Јь 1
оэ кэ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Электрогидравлический усилитель | 1979 |
|
SU842231A1 |
| Следящая система | 1981 |
|
SU962847A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2020298C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
Изобретение может быть использовано в гидравлических приводах самоходных агрегатов. Цель изобретения - повышение точности следящей системы. Последовательно соединены электронный усилитель (У) 1 с температурно-зависимым коэффициентом усиления, первый сумматор (С) 2, У 3 мощности, электрогидравлический У 4 и исполнительный гидродвигатель 5. С задатчиком связан второй С 6. Датчики 7, 8 обратной связи по скорости и положению гидродвигателя 5 подключены к С 2, 6. Последовательно соединены с блоком 10 определения модуля компаратор 11, коммутатор 12, интегратор 13 и электронный У 14. Блок 10 связан с датчиком 7. Третий С 9 установлен на входе У 1 и соединен входами с выходом У 14 и выходом подключенного к коммутатору 12 С 6. Интегратор 13 включается только вблизи моментов реверса, что позволяет значительно снизить статическую составляющую ошибки, вызванную эксплуатационным уходом т-ры рабочей жидкости. 3 ил.
Фиг. 1
Изобретение относится к гидроавтоматике и может быть использовано в гидравлических приводах самоходных агрегатов.
Цель изобретения - повышение точности.
На фиг. 1 изображена схема электрогидравлической следящей системы; на фиг. 2 - схема электронного усилителя с температурно-зависимым коэффициентом усиления; на фиг. 3 - статическая характеристика электронного усилителя.
Система содержит последовательно соединенные первый электронный усилитель 1 с температурно-зависимым коэффициентом усиления, первый сумматор 2, усилитель 3 мощности, электрогидравлический усилитель 4 и исполнительный гидродвигатель 5 с двумя полостями (не изображены), а также связанные с датчиком (не изображен) второй сумматор 6, датчик обратной связи по скорости в виде тахогенератора 7 и датчик 8 обратной связи по положению. Тахогенератор 7 и датчик 8 подключены к сумматорам 2, 6 соответственно. Третий сумматор 9 установлен на входе усилителя 1. Блок 10 определения модуля соединен с тахогенерато- ром 7 и последовательно соединен с компаратором 11, коммутатором 12, интегратором 13 и вторым электронным усилителем 14 с температурно-зависимым коэффициентом усиления, причем сумматор 9 соединен входами с выходом усилителя 14 и с подключенным к коммутатору 12 выходом сумматора 6.
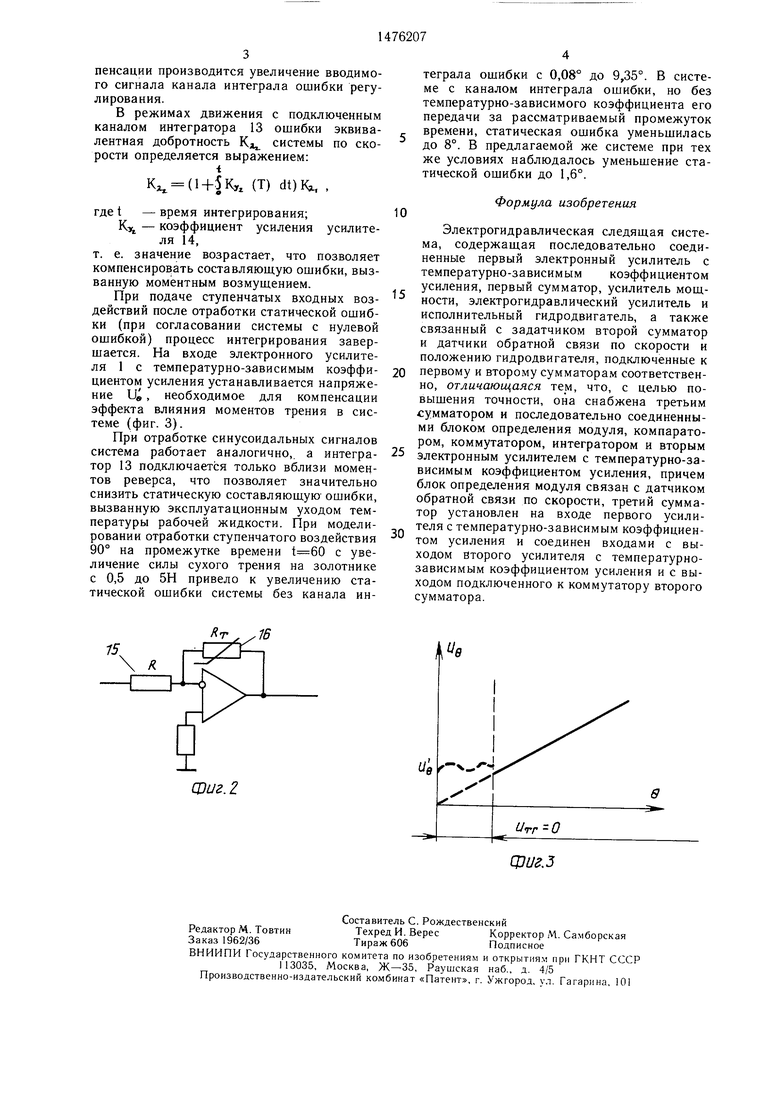
Усилитель 1 (14) имеет активное сопротивление 15 и термосопротивление 16 (фиг. 2), размещенное в канале нагнетания усилителя 4, включающего, например, электромеханический преобразователь, а также элемент сопло - заслонка, подключенный окнами к камерам управления золотника, рабочие окна которого подключены к полостям гидродвигателя 5 (не изображены). На фиг. 13 обозначены: в - сигнал ошибки; Ue- входной сигнал усилителя 1; Ug - значение сигнала, компенсирующего момент трения золотника усилителя 4 и гидродвигателя 5, напряжение тахогенератора 7.
Усилитель 1 (14) имеет коэффициент К (Т) усиления в виде:
K(T) 1 + RT(T)R
где Ri (Т) - величина переменного сопротивления 16;
R - величина сопротивления 15. Электрогидравлическая следящая система работает следующим образом.
При подаче задатчиком входного воздействия сумматор 6 вычисляет ошибку в регулирования, вычитая из входного сигнала сигнал датчика 8 обратной связи. Полу0
5
0
5
0
5
0
5
0
5
ченный сигнал ошибки через сумматор 9 поступает на электронный усилитель 1, зависимость коэффициента К-у, (Т) усиления которого от температуры рабочей жидкости выбирается обратной температурной зависимости коэффициента передачи Kv (Т) контура скорости, включающего сумматор 2, усилитель 3 мощности, электрогидравлический усилитель мощности 4, исполнительный гидродвигатель 5 и тахогенератор 7. Это позволяет стабилизировать добротность Кг, по скорости в условиях изменения температуры рабочей жидкости:
Кх,КУч (Т)- Kv(T)const.
В контуре скорости выходной сигнал электронного усилителя 1 на сумматоре 2 сравнивается с сигналом от тахогенератора 7. Полученное значение разности усиливается усилителем мощности 3 для управления электрогидравлического усилителя мощности 4.
Электромеханический преобразователь преобразует электрические сигналы от усилителя мощности 3 в пропорциональные этим сигналам смещения заслонки усилителя 4. Смещение заслонки из среднего положения приводит к изменению соотношения сечений рабочих окон элемента сопло - заслонка, а затем к возникновению перепада давления на золотнике. Золотник смещается в сторону из нейтрального положения, открывает свои рабочие окна, соединяющие одну полость исполнительного гидродвигателя 5 с нагнетанием, а другую - с сливом. Под действием давления рабочей жидкости гидродвигатель 5 перемещается со скоростью, пропорциональной величине смещения заслонки усилителя 4.
В режимах движения, характеризующихся возможностью появления больших значений статической составляющей ошибки, сигнал тахогенератора 7 близок к нулю. Выходной сигнал блока 10 определения модуля принимает малое неотрицательное значение, по низкому уровню (близкому к нулю) которого срабатывает компаратор 11, замыкая контакты коммутатора 12. Это приводит к подключению параллельно сигналу ошибки интегратора 13, на выходе которого накапливается потенциал с полярностью ошибки регулирования системы.
Выходной сигнал интегратора 13 усиливается вторым электронным усилителем 14, зависимость коэффициента передачи которого от температуры рабочей жидкости обратна зависимости коэффициента расхода дросселирующего окна золотника от температуры.
При снижении температуры величина моментов трения на золотнике электрогидравлического усилителя мощности 4 и гидродвигателе 5 повышается, и для их компенсации производится увеличение вводимого сигнала канала интеграла ошибки регулирования.
В режимах движения с подключенным каналом интегратора 13 ошибки эквивалентная добротность Кд системы по скорости определяется выражением: t
Kai (l+jK,, (T) dOKst, ,
где t - время интегрирования;
К - коэффициент усиления усилителя 14,
т. е. значение возрастает, что позволяет компенсировать составляющую ошибки, вызванную момёнтным возмущением.
При подаче ступенчатых входных воздействий после отработки статической ошибки (при согласовании системы с нулевой ошибкой) процесс интегрирования завершается. На входе электронного усилителя 1 с температурно-зависимым коэффициентом усиления устанавливается напряжение Ue , необходимое для компенсации эффекта влияния моментов трения в системе (фиг. 3).
При отработке синусоидальных сигналов система работает аналогично,, а интегратор 13 подключается только вблизи моментов реверса, что позволяет значительно снизить статическую составляющую ошибки, вызванную эксплуатационным уходом температуры рабочей жидкости. При моделировании отработки ступенчатого воздействия 90° на промежутке времени с увеличение силы сухого трения на золотнике с 0,5 до 5Н привело к увеличению статической ошибки системы без канала инКг , /75
15,
фиг. 2
теграла ошибки с 0,08° до 9,35°. В системе с каналом интеграла ошибки, но без температурно-зависимого коэффициента его передачи за рассматриваемый промежуток времени, статическая ошибка уменьшилась до 8°. В предлагаемой же системе при тех же условиях наблюдалось уменьшение статической ошибки до 1,6°.
Формула изобретения
5
0
Электрогидравлическая следящая система, содержащая последовательно соединенные первый электронный усилитель с температурно-зависимым коэффициентом усиления, первый сумматор, усилитель мощности, электрогидравлический усилитель и исполнительный гидродвигатель, а также связанный с задатчиком второй сумматор и датчики обратной связи по скорости и положению гидродвигателя, подключенные к первому и второму сумматорам соответственно, отличающаяся , что, с целью повышения точности, она снабжена третьим сумматором и последовательно соединенными блоком определения модуля, компаратором, коммутатором, интегратором и вторым 5 электронным усилителем с температурно-зависимым коэффициентом усиления, причем блок определения модуля связан с датчиком обратной связи по скорости, третий сумматор установлен на входе первого усилителя с температурно-зависимым коэффициентом усиления и соединен входами с выходом второго усилителя с температурно- зависимым коэффициентом усиления и с выходом подключенного к коммутатору второго сумматора.
0
| Разинцев В | |||
| И | |||
| Электрогидравлические усилители мощности | |||
| М.: Машиностроение, 1980, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU102A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
