13
гч
Фиг.
Изобретение относится к подъемно- транспортному машиностроению, преимущественно к средствам обслуживания исполнительных механизмов грузоподъ- емных машин, и является усовершенствованием устройства по авт. св. № 1281475.
Цель изобретения - повышение точности и надежности работы устройства
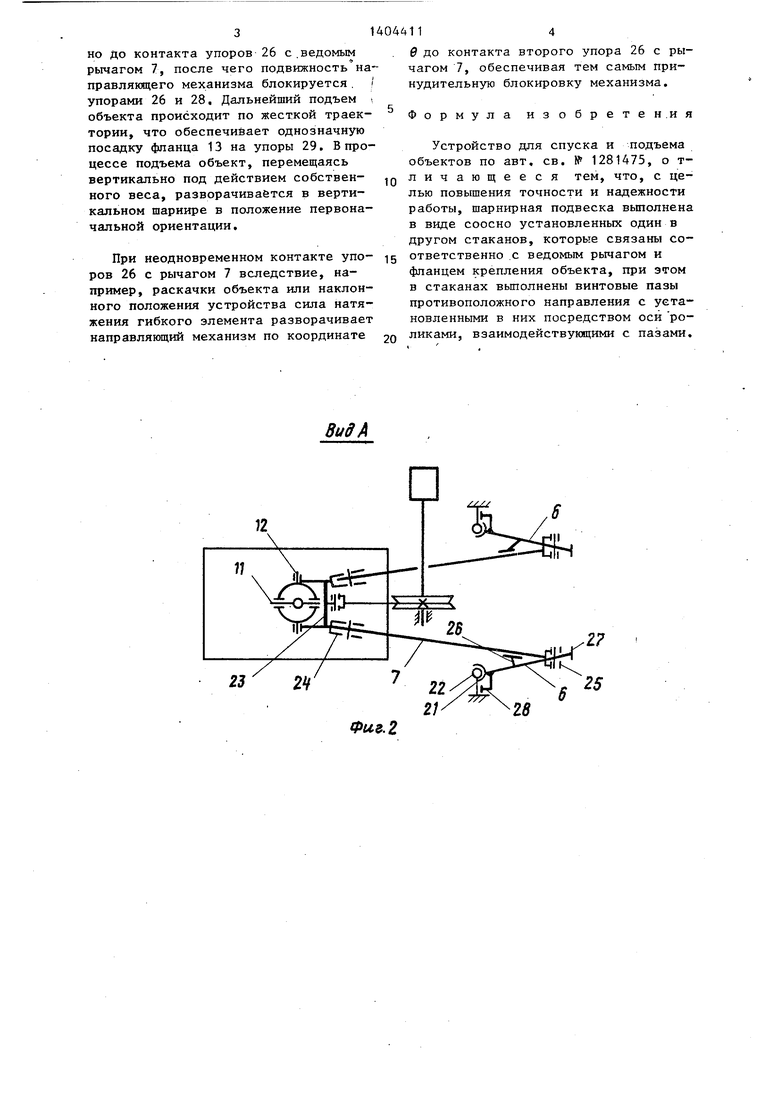
На фиг.1 показано устройство для спуска и подъема объектов; на фиг.2 - вид А на фиг.1 на фиг.З - сечение Б-Б на фиг.1; на фиг.4 - предлагаемое устройство, рабочее положение; на фиг.З - вид В на фиг.4.
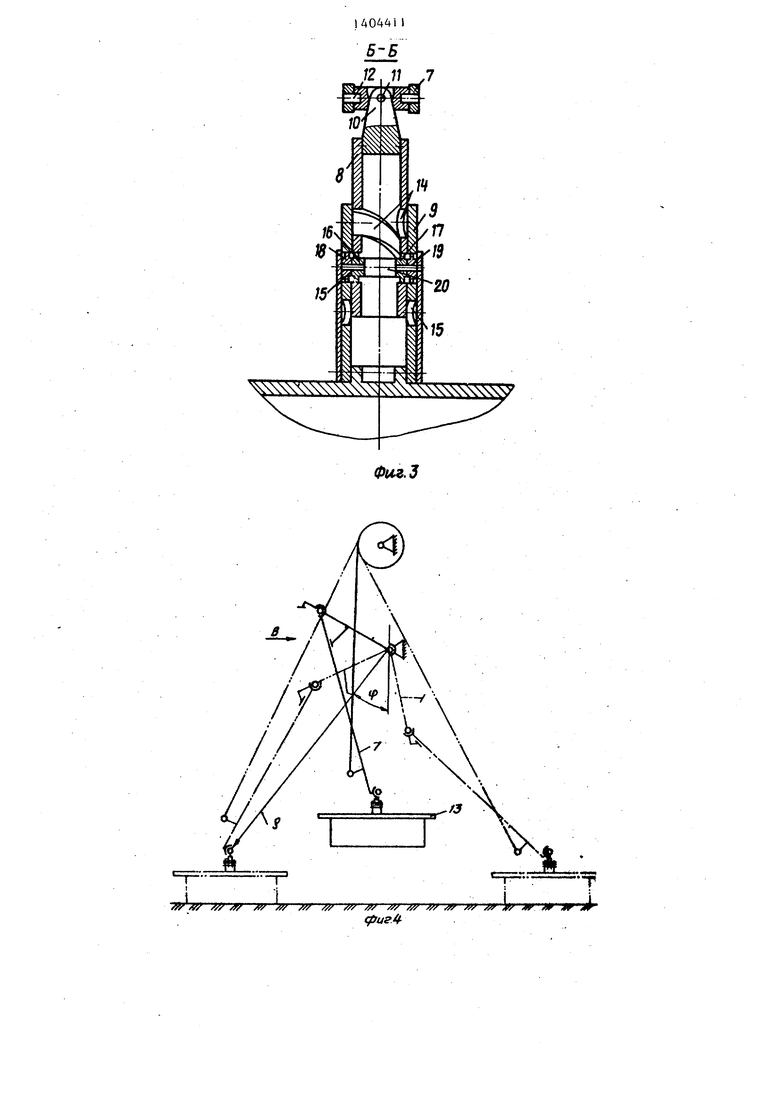
Устройство для спуска и подъема объектов содержит установленньй на основании 1 привод, включающий двигатель 2, на валу 3 которого закреплен барабан 4 с гибким элементом 5. Устройство содержит шарнирно-рычажный механизм с ведущими рычагами 6 и ведомым рычагом 7, а также шарнирную подвеску, связанную с приводом по- средством шарнирно-рычажного механизма, включающую вертикальный шарнир, выполненный в виде соосно установленных один в другом стаканов 8 и 9 (фиг.З), которые связаны соответ- ственно с ведомым рычагом 7 посредством вилки 10 шарниров 11 и 12 качания и с фланцем 13 крепления объекта 3 стаканах выполнены винтовые пазы 14 и 15 противоположного направления с расположенными в них роликами 16-19, установленными на оси 20, закрепленной в стаканах 8 и 9,
Оба ведущих рычага 6 соединены одними концами с установленными на основании 1 стойками 21 посредством трехстепенных шарниров 22. Ведомый рычаг 7 вьшолнен И-образным, соединен средней частью 23 с шарнирной подвеской, а ветвями - с ведущими рычагами 6 посредством последовательно установленных шарниров качания 24 и вращения 25. На каждом ведущем рычаге закреплены упоры 26-28.
Устройство работает следующим образом.
При включении двигателя 2 начинает вращаться барабан 4, сматывая гибкий элемент 5 и фланец 13 под действием собственного веса и веса закрепленного на нем объекта начинает движение в низ. Траекторию перемещения объекта определяет направляющий механизм, ко- торьй при опускании имеет одну сте
Q
0 5 о
г
5
0
0
5
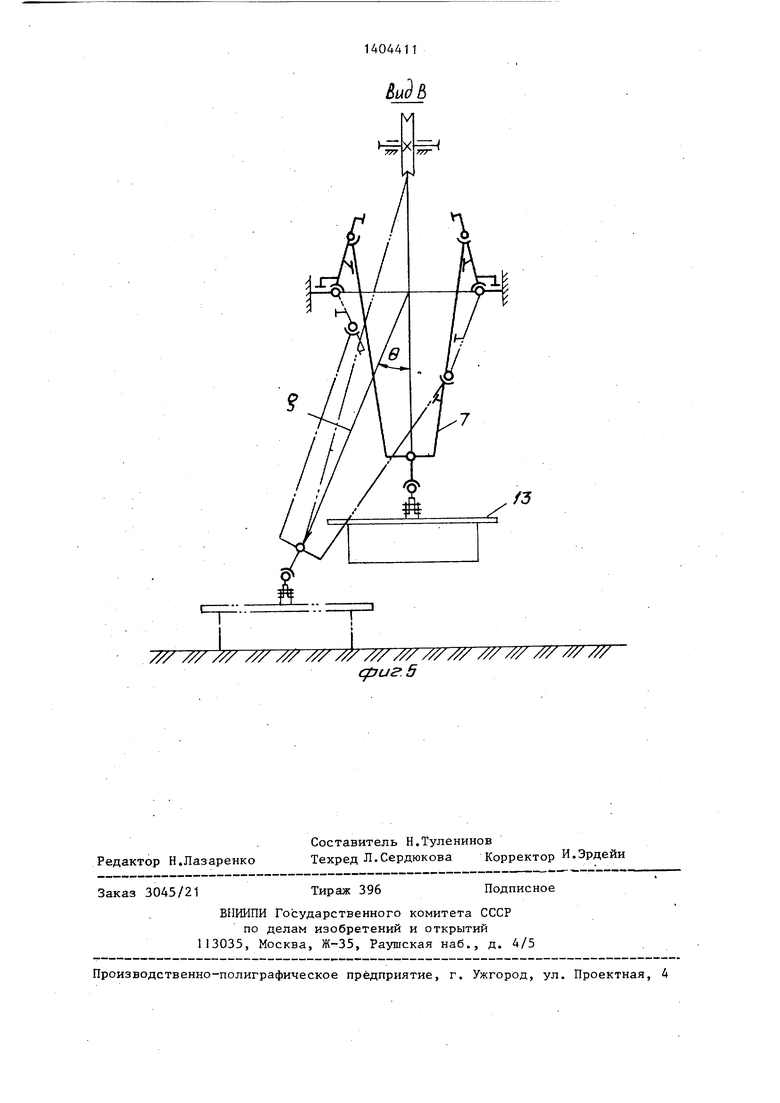
пень свободы по координате i. Когда ведомый рычаг 7 начинает отходить от упоров 26 (фиг,4 и 5), направляющий механизм получает подвижности по координате р за счет прокачки в шарнирах 25 и по координате 0 за счет перемещения в шарнирах 24, 25 и 22. Дальнейшее опускание объекта до грунта осуществляется на гибком элементе вертикально.
Перемещение объекта в пределах рабочей зоны производится, например, манипулятором, при этом шарниры 11 и 12 обеспечивают самоустановку объекта на грунте. Вертикальный шарнир обеспечивает возможность вращения объекта в любом направлении. При развороте фланца 13 с объектом против часовой стрелки ось 20, будучи неподвижной относительно наружного стакана 9, разворачивается вместе со стаканом 9 против часовой стрелки и поднимается вверх, при этом внутренние ролики катятся по винтовым пазам стакана 8. При этом объект запасает потенциальную энергию. При опускании объекта фланец 13 с объектом действием их собственного веса поворачивается по часовой стрелке, при этом ось 20 поворачивается вместе со стаканом 9 по часовой стрелке и опускается вниз в исходное положение. Объект, отдав потенциальную энергию, возвращается в исходное положение.
При развороте фланца 13 с объектом по часовой стрелке (вид на объект сверху) ось 20 остается неподвижной относительно внутреннего стакана, а стакан 9 поворачивается по часовой стрелке и поднимается вверх, при этом наружные ролики катятся по винтовым пазам стакана 9, Объект запасает потенциальную энергию. При опускании объекта фланец 13 с объектом под действием их собственного.веса поворачивается против часовой стрелки, при этом ось 20 остается неподвижной относительно внутреннего стакана, а стакан 9 поворачивается против часовой стрелки и опускается вниз в исг ходное положение. Объект, отдав потенциальную энергию, возвращается в исходное положение.
Для подъема объекта производится реверс двигателя, и гибкий элемент, наматываясь на барабан, подтягивает объект по грунту к центру рабочей зоны, а затем поднимает его вертикаль-
но до контакта упоров 26 с.ведомым рычагом 7, после чего подвижность направляющего механизма блокируется, / упорами 26 и 28. Дальнейший подъем объекта происходит по жесткой траектории, что обеспечивает однозначную посадку фпанца 13 на упоры 29. В процессе подъема объект, перемещаясь вертикально под действием собствен- ного веса, разворачивается в вертикальном шарнире в положение первоначальной ориентации.
При неодновременном контакте упо- ров 26 с рычагом 7 вследствие, например, раскачки объекта или наклонного положения устройства сила натяжения гибкого элемента разворачивает направляющий механизм по координате
/ Q
14044114
в до контакта второго упора 26 с рычагом 7, обеспечивая тем самым принудительную блокировку механизма.
Формула изобрете н.и я
Устройство для спуска и подъема объектов по авт, св. № 1281475, о т- личающееся тем, что, с целью повышения точности и надежности работы, шарнирная подвеска вьшолнена в виде соосно установленных один в другом стаканов, которые связаны соответственно .с ведомым рычагом и фланцем крепления объекта, при этом в стаканах вьшолнены винтовые пазы противоположного направления с установленными в них посредством оси роликами, взаимодействующими с пазами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для спуска и подъема объектов | 1984 |
|
SU1281475A1 |
| Устройство для спуска и подъема объектов | 1982 |
|
SU1082751A1 |
| Устройство для очистки и смазки гибких изделий | 1980 |
|
SU963934A2 |
| СИСТЕМА ЗАРЯЖАНИЯ АВТОМАТИЧЕСКОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2003 |
|
RU2231728C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| Ключ для свинчивания-развинчивания замковых соединений | 1987 |
|
SU1498904A1 |
| Тележка для канатных дорог | 1973 |
|
SU556071A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПРОВОЛОЧНЫХ ИЗДЕЛИЙ СЛОЖНОЙ КОНФИГУРАЦИИ | 1992 |
|
RU2050216C1 |
| УСТРОЙСТВО ДЛЯ СВАРКИ ПОЛИМЕРНЫХ МАТЕРИАЛОВ | 1995 |
|
RU2101180C1 |
| Устройство для отпирания замка крышки люка вагона | 1988 |
|
SU1579854A1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам для спуска и подъема объектов. Цель изобретения - повышение точности и надежности работы. Устройство содержит двигатель 2, на валу 3 которого закреплен барабан 4 с гибким элементом 5, шарнирно- рьиажный механизм с ведущими рычагами 6, ведомым рычагом 7, вертикальным шарниром, выполненным из соосно установленных один в другом стаканов с пазами, в которых расположены ролики. В процессе подъема объект, перемещаясь вертикально под действием . собственного веса, разворачивается в вертикальном шарнире в положение первоначальной ориентации. 5 ил.
ffuffA
12
Фиг. 2
or w7 fv f Wf f /«
Фиг.З
(риг
////////////////////////////////////////////////
(риг 5
Редактор Н.Лазаренко
Составитель Н.Туленинов
Техред Л.Сердюкова Корректор И.Эрдейи
Заказ 3045/21
Тираж 396
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Устройство для спуска и подъема объектов | 1984 |
|
SU1281475A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
