(Л
СП
о:
Изобретение относится к экспериментальной биологии, а именно к микроманипуляторам с дистанционным управлением для шагового погружения микроэлектродов в мозг обездвиженного животного с целью изу чения нейронной активности.
Цель изобретения - повышение точности перемещения микроэлектродов при контролируемых , прямом и обратном ходах исполнительного органа микроманипулятора.
На фиг. 1 изображен микроманипулятор, разрез; на фиг. 2 - разрез А-А на фиг. 1.
Микроманипулятор содержит расположенный в корпусе электромагнит 1 с планкой 2 (якорем)., храповой механизм, состоящий из стержня 3 с закрепленным на нем коромыслом 4 (храповой собачкой), к которому прикреплены две пары зубьев 5, пружины 6, храпового колеса 7, а также шарики 8, опору 9, исполнительный орган, состоящий из винта 10 и держателя 11 микроэлектродов, электромагнит 12 с планкой 13 (якорем) для автоматического изменения направления движения исполнительного органа.
Микроманипулятор работает следующим образом.
При включении электромагнита 1 планка 2 перемещает стержень 3 с закрепленным на нем коромыслом 4 и с помощью одной пары прикрепленных к последнему зубьев 5 поворачивает храповое колесо 7, опирающееся через щарики 8 на опору 9, передавая движение винту 10 с закрепленным на нем держателе.м 1 t микроэлектродов. При отключении электромагнита 1 пружина 6, отталкиваясь от корпуса, возвращает стержень 3 в исходное положение, при этом храповое колесо 7 снова
поворачивается в ту же сторону. Многократным включением электромагнита 1 обеспечивают требуемый ход держателя 11 электродов в одну сторону. Автоматическое изменение направления движения исполнительного органа осуществляется при включении электромагнита 12, катушка которого перпендикулярна катушке электромагнита 1, а его планка 13, притягиваясь в сердечнику, поворачивает коромысло 4, подводя к
храповому колесу другую пару зубьев 5, поворачивающих храповое колесо в обратном направлении.
Требуемый ход держателя 11 микроэлектродов в обратную сторону обеспечивается
совместной работой электромагнитов 1 и 12. Прямой и обратный ходы исполнительного органа контролируются управляющими импульсами электромагнитов.
20
Формула изобретения
Микроманипулятор, содержащий корпус с опорой и направляющими, исполнительный орган, выполненный в виде держателя с микроэлектродами и расположенный
в направляющих корпуса, привод, выполненный в виде храпового механизма, собачка которого жестко связана со стержнем, подпружиненным относительно якоря основного электромагнита, а храповое колесо взаимодействует через шарики с опорой,
отличающийся тем, что, с целью повышения точности перемещения микроэлектродов при контролируемых прямом и обратном ходах исполнительного органа, он снабжен дополнительным электромагнитом, якорь которого жестко связан со стержнем, а катущка расположена перпендикулярно катушке основного электромагнита.
-A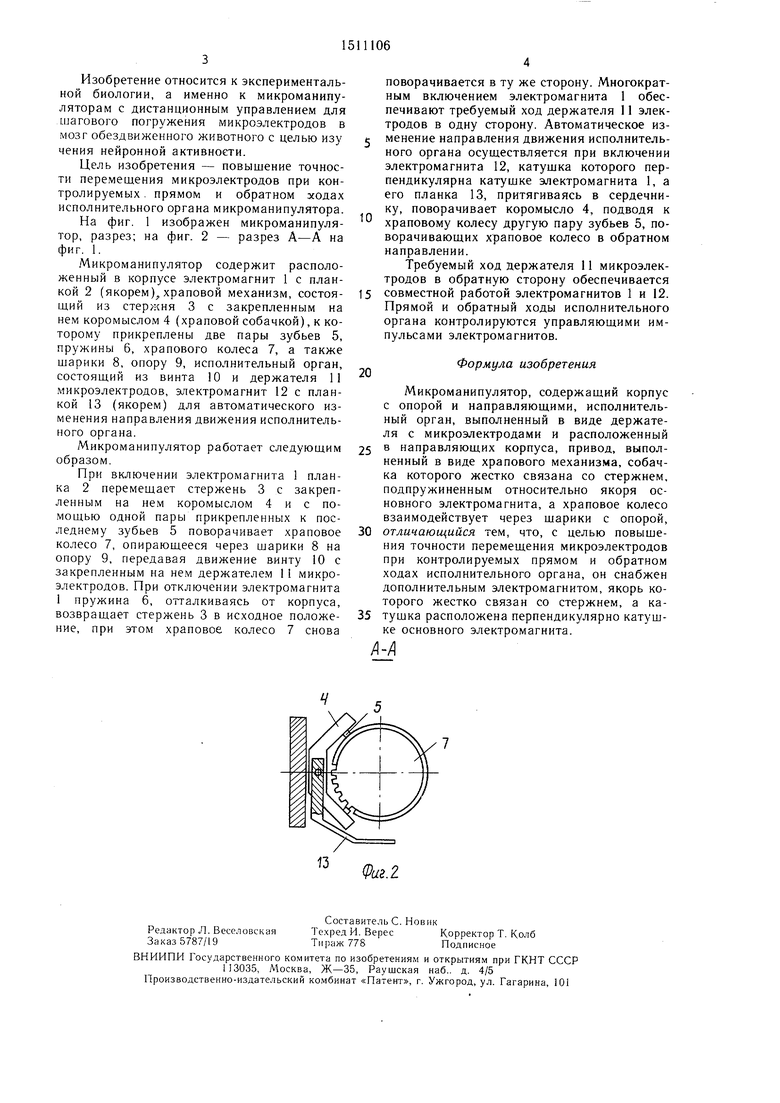
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1984 |
|
SU1219334A1 |
| Микроманипулятор | 1974 |
|
SU492382A1 |
| Микроманипулятор | 1980 |
|
SU880712A1 |
| АТЕНТПО- 7i, ТЕХИИ^ЕСллЯ ^ БКЙЛИОТЕНА | 1970 |
|
SU275292A1 |
| Микроманипулятор | 1981 |
|
SU959753A1 |
| Микроманипулятор для биологических исследований головного мозга животного | 1976 |
|
SU582089A1 |
| РОТОРНЫЙ МНОГОПОЗИЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1965 |
|
SU174683A1 |
| ПОВОРОТНО-УДАРНЫЙ МЕХАНИЗМ Б.Н.СТИХАНОВСКОГО (ВАРИАНТЫ) | 1995 |
|
RU2095234C1 |
| Электромагнитный перфоратор | 1986 |
|
SU1373805A1 |
| ЭЛЕКТРИЧЕСКАЯ ДУГОВАЯ ЛАМПА | 1928 |
|
SU16309A1 |
Изобретение относится к экспериментальной биологии, а именно к микроманипуляторам с дистанционным управлением для шагового погружения микроэлектродов в мозг обездвиженного животного с целью изучения нейронной активности. Цель изобретения - повышение точности перемещения микроэлектродов при контролируемых прямом и обратном ходах исполнительного органа. При включении электромагнита 1 стержень 3 с коромыслом 4 перемещается и с помощью одних зубьев поворачивает храповое колесо 7, передавая движение винту 10 с держателем 11 микроэлектродов. Автоматическое изменение направления движения исполнительного органа осуществляется при включении электромагнита 12. При этом коромысло 4 поворачивается, подводя к храповому колесу другие зубья, поворачивающие храповое колесо в обратном направлении. 2 ил.
Фиг. 2
| Микроманипулятор | 1984 |
|
SU1219334A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
