вычитание из задан
ного эталонного значения кода опорного напряжения текущее значение кода сигнала обратной связи. Результат вычитания в п{1ямом коде поступает на сигнальный вход блока 5 мультиплексирования, В зависимости от значения кода результата вычитания блок 13 вьщеляет зону регулирования, а блок 14 управляет передачей на выход блока 5 мультиплексирования соответ- ;ствующей группы разрядов. Этот код :переданной группы разрядов, направляется к цифровому умножителю 6, куда подводится также код коэффициента усиления цепи обратной связи из блок П .
В результате умножения на выходе цифрового умножителя 6 получают ре- ;зультирующий цифровой код, который подводится к демультиплексору 7. На |выходах демультиплексора.7, управляв ;мого блоком 14, появляется упомяну- тый выше цифровой код. Этот код постпает на вход сумматора 8 с накоплени .ем и в зависимости от знака результата вычитания в блоке 4 складьшается или вычитается из кода предыдущего значения регулирующего параметра. .Долученный на выходе сумматора 8 код поступает на вход цифроаналогового преобразователя 9 и преобразуется последним во временной интервал или другую вели 4ину, удобную для управления регулирующим злементом 1.
Регулирование выходного напряжения осуществляется путем из feнeния Цифрового кода эталонного значения )егулируемой и выполняется с начала для старшей группы разрядов йода сигнала с выхода блока 4 сравне йия. Затем с установлением выходной Величины, когда.старщая группа раз- обнуляется, переходят к младшей, и т.д. до самой младшей группы разрядов. При изменении (переключении уставки) цифрового кода эталонного значения опорного напряжения на выходе задатчика 11 в соответствии с этим кодом опорного напряжения появляется цифровой код максимально воз Можного коэффициента усиления цепи . Обратной связи, обеспечивающий наиболее быстрое протекание переходных Процессов в фильтре. Через наперед заданное время этот код заменяется кодом коэффициента усиления для ста- тического режима работы.
0
5
5
0
0
5
0
5
0
5
Кривые переходного процесса, приведенные на фиг.З, применительны к стабилизации напряжения. За эталонную принята кривая 15 для регулирования с разрядностью М 16 без.зон. Кривая 16 для регулирования в перек- рьшающихся зонах . с периодом Т более точно отражает эталонный переходный процесс, чем кривая 17,, относя- щаяся к регулированию в неперекрывающихся зонах аналогичной ширины.
Максимальная относительная ошибка при регулировании в перекрывающихся зонах в 3,1 раза меньще, чем в не- перекрьшайщихся зонах. При регулировании в неперекрьшающихся зонах наблюдается запаздывание в протекании переходного процесса. Вычисление текущего значения управляющего сигнала при регулировании в зонах осуществляется намного быстрее, чем при регулировании без зон.
Формула изобретения
.
М га + (l-I)s;
М ml; l,s,m,Me N,
где М - полная разрядность; m - разрядность зоны; 1 - количество зон; S - расстояние между зонами (количество разрядов сдвига); N - множество натуральных чисел. 2, Способ по п.1, о т л и ч а rani и и с я тем, что номера зон регулирования выбирают с учетом соотношений:
icAjf l | / иуи1 ;
(Hc
I
о UMCtte
-уГГ
Л
VAkc
/U(
q - I
/77-4
/--7
где V - номер зоны и номер группы
обрабатьгеаемых разрядов; диапазон возможных отклонений выходного параметра, например напряжения; /и - относительное отклонение выходного параметра для v-й зоны.
(Ги„ - нижняя граница j-fi зоны; . q - основание системы счисления .
0
,
сШм«ке ш
I у я 1,1.
Ike .тЛу-Я5 Г
где fl}y - шаг квантования для j-fi зоны.
г
г-5
фиг. 2
Uf8j
Зй
to
ю
iS M f6
re- f fff,. f 7
f7- M fff, frr-6, f-4
f i 6 д fO 11 ft is 17 ft J9 20 It у 25 n
tffue.S
