Изобретение oтнocитJCЯ к медикобиологической технике, котораяиспользуртдя в экспериментальной биологии, а 1менно к микроманипуляторам для погружения мйкроэлектродов в мозг экспериментальных животных при их свободном поведении.
Известен микроманипулятор для нейрофизиологических исследований,содержащий винтовую передачу движения от привода к исполнительному органу, в качестве привода используется шаговый двигатель 1.
Известный ,микроманипулятор имеет большие габариты и вес и не может быть применен для установки на гоЛове экспериментального животного при микроэлектродных исследованиях в условиях свободного перемещения животного. При этом указанный микроманипулятор сложен в изготовлении и громоздок.
Наиболее близким к изобретению по технической сущности является , простой микроманипулятор для нейрофизиологических Исследований, содержащий электромагнитное реле, храповой механизм, червячную передачу, червяк которой связан с храповым колесом, а червячное колесо - с держателем микроэлектрода. Указанный микроманипулятор используется для дистанционного шагового погружения микроэлектродов в мозг экcпepимeн, тальных животных при их свободном поведении 2.
Однако при передвижении животного, находящегося в свободном поведении,
10 возможно повреждение микроэлектрода известного манипулятора, так как он механически не защищен. Кроме того, применение электромагнитного реле, которое близко расположено возле
15 электрически незащищенного от наводок микроэлектрода, вызывает помехи при отведении потенциалов головного мозга животных.
Центр тяжести микроманипулятора
20 сдвинут и не совпадает с направлением перемещения микроэлектрода к поверхности исследуемого объекта, что вызывает непредвиденную реакцию животного и помехи при исследовании 25 нейронов.
Указанные недостатки снижают надежность и качество проведения нейррфизиологическйх исследований. .
Целью изоЪретения является повышение надежности устройства и обеспечение точного проведения нейрофизиологических исследований.
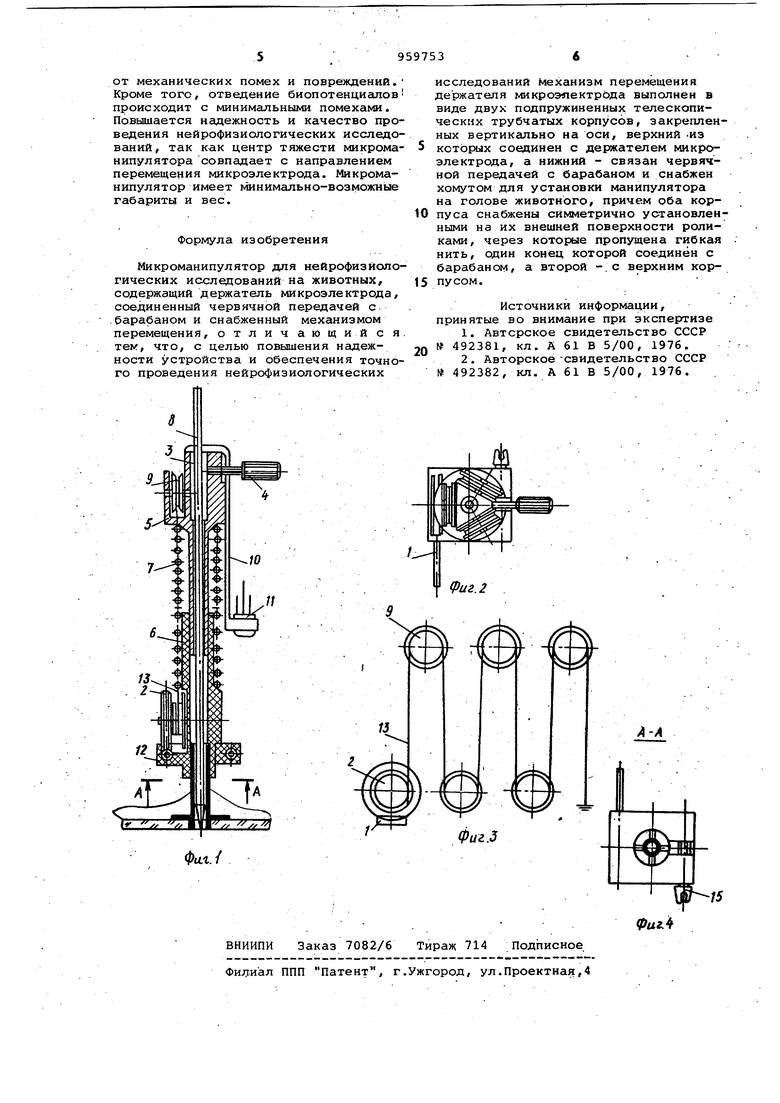
Для достижения цели в микроманипуляторе для нейрофизиологических исследований на животных, содержаще держатель микроэлектрода соединенны червячной передачей с барабаном и снабженный механизмом перемещения, механизм перемещения держателя микроэлектрода выполнен в.виде двух .подпружиненных телескопических трубчатых корпусов, закрепленных вертикально на оси, верхний из которых соединен с держателем и установлен свободно на оси, а нижний - с барабаном и снабжен хомутом для установки манипулятора на голове животного причем оба корпуса снабжены симметрично у1станозленными на их внешней поверхности роликами, через которые пропущена гибкая нить, один конец которой соединен с барабаном, а второй - с верхним корпусом.
На фиг 1 изображен предлагаемый микроманипулятор, общий вид в разрезе; на фиг. 2 - то же, вид сверху без кронштейна; на фиг. 3 - схема кинематического соединения верхнего и нижнего корпусов микроманипулятора на фиг. 4 - разрез А-А на фиг. 1.
Микроманипулятор содержит червячную передачу 1, червячное колесо с барабаном 2 держатель 3 микроэлектрода со стопорным винтом 4 и связывающий их механизм вертикального перемещения.
Механизм вертикального перемещения выполнен в виде двух корпусов верхнего 5 и нижнего б, подпружиненных пружиной 7. Верхний корпус 5 содержит держатель 3 микроэлектрода 8,. винт 4 для закрепления микроэлектрода, ролики 9 полиспастов, плату для псдпайки выводов, прикрепленную на кронштейне 10 к корпусу 5 при помощи винтов. На этом же кронштейне крепится полевой транзистор 11, служащий для усиления биопотенциалов, снимаемых с микроэлектрода 8.
Верхний корпус 5 смонтирован с возможностью свободного перемещения штоков по оси в нижнем корпусе 6, представляющем собой трубку, которая телескопически входит во внутрь соответствующей трубки нижнего корпуса б и служит направляющей для микроэлектрода 8. На нижнем корпусе б смонтированы червячная передача 1 и червячное колесо с 6aipa6aHOM 2, хомут 12 для закрепления микроманипулятора на голове экспериментального ЖИВОТНОГО и нижние ролики 9. Корпуса 5 и б связаны между собой гибкой нитью 13 (фиг. 3), пропущенной через ролики 9, которые расположены симметрично относительно держателя 3 микроэлектрода, при этом один конец нити закреплен на корпусе б, а вто|эой - на барабане 2 червячного колеса передачи. При работе с животными при их свободном поведении с целью изучения электрической активности нейронов головного мозга микроманипулятор, устанавливают на трубке 14 с помощью, хомута 12 и винта 15 (фиг. 1 и 4). Упомянутая трубка 14 предварительно вживается в кость черепа 16 экспериментального животного так, чтобы
0 ось микроэлектрода 8 располагалась над выбранным участком мозга.
Микроманипулятор работает следующим образом. .
Гибким тросиком (не показан) вращают червячную передачу 1, при этом барабан 2 поворачивается на определенный угол, а гибкая нить 13, закреплен. ная одним концом на барабане, наматывается на него и приводит в движение верхний корпус 5, сближая ролики полиспастов.
Верхний корпус 5. сжимает пружину 7 и. сам перемещаетсяпо направлению к нижнему корпусу 6. А так как микроэлектрод 8 жестко закреплен в корпусе 5, то сам микроэлектрод поступательно перемещается вниз.Таким образом кончик микроэлектрода 8 поступательно подводится к поверхности мо:зга. Регистрация момента прикосновения может осуществляться при помощи осциллографа или другой электронной аппаратуры. Последующее погружение микроэлектрода 8 в мозг животного осуществляется дальнейшим
5 вращением червячной перед1ачи 1. Электрический сигнал, усиленный полевым транзистором 11, подаётся на аппаратуру регистрации нейронной активности . ..
0 Размещение полевого транзистора 11 вблизи микроэлектрода 8 и их общий корпус, обеспечивает минимально возможную длину проводника соединяющего микроэлектрод с транзистором,
C и достаточную жесткость этого проводника, что уменьшает посторонние наводки и повышает точность отведения и регистрации электрической активности нейронов.
Расположение микроэлектрода 8 внутри трубки также исключает меха-, нические его повреждения.
При вращении червячной передачи в обратном направлении верхний корпус 5 под действием пружины 7 возвращается
5 в исходное положение, извлекая микроэлектрод из мозга животного. Таким образом, микроманипулятор позволяет как прямой, так и обратный код микроэлектрода..
0 ц Использование предлагаемого микроманипулятора, по сравнению с известным исключает возможность повреждения микроэлектрода при передвижении животных, так ,как в микроманипуляторе
5 предусмотрена защита микроэлектрода

| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1974 |
|
SU492382A1 |
| Микроманипулятор | 1986 |
|
SU1404057A1 |
| Микроманипулятор | 1980 |
|
SU880712A1 |
| Устройство для регистрации электрической активности клеток пульсирующих тканей | 1981 |
|
SU1012885A1 |
| УСТРОЙСТВО ФИКСАЦИИ ГОЛОВЫ ЛАБОРАТОРНЫХ ЖИВОТНЫХ | 2016 |
|
RU2629777C2 |
| Микроманипулятор | 1990 |
|
SU1806676A1 |
| МНОГОКАНАЛЬНЫЙ ЭЛЕКТРОД С НЕЗАВИСИМЫМ ПЕРЕМЕЩЕНИЕМ МИКРОПРОВОДНИКОВ В ПУЧКЕ | 2009 |
|
RU2421253C1 |
| Микроманипулятор для биологических исследований головного мозга животного | 1976 |
|
SU582089A1 |
| Электродное устройство | 1987 |
|
SU1438705A1 |
| Микроманипулятор | 1987 |
|
SU1511106A1 |
