Изобретение относится к технике экспериментальной биологии и может использоваться в нейрофизиологических, ней- роэтологических, психофизиологических и психофармакологических исследованиях с целью изучения особенностей биоэлектрической активности отдельных нейронов поверхностных и глубоких структур головного мозга крупных, средних и мелких лабораторных животных в условиях свободного поведения.
Цель изобретения - обеспечение исследования особенностей биоэлектрической активности отдельных нейронов при естественном поведении исследуемого животного и снижение травматичности.
На фиг. I приведена конструктивная бхема микроманипулятора; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - элект- |1ическая схема пульта управления. : Микроманипулятор содержит держатель выполненный в виде полого стержня с 111аружной резьбой, внутри которого раз.ме- ijueH микроэлектрод 2. Держатель кине- 1|1атически связан шестерней 3 червячной г;1ередачи, червяк 4 которой через гибкий ал 5 соединен с приводом 6. Держа- т|ель 1 снабжен полым сферическим нако- ечником 7, размещенным в полости уста- йовочной втулки 8 с наружной резьбой Предназначенной для вкручивания в трепа- йационное отверстие в черепной кости. Шривод 6 закреплен на опорной штанге 9, которая также крепится к черепной кости. Глубина погружения микроэлектрода 2 задается с помопдью червячной передачи и контролируется узлом контроля глубины, в ыполненным в виде реостата 10, установленного параллельно микроэлектроду 2, и скрепленного с ним контактного ползуна 11, закрепленного на полом стержне.
Угол наклона микроэлектрода а задается фиксирующими винтами 12. Микроэлектрод крепится в держателе фиксатором 13.
Основная часть микроэлекхрода 2 находится внутри держателя 1 и расположена эксцентрично за счет пропущенной вдоль внутренней стенки канала уплотняющей вкладки, выпоненной, например, в виде шелковой нити 14. Для предотвращения и создания возможности только возвратно-поступательного осевого перемещения микроэлектрода направляющие штанги 15 пропущены через отверстия ограничительной планки 16.
Привод 6 в одном корпусе с одноступенчатым редуктором 17 через эластичные прокладки закреплен на подвижной муфте 18, которая свободно с возможностью вращательных и осевых движений насажена на ш тангу 9. На верхнем конце штанги 9 закреплена ответная часть разъема 19, электрически соединяющего элементы конструкции, закрепленные на черепе живот0
кого, с пультом управления, располагаю- щимся вне экспериментальной камеры.
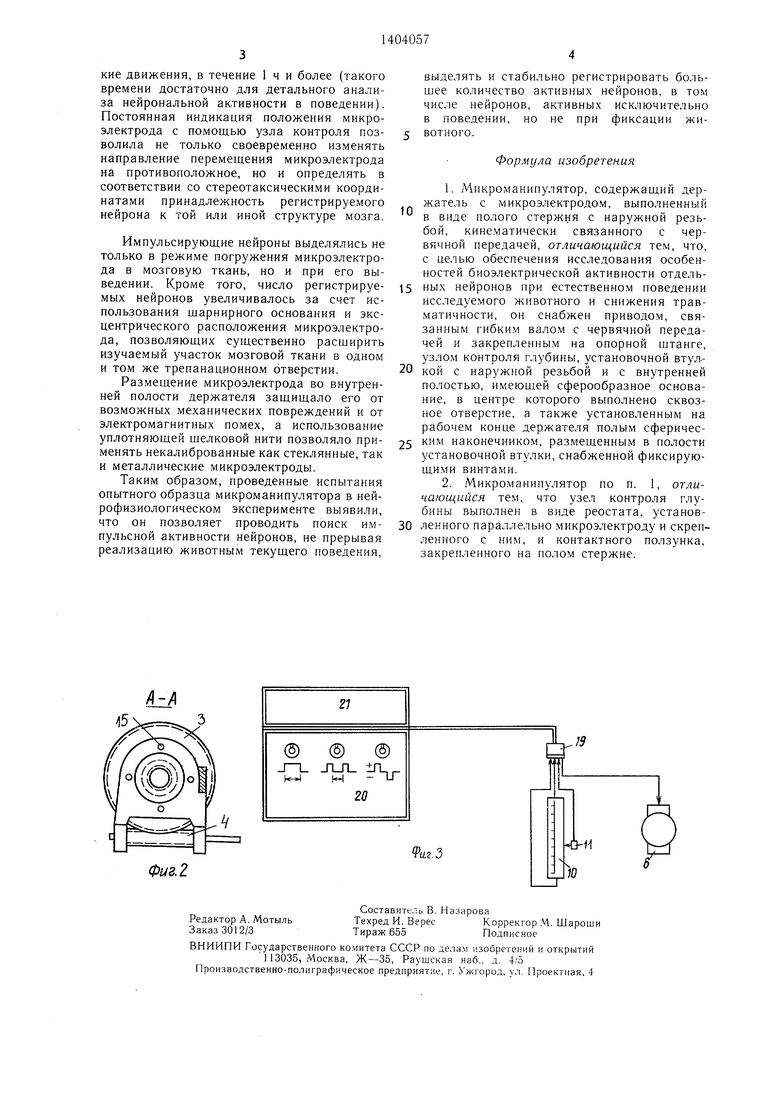
Пульт управления включает стандартный электростимулятор 20 с закрепленным на нем индикатором 21 глубины погружения микроэлектрода. Регулирование скорости, направления и шага перемещения микроэлектрода осуществляется изменением соответственно частоты, полярности и длительности электрических и,мпульсов электростимулятора, подаваемых на привод, выполненный в виде микроэлектродвигателя. Устройство работает следующим образом. Микроэлектрод 2 вводят в держатель 1 с уплотняющей нитью 14 и закрепляют
J фиксатором 13 в крайнем верхнем положении таким образом, что его регистрирующий кончик находится полностью внутри держателя 1. На нижний конец корпуса навинчивают наконечник 7 и всю конструкцию устанавливают во втулке 8
0 фиксирующими винтами 12 под требуемым углом наклона к поверхности черепа, а гибкий вал 5 сцепляют с выходным валом редуктора 17.
При подаче управляющих импульсов от
электростимулятора с пульта управления на микроэлектродвигатель возникающее усилие передается через редуктор 17, гибкий вал 5 на шестерню 3, которая, вращаясь по резьбе держателя микроманипулятора, перемещается вдоль оси корпуса и увлекает
д связанный с ней направ.тяющими штангами 15 через фиксатор 13 микроэлектрод 2. Направляющие штанги 15 перемещаются параллельно держателю и, таким образом, при определенном количестве оборотов д,вигателя происходит линейное перемещение
микроэлектрода 2 на соответствующую величину, а при остановке двигателя микроэлектрод фиксируется в определенном положении уплотняющей шелковой нитью 14. При перемещениях микроэлектрода происходит соответствуюидее перемещение рео0 статя 10 относительно ползунка 11, что приводит к изменению сопротивления электрической цепи, которое регистрируется на пульте управления индикатором 21 глубины погружения микроэлектрода.
д По достижении заданной глубины погружения микроэлектрода, переключив полярность управляюпдих импульсов на электростимуляторе, изменяют направление перемещения микроэлектрода на противоположное и продолжают поиск активных нейронов.
Q При возвращении микроэлектрода в исходное верхнее положение изменяют с помощью фиксирующих винтов 12 угол а и продолжают Исследование активности нейронов в другом участке мозга, не травмируя животного сверлением нового трепа5 национного отверстия, или перестановкой
опорного основания микроманицулятора.
Активность одного и того же нейрона
отводилась у животных, совершающих резкие движения, в течение 1 ч и более (такого времени достаточно для детального анализа нейрональной активности в поведении). Постоянная индикация положения микроэлектрода с помощью узла контроля позволила не только своевременно изменять направление перемещения микроэлектрода на противоположное, но и определять в соответствии со стереотаксическими координатами принадлежность регистрируемого нейрона к той или иной структуре мозга.
Импульсирующие нейроны выделялись не только в режиме погружения микроэлектрода в мозговую ткань, но и при его выведении. Кроме того, число регистрируемых нейронов увеличивалось за счет использования шарнирного основания и эксцентрического расположения микроэлектрода, позволяющих существенно расширить изучаемый участок мозговой ткани в одном и том же трепанационном отверстии.
Размещение микроэлектрода во внутренней полости держателя защищало его от возможных механических повреждений и от электромагнитных помех, а использование уплотняющей щелковой нити позволяло применять некалиброванные как стеклянные, так и металлические микроэлектроды.
Таким образом, проведенные испытания опытного образца микроманипулятора в нейрофизиологическом эксперименте выявили, что он позволяет проводить поиск импульсной активности нейронов, не прерывая реализацию животным текущего поведения.
0
выделять и стабильно регистрировать большее количество активных нейронов, в том числе нейронов, активных исключительно в поведении, но не при фиксации животного.
Формула изобретения
1. Микроманипулятор, содержацлий держатель с микроэлектродо.м, выполненный в виде полого стержня с наружной резьбой, кинематически связанного с червячной передачей, отличающийся тем, что, с целью обеспечения исследования особенностей биоэлектрической активности отдель5 ных нейронов при естественном поведении исследуемого животного и снижения трав- матичности, он снабжен приводом, связанным гибким валом с червячной передачей и закрепленным на опорной штанге, узлом контроля глубины, установочной втул.0 кой с наружной резьбой и с внутренней полостью, имеющей сферообразное основание, в центре которого выполнено сквозное отверстие, а также установленным на рабочем конце держателя полым сферичес5 КИМ наконечником, размещенным в полости установочной втулки, снабженной фиксирующими винтами.
2. Микроманипулятор по п. 1, отличающийся тем, что узел контроля глубины выполнен в виде реостата, установ0 ленного параллельно микроэлектроду и скрепленного с ним, и контактного ползунка, закрепленного на полом стержне.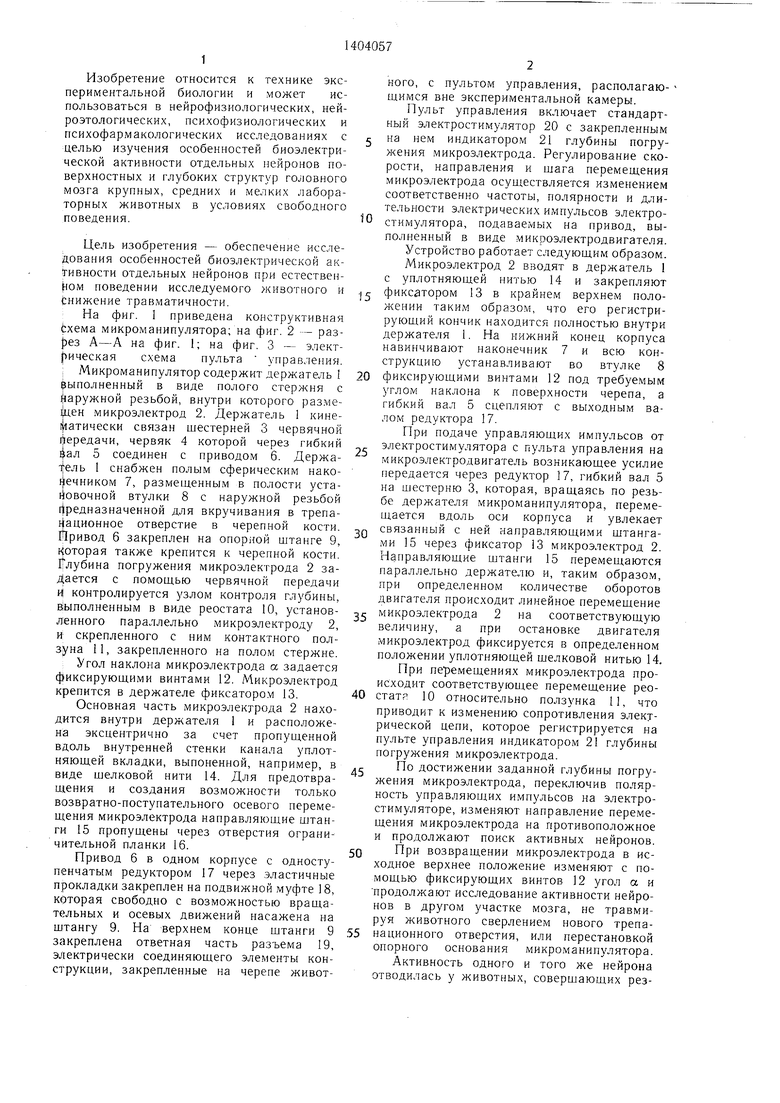
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1981 |
|
SU959753A1 |
| Микроманипулятор | 1974 |
|
SU492382A1 |
| МИКРОМАНИПУЛЯТОР | 1970 |
|
SU260077A1 |
| МНОГОКАНАЛЬНЫЙ ЭЛЕКТРОД С НЕЗАВИСИМЫМ ПЕРЕМЕЩЕНИЕМ МИКРОПРОВОДНИКОВ В ПУЧКЕ | 2009 |
|
RU2421253C1 |
| Микроманипулятор для биологических исследований головного мозга животного | 1976 |
|
SU582089A1 |
| Устройство для регистрации электрической активности клеток пульсирующих тканей | 1981 |
|
SU1012885A1 |
| МИКРОМАНИПУЛЯТОР для НЕЙРОФИЗИОЛОГИЧЕСКИХ | 1973 |
|
SU386627A1 |
| Микроманипулятор | 1987 |
|
SU1511106A1 |
| Способ многоканального отведения нейронной активности животного и устройство для его осуществления | 1980 |
|
SU935074A1 |
| Устройство для исследования нервныхгАНглиЕВ и СплЕТЕНий | 1978 |
|
SU831109A1 |
Изобретение относится к медицинской технике. Цель изобретения - обеспечение исследования особенностей биоэлектрической активности отдельных нейронов при естественном поведении исследуемого животного и снижение травматичности. Устройство содержит держатель 1, внутри которого размещен микроэлектрод 2. Держатель 1 кинематически связан шестерней 3 червячной передачи, червяк 4 У//////////////////////////////////////УУУ/Л которой через гибкий вал 5 соединен с приводом 6. Держатель 1 снабжен полым сферическим наконечником 7, размещенным в полости установочной втулки 8. Привод 6 закреплен на опорной щтанге 9, которая крепится к черепной кости. Глубина погружения микроэлектрода 2 задается с помощью червячной передачи и контролируется узлом контроля глубины, выполненным в виде реостата 10. Регулирование скорости, направления и шага перемещения микроэлектрода осуществляется изменением частоты, полярн ости и длительности импульсов электростимулятора, подаваемых на привод, выполненный в виде микроэлектродвигателя. Размещение микроэлектрода во внутренней полости держателя защищает его от механических повреждений и электромагнитных помех. 1 з.п. ф-лы, 3 ил. л S (Л 4 О 4 О СЛ 
21
Н
лл ±п
Фиг. 2
Ь
9ч. 3
Й-Я )0
| Микроманипулятор | 1980 |
|
SU880712A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
