1
Изобретение относится к инструментам, используемым в экспериментальной биологии, а именно к микроманипуляторам дистанционного управления с шаговым погружением микроэлектродов в мозг животного с целью изучения нейронной (внутриклеточной и внеклеточной) активности.
Известен микроманипулятор, содержащий ходовые винты, штанги и привод в виде головок управления микроэлектродами 1.
Однако этот микроманипулятор не обеспечивает шаговой одновременной подачи нескольких микроэлектродов в мозг животного и, как результат, имеет малую вероятность попадания микроэлектрода в клетку, а значит и малую вероятность внутриклеточного отведения нейронной активности. Кроме того, в нем нет возможности одновременной регистрации внутри- и внеклеточной активности в различных слоях мозга, что в свою очередь не позволяет одновременно регистрировать широкое поле отводимых нотенциалов и сравнить одновременно иронсходяш,ие послойные процессы в различных (по глубине) слоях головного мозга.
Целью изобретения является отведение показаний нейронной активности с различных (по глубине) точек исследуемой зоны при наименьшей травме черепа.
Это достигается тем, что микроманипулятор снабжен электромагнитными муфтами в виде полу муфт, связанных посредством ходовых винтов с приводом, причем ходовые винты кинематически связаны со штангами, которые выполнены с возможностью изменения угла наклона. Кроме того, привод содержит шаговый двигатель с редуктором.
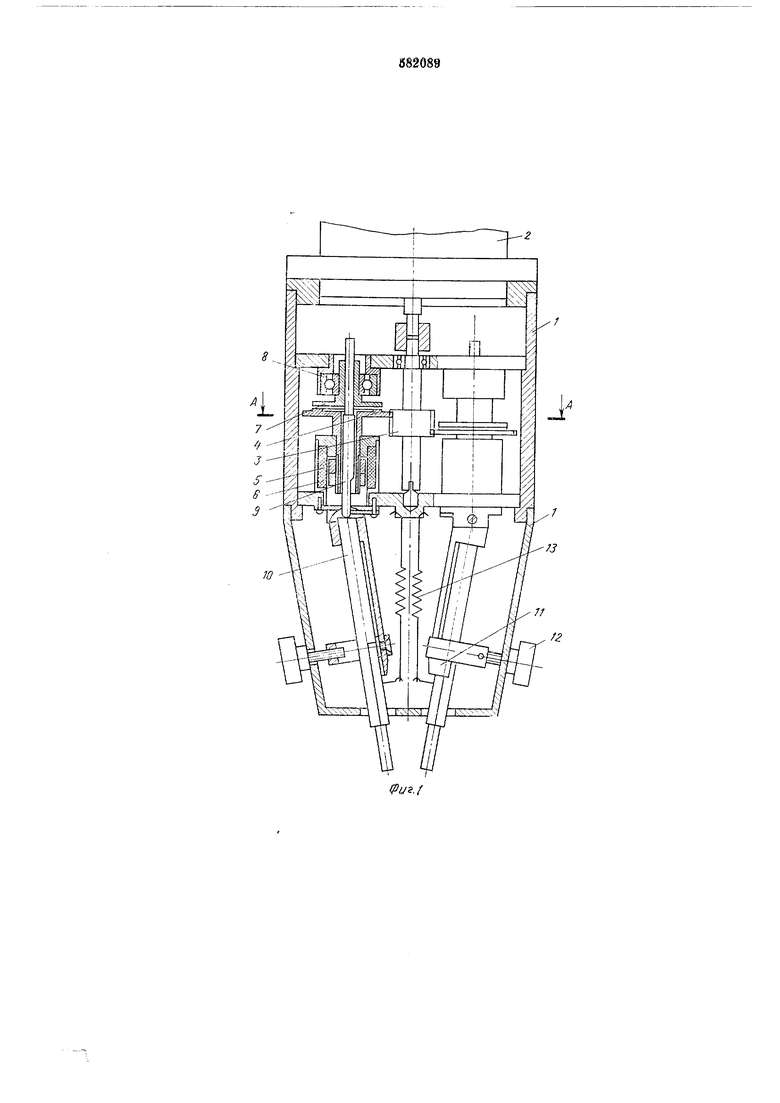
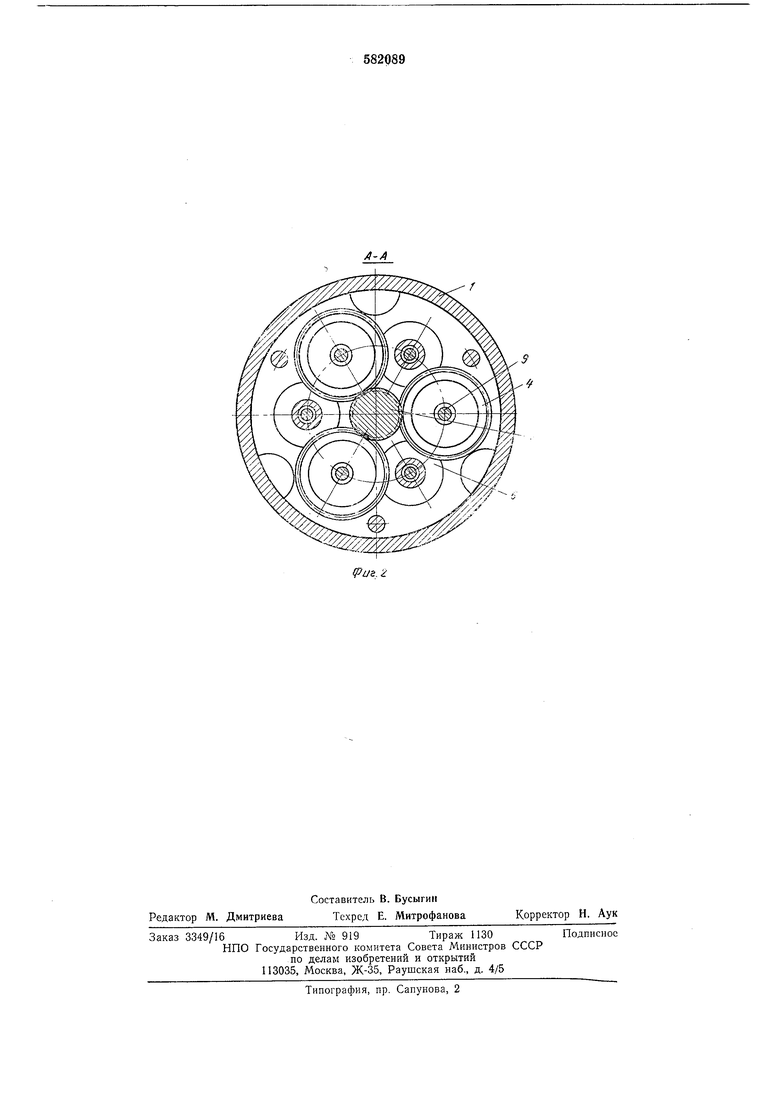
На фиг. I изображен предлагаемый микроманипулятор, разрез; на фиг. 2 - сечение по А-А на фиг. I.
Микроманипулятор включает составной сборный корпус 1, на верхнем фланце которого устаиовлси привод, содержаший шаговый двигатель 2, кинематически связанный с ведущей шестерней 3. Шестерня 3 находится в зацеплении с шестью ведомыми зубчатыми колесами 4, являющимися полумуфтами электромагнитной муфты. Полумуфты снабжены якорями 5, изготовленными из магнитомягкого материала и помещенными в корпуса соленоидов С, установленных на фланце кориуса 1. Верхние полумуфты 7, закрепленные в подшипники 8, являются ведущими гайками ходовых винтов 9, кинематически связанных со штангами 10. Призматические направляющие 11 штанг 10, шарнирно закрепленные на фланце корпуса 1, фиксируются регулировочными винтами 12 и возвратными пружинами 13. Вращение шагового
двигателя 2 через ведущую шестерню 3 передается ведомым зубчатым колесам 4, которые являются полумуфтами электромагнитной муфты.
Устройство работает следующим образом.
При подаче управляющего напряжения на один, выборочно-групповой, или все шесть соленоидов б якорь 5 поднимает нолумуфту (зубчатое колесо 4) и прижимает се к полумуфте 7 (ведущей гайке). Ведущая гайка, вращаясь в подшипнике 8, заставляет винт 9 двигаться поступательно вниз (вверх), толкая штангу 10. Штанга 10 движется в нанравляющих И, угол наклона к главной оси микроманипулятора которых регулируется винтом 12. Все возхможные люфты (вероятные зазоры) между регулировочнымн винтами 12 и корпусом 1, в винтовой паре регулировочного винта 12, меладу штангами 10 и направляющими 11, между штангами 10 и ходовыми винтами 9 устраняются натяжением возвратных пружин 13. При отсутствии управляющего напряжения на одной или нескольких электромагнитных муфтах ведомые зубчатые колеса 4, находящиеся в постоянном зацеплении с ведущей шестерней 3, будут находиться в нижнем положении и не будут передавать вращающий момент полу муфте 7. В результате этого ходовой винт 9 не будет перемещать штангу 10, а следовательно, и микроэлектрод, закрепленный на конце штока, будет находиться в фиксированном положении до прихода управляющего напряжения.
Прибор обеспечивает как прямой, так и обратный ход мнкроэлектродов.
Мнкромаиипулятор позволяет проводить электрофизиологнческие эксперименты по изучению нейронной активности но большинству методик, проводимых на обездвиженных животных, а в купе с блоком управления лозволяет автоматизировать процесс проведения эксперимента, давая возможность (помимо указаииых) экспериментатору, не входя в экспериментальную камеру, автоматически нроиЗВоднть смену микроэлектродов.
Микроманипулятор дает возможность: одновременной шаговой подачи всех (в данном случае шести) или автоматически выбранной группы микроэлектродов, что обеспечивает большую вероятность попадания микроэлектродов в нервную клетку, а значит и больплую
вероятность внутриклеточного отведения ней ронной активности;
одновременной регистрации внутри- и внеклеточной активности в различных слоях мозга животного, что позволяет одновременно регистрировать широкое поле отводимых потенциалов и сравнись одновременно происходящие послойные процессы в различных (по глубине) слоях головного мозга; одновременной регистрации взаимодействия на исследуемую клет; у соседних элемеитов, что дает возможиость одновременно регистрировать суммарные процессы, происходящие в локальной зоне;
в любой момент временн войти в исследуемую клетку под разным углом;
автоматической смены мнкроэлектрода, что позволяет автоматизировать процесс поочередной заменяемости микроэлектрода в случае выхода из строя предыдущего;
значительно увеличить вероятность ионадання всех или группы микроэлектродов в точно заданную зону;
одновременного и выборочно-группового ввода и вывода микроэлектродов, причем глубина погружения регистрируется дистанционно.
Формула изобретеиия
1.Микроманипулятор для биологических исследований головного мозга животного, содержащий ходовые винты, щтанги и привод, отличающийся тем, что, с целью отведения ноказаннй нейронной активности с различных (по глубине) точек исследуемой зоны при наименьшей травме черепа, он снабжен электромагнитными муфтами в виде полумуфт, связанных посредством ходовых винтов с приводом, причем ходовые винты кинематически связаны со штангами, которые выполнены с возможностью изменения угла наклона.
2.Микроманипулятор по п. 1, отличающийся тем, что привод содержит шаговый
двигатель с редуктором.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №260077, кл. В 25J 7/00, 1968.
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1986 |
|
SU1404057A1 |
| Микроманипулятор | 1981 |
|
SU959753A1 |
| МИКРОМАНИПУЛЯТОР | 1970 |
|
SU260077A1 |
| Микроманипулятор | 1974 |
|
SU492382A1 |
| Устройство для изучения биопотенциалов биологических объектов | 1979 |
|
SU930795A1 |
| УСТРОЙСТВО ДЛЯ ЛОКАЛЬНОГО ПОДВЕДЕНИЯ БИОЛОГИЧЕСКИ АКТИВНЫХ ВЕЩЕСТВ | 1995 |
|
RU2102750C1 |
| Микроманипулятор | 1987 |
|
SU1511106A1 |
| Микроманипулятор | 1980 |
|
SU905056A1 |
| Способ многоканального отведения нейронной активности животного и устройство для его осуществления | 1980 |
|
SU935074A1 |
| Держатель микроэлектрода | 1980 |
|
SU936905A1 |