(54) МИКРОМАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1974 |
|
SU492382A1 |
| Микроманипулятор | 1981 |
|
SU959753A1 |
| Микроманипулятор | 1987 |
|
SU1511106A1 |
| АТЕНТПО- 7i, ТЕХИИ^ЕСллЯ ^ БКЙЛИОТЕНА | 1970 |
|
SU275292A1 |
| Микроманипулятор | 1986 |
|
SU1404057A1 |
| УСТРОЙСТВО ДЛЯ ПРИВАРКИ СТЕРЖНЕЙ К ЭЛЕМЕНТАМ СОРТОВОГО ПРОФИЛЯ ПОД СЛОЕМ ФЛЮСА | 1969 |
|
SU251116A1 |
| Основный регулятор ткацкого станка | 1983 |
|
SU1152984A1 |
| УСТРОЙСТВО для ПРАВКИ ШЛИФОВАЛЬНОГО КРУГА | 1970 |
|
SU268933A1 |
| Полуавтомат для сборки пластинчатых магнитопроводов трансформаторов | 1983 |
|
SU1176395A1 |
| Устройство для опрессовки сердечника полюса электрической машины | 1988 |
|
SU1534646A1 |
I
Изобретение относится к микроманипуляторам преимущественно для нейрофизиологических исследований.
Известен микроманипулятор, содержащий храповой механизм, кинематически связанный с червячной передачей и держатель с микроэлектродом 1.
Недостатком известного микроман«пулятора является узость технологических возможностей, обусловленных тем, что шаг перемещения микроэлектрода осуществляется храповым механизмом и червячной передачей, с помощью которых невозможно достичь точности перемещения микроэлектрода на величину менее щага.
Цель изобретения - расширение технологических возможностей микроманипулятора.
Цель изобретения достигается тем, что микроманипулятор снабжен втулкой, жестко установленной на микроэлектроде, индукторами, сердечники которых смоитированы между держателем и втулкой, и стержнями, причем держатель и стержень выполнены из материала с различными коэффициентами линейного расширения.
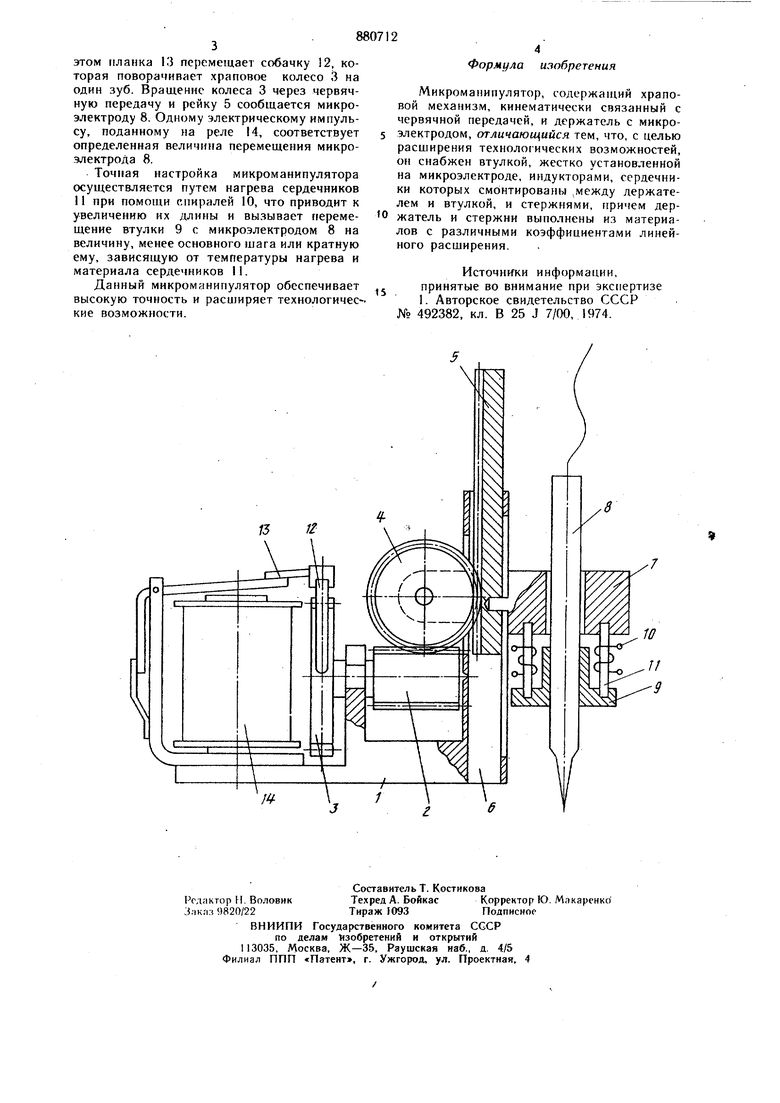
На чертеже изображен микроманипулятор, общий вид.
В корпусе 1 микроманипулятора смонтирована червячная передача, червяк 2, который жестко соединен с храповым колесом , 3, а червячное колесо 4 зацепляется с зубчатой рейкой 5. Последняя установлена в направляющей 6 корпуса 1 и соединена с держателем 7 микроэлектрода В. Микроэлектрод 8 установлен с возможностью свободного перемещения в осевом направлении 10 в держателе 7. На микроэлектроде жестко установлена втулка 9. Между держателем 7 и втулкой 9 смонтированы индукторы, состоящие из спиралей 10 и сердечников 11. При этом держатель 7 выполнен из термостойкого материала.
Храповое колесо 3 образует вместе с со15бачкой 12 и планкой 13 храповой механизм. Храповый механизм приводится в движение от элею-ромагиитного реле 14, якорь которого при прохождении тока через обмотки реле 41амагиичивается и притягивает план20ку 13.
Грубая настройка микроманипулятора осуществляется включением реле 14. При
этом планка 13 перемещает собачку 12, которая поворачивает храповое колесо 3 на один зуб. Вращение колеса 3 через червячную передачу и рейку 5 сообщается микроэлектроду 8. Одному электрическому импульсу, поданному на реле 14, соответствует определенная величина перемещения микроэлектроДа 8.
Точная настройка микроманипулятора осуществляется путем нагрева сердечников II при помощи спиралей 10, что приводит к увеличению их длины и вызывает перемещение втулки 9 с микроэлектродом 8 на величину, менее основного шага или кратную ему, зависящую от температуры нагрева и материала сердечников II.
Данный микроманипулятор обеспечивает высокую точность и расширяет технологические возможности.
Формула изобретения
Микроманипулятор, содержапшй храповой механизм, кииематически связанный с червячной передачей, и держатель с микроэлектродом, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен втулкой, жестко установленной на микроэлектроде, индукторами, сердечники которых смонтированы .между держателем и втулкой, и стержнями, причем держатель и стержни выполнены из материалов с различными коэффициентами линейиого расширения.
Источн1 ки информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 492382, кл. В 25 J 7/00, 1974.
