4 О О1
о со
со
14)
Изобретение относится к электротехнике, может быть использовано при сборке электрических соединителей в радиотехнической и других отраслях промышленности и является усовершенствованием известного устройства по авт. св. № 1112457.
Целью изобретения является упрощение конструкции контрольного устройства.
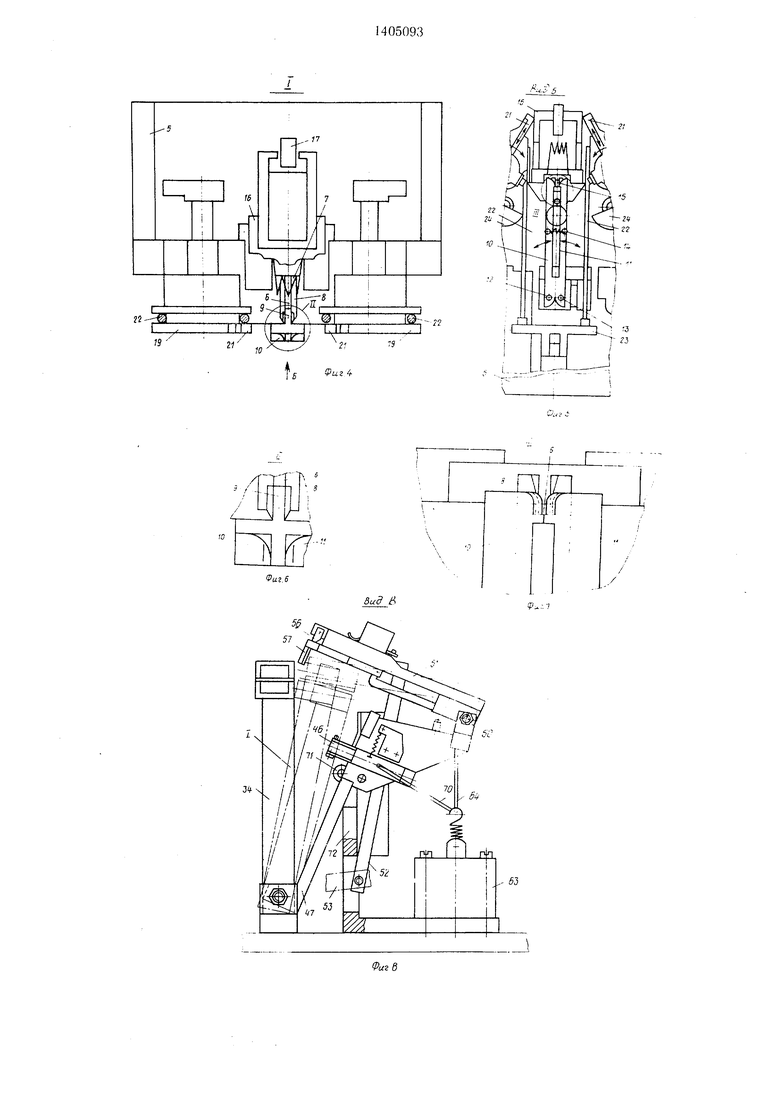
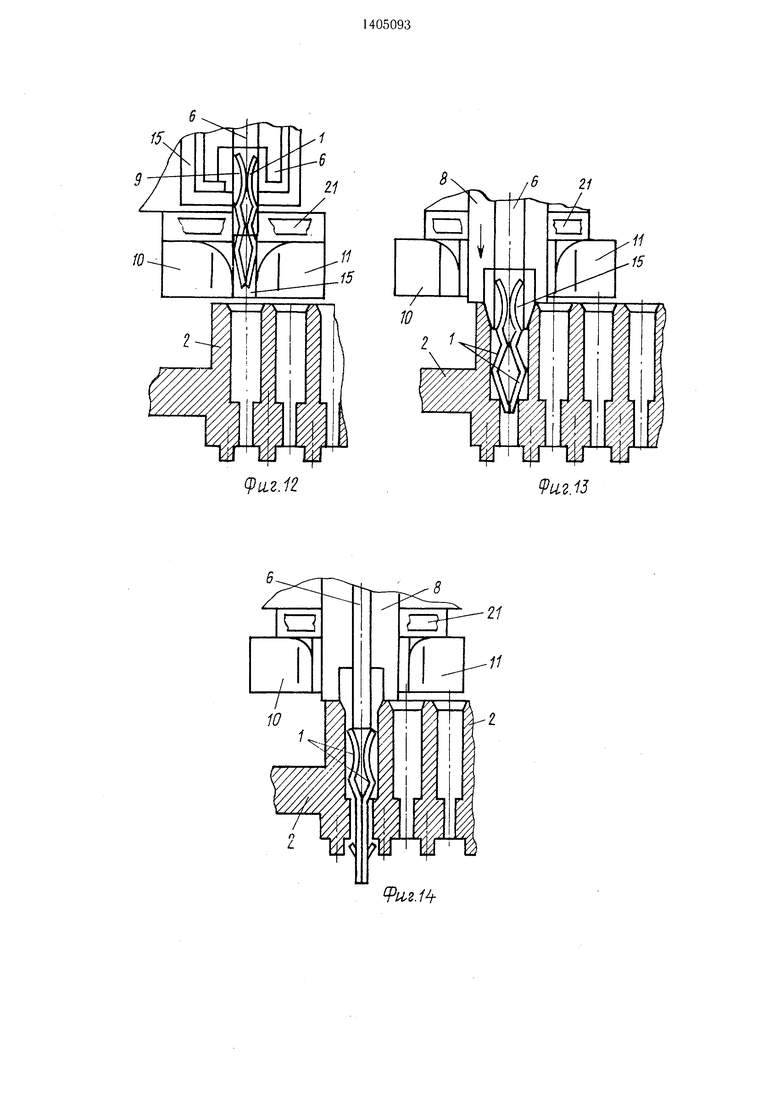
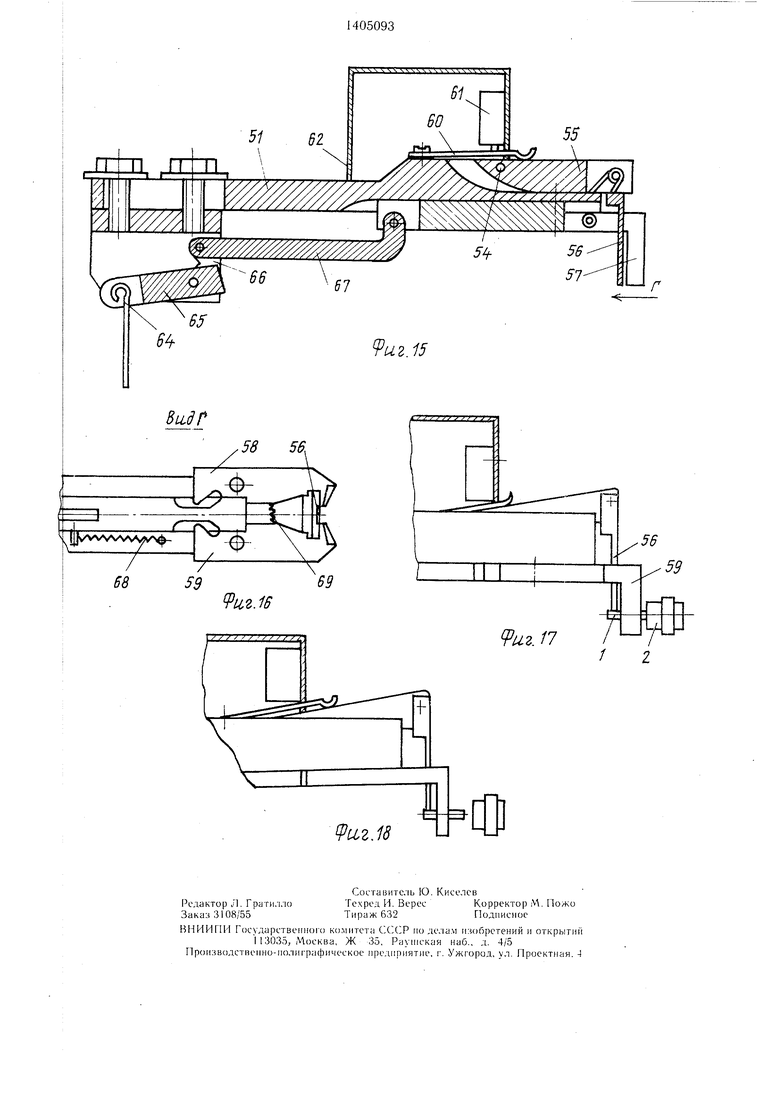
На фиг. 1 представлено устройство, общий вид; вид сверху; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - устройство, вид сзади; на фиг. 4 - узел I на фиг. 1; на фиг. 5 - вид Б на фиг. 4; на фиг. 6 - узел И на фиг. 4; на фиг. 7 - узел III на фиг. 5; на фиг. 8 - вид В на фиг. 1; на фиг. 9-14 - схема движения контактов от накопителя в гнездо колодки соединителя; на фиг. 15 - планка с щупом,захватом контрольного устройства, микропереключателе.м; на фиг. 16 - вид Г на фиг. 15; на фиг. 17 п 18 - работа щупа и захвата планки контрольного устройства.
Устройство сборки (фиг. 1-3) пружип- пых контактов 1 в гнезда колодки 2 соединителя состоит из следующих узлов: накопителя, отсекателя, узла вторичной ориентации, механиз.ма перемещения па niar колодки 2 соединителя и коптроля забивки коптактов в гнездо колодки, привода 3, ку- .пачкового вала 4.
Узел вторичной ориентации (фиг. 1, 2, 4 и 5) смоптировап на кропп1тейпе 5 и выпол- неп в виде толкателя 6 с установленной в пе.м подпружиненной посредством пружины 7 направляющей 8, выполненной в виде вилки с пазом 9, боковые по- вер.хности которого в верхней части выпол- кепы cкoпJeнными; направляющей опоры, вы- полнеппой в виде двух рычагов 10 и 1, устаповле1П1ых па осях 12 и 13 с возможностью качательного движения, соеди- пенны.х между собой пружиной 14 и образующих в сведенном положении паз 15 (фиг. 6 и 7) со скощенными боковыми поверхностями в верхней части и фиксаторы 16 положения контактов 1.
Передняя часть направляющей 8 выполнена по фор.ме заходной части большего прямоу1 ольпого гнезда колодки 2, высота и пирина толкателя 6 меньше высоты и щири- ны гнезда колодки 2.
Паз 9 направляющей 8 и наз 15 направляющей опоры образуют приемный паз ц ириной меньшей большего пря.моугольного гнезда колодки 2.
Толкатель 6 связан с кулачковым валом 4 посредством тяги 17.
Фиксатор 16 установлен с возможностью качательного движения соосно приемному пазу (пазам 9 и 15) над ним, между передней частью направляющей 8 и направляющей опорой, и связан с кулачковым валом 4 тягой 18.
Па этом же кронщтейне 5 симметрично приемному пазу смонтированы манипулято0
5
0
5
0
5
0
5
ры, выполненные в виде корпусов 19, в пазу которых установлены с возможностью возвратно-поступательного перемещения подпружиненные пружинами 20 зажимы 21 (фиг. 2-5). Управление движением манипуляторов от накопителя (фиг. 11) к приемному пазу узла вторичной ориентации производится посредством подпружиненных тросов 22, закрепленных одним концом па корпусе 19, а другим - на тяге 23, связанной с кулачковым валом 4. Управление движением зажимов 21 осуществляется посредством пружин 20, поворотного кулачка 24, закрепленного на тяге 25, связанной с кулачковым валом 4.
Симметрично приемному пазу установлен накопитель, выполненный в виде планок 26, пазы 27 которых расположены в одной вертикальной плоскости во встречпо.м направлении (фиг. 1-3). На конце планок 26 на расстоянии, равном половине ширины контакта 1, расположены подпружиненные пру- жипой 28 прижимы 29 контактов 1. Прижимы 29 связаны с рычага.ми 30. Планки 26 закреплены на основании 31 посредством пружин 32. На основании 31 закреплены электромагниты 33, которые совместно с пружинами 32 предназначены для создания вибраций планкам 26.
Таким образом, корпуса 19 манипуляторов совместно с зажимами 21, ирижи.мами 29 образуют отсекатель контакта 1 .из соответствующего паза 27 планок 26.
Соосно приемному пазу узла вторичной ориентации установлен кронн тейн 34 (фиг. I и 3) с возможностью качательного движения, связанный с кулачковым валом 4 тягой 35.
На кpoннJтeйнe 34 с.монтированы направляющая 36 с подвижным основание.м 37, снабженным пазами 38, в которое устанавливается колодка 2, рычаг 39 на оси 40, упоры 41 и 42. Па одном конце рычага 39 на его оси 43 установлен толкатель 44, рабочий конец которого расположен в пазу 38 подвижного основания 37, на друго.м - ролик 45 для передачи движения толкателю 44 при скольжении по подпружиненной наклонной плоскости 46, прикрепленной к кронштейну 47.
Пружина 48 служит для постоянного поджатия толкателя 44 к пазу 38, а пружина 49 - для возвращения рычага 39 в исходное положение.
Упор 41 служит для начального положения толкателя 44, а упор 41 - для конечного.
К кронштейну 47 с возможностью качания на оси 50 закреплен исполнительный механизм, выполненный в виде планки 51 контрольного устройства, кинематически связанной системой рычагов 52 и 53 с кулачковым валом. На планке 51 в ее пазу на оси 54 закреплен щуп 55, рабочий конец 56 которого подпружинен к захвату 57 и выполнен с возможностью качания. Захват 57 также закреплен на планке и выполнен в виде пружинных щин- чиков с губками 58 и 59. Пружина 60 одним концом закреплена к планке 51, а другим прижимает щуп 55 в пазу планки и служит для передачи сигнала через микропереключатель 61, электромагнит на привод захвата и наклонную плоскость 46. Микропереключатель 61 закреплен к кожуху 62 над пружиной 60.
Привод захвата 57 состоит из электромагнита 63, тяги 64, системы рычагов 65 и 66 и ползуна 67, один из концов которого расположен между губками 58 и 59, причем их контактирующие части выполнены конусными. Для возврата губок 58 -и 59 в исходное положение служит пружина 68, закрепленная одним концом к ползуну 17, а другим -- к захвату 57 и пружине 69, закрепленной между губками.
Щуп служит для проверки глубины заталкивания контактов в гнездо изолятора. Захват служит, для удаления контактов, вошедших не на всю глубину в гнездо изолятора.
Электромагнит 63 тягой 70 связан с подпружиненной наклонной плоскостью 46. Ми- кро 1ереключатель 71 установлен на стойке 72 с воз.можностью взаимодействия с кронштейном 34 и подает сигнал на отключение электромагнита 63.
При включении привода 3 кулачкового вала 4 (фиг. 1,2, 3 и 9) зажи.мы 21 под действием тяги 25, поворотных кулачков 24, перемешаясь в пазах корпусов 19, образуют паз а, который является продолжением пазов 27, прижимы 29 под действием поворотных кулачков 24 и рычага 30 занимают крайнее верхнее положение, освобождая в пазах 27 контакты 1, которые под действием вибрации, создаваемой планкам 26 электромагнитами 33 совместно с пружинами 32, перемещаются. Происходит переход по одному контакту соответственно из каждого паза 27 планки 26 в паз а, образованный корпусом 19 и зажимом 21. При возвращении кулачка 24 в исходное положение прижим 29 перемещается в крайнее положение (фиг. 9) под действием пружины 28 и удерживает последующий контакт 1, предохраняя накопленные контакты от выпадания из паза 27, а зажим 21, стремясь возвратиться также в исходное положение под действием .пружины 20, осуществляет зажим контакта 1 в пазу а.
Под действием подпружиненной тяги 22 и тяги 23 манипуляторы переносят зажатые контакты (фиг. 2, 3, 4 и 10) от накопителя в приемный паз узла вторичной ориентации, осуществляя их складывание. Под действием тяги 18 начинает опускаться фиксатор 16 положения контактов со скоростью больщей, чем скорость перемещения манипуляторов с контактами 1, и при
5
подходе последних к приемному -пазу узла вторичной ориентации фиксатор Hi дс)1Ч)няет манипу.чяторы с контактами I н в да.чь- нейшем поворот мапипуляторов осуществляется за счет перемеп ения фиксатора 16 Контакты I (по одно.му н каждсш мани- нуляторе), скользя по сконгенной пове|)х- ности приемного паза, прижи.маются друг к другу, сжимаются в размер меньше бо,-|ьше- го прямоугольного гнезда ко, 1Одки и ук,:1ады- 0 ваются в него на дно назов 9 и 15 (фиг. 11). при этом фиксатор 16 предохраняет контакты 1 от вьщадания из паза а (потери ориентации).
При дальнейшем опускании вниз (кран- нее нижнее положение) .манипуляторов нод действием подпружиненной тяги 22 и тяги 23 контакты 1 освобождаются из паза а и окончательно укладываются в приемном пазу, фиксируясь в нем за счет своих унру- гих свойств и фиксатора 16 (фиг. II). 0 rioc. ie этого фиксатор 16 под действием тяги 18 поднимается вверх, возвращаясь в исходное ноложение (не показано), а толкатель 6, направляющая 8 совместно с y. io- женной в пазах 9 и 15 нарой контактов под действием тяги 17 (фиг. 12) перемещаются к гнезду колодки 2. При подходе направляющей 8 к рычагам И) и II передняя часть раздвигает последние, заходит вместе с прижатыми друг к другу контактами в большее прямоугольное гнездо 0 колодки 2 и, упираясь в колодку 2, останавливается (фиг. 2), а толкатель 6, продолжая перемещаться, осуществляет по;щый ввод в колодку 2 контактов I, которые фиксируются в меньшем прямоугольном гнезде колодки 2 (фиг. 13). 1осле фикса- 5 ции пары контактов I в гнезде колодки 2 толкатель 6 с направляющей 8 нод действием пружины 7, рычаги 10 и 11 нод действием пружины 14 и .манипуляторы под действием подпружипенных тяг 22 и 23 занимают исходное положение, а кронн1тейн 34 0 перемещается под действием тяги 35, совершая качательное движение от приемного паза узла вторичной ориентации к контрольной позиции I (фиг. 8). В коп- трольной позиции I под действием рычагов 52 и 53 от кулачкового вала планка опускается.
Если контакты нолностью забились в гнездо колодки изолятора, то щуп пройдет мимо изолятора и никакие сигналы не поступят на захват и механизм переме- Q щения колодки иа таг. Кронштейн 34, продолжая перемещаться из положения I в положение II роликом 45 наедет на подпружиненную наклонную плоскость 46. Последняя, воздействуя на ролик 45, поворачивает рычаг 39 относительно оси 40, 5 пружина 49 растягивается и посредством оси 43 передается движение толкателю 44, который, упираясь в па.; 38 подвижного основания 37, перемещает его на таг вмес5
те с колодкой 2, соосно приемному пазу располагается незаполненное гнездо колодки 2 (фиг. 3).
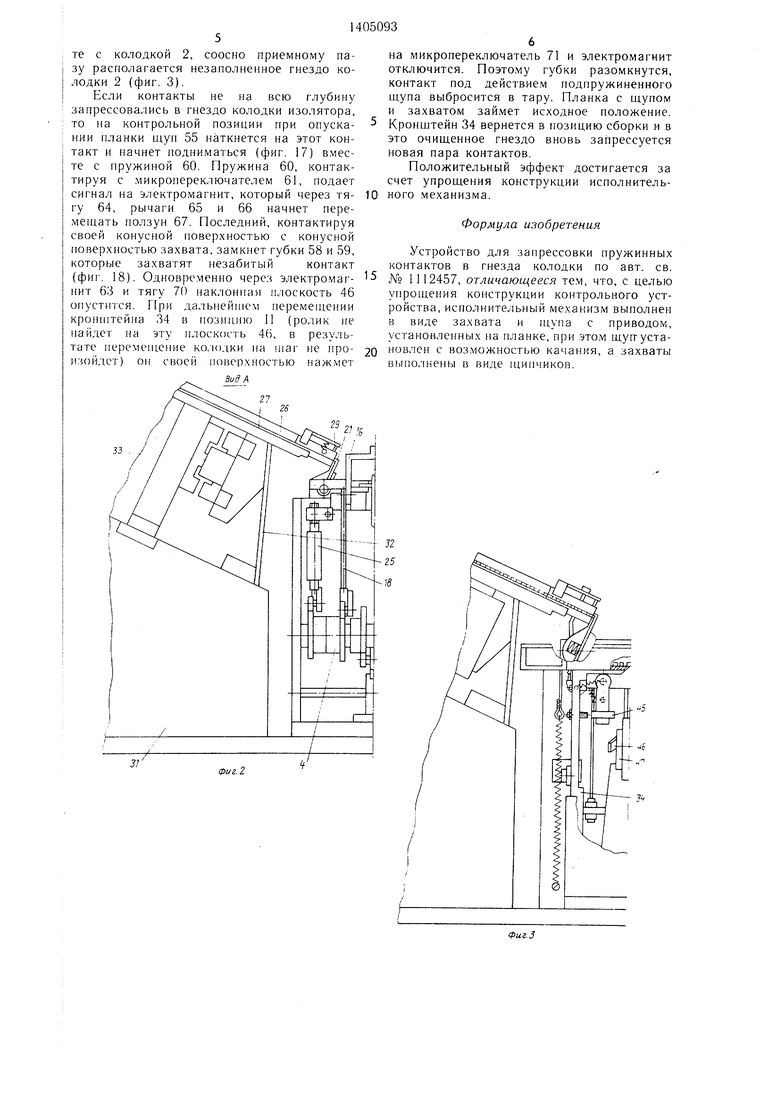
Если контакты не на всю глубину запрессовались в гнездо колодки изолятора, то на контрольной позиции при опускании планки щуп 55 наткнется на этот контакт и начнет подниматься {фиг. 17) вместе с пружиной 60. Пружина 60, контактируя с .микропереключателем 61, подает сигнал на электромагнит, который через тягу 64, рычаги 65 и 66 начнет перемещать ползун 67. Последний, контактируя своей копуспой поверхностью с конусной поверхностью захвата, замкнет губки 58 и 59, которые захватят незабитыйконтакт
(фиг. 18). Одновре.менно через электромагнит 63 и тягу 70 наклонная плоскость 46 опустится. При дальнейшем перемещении крО1пнтейна 34 в позицию II (ро;1ик не найдет на эту Ь юскость 46, в результате не)емеп1ение ко.юдки на niar не произойдет) он своей поверхностью нажмет
Вид А
27
33
на микропереключатель 71 и электромагнит отключится. Поэтому губки разомкнутся, контакт под действием подпружиненного щупа выбросится в тару. Планка с щупом и захватом займет исходное положение.
Кронщтейн 34 вернется в позицию сборки и в это очищенное гнездо вновь запрессуется новая пара контактов.
Положительный эффект достигается за счет упрощения конструкции исполнительного .механизма.
Формула изобретения
Устройство для запрессовки пружинных контактов в гнезда колодки по авт. св.
№ 11 12457, отличающееся тем, что, с целью упрощения конструкции контрольного устройства, исполнительный механизм выполнен в виде захвата и niyna с приводом, установленных на планке, при этом щуп-установлен с возможностью качания, а захваты выпо. 1нены в виде П1,ипчиков.
J9 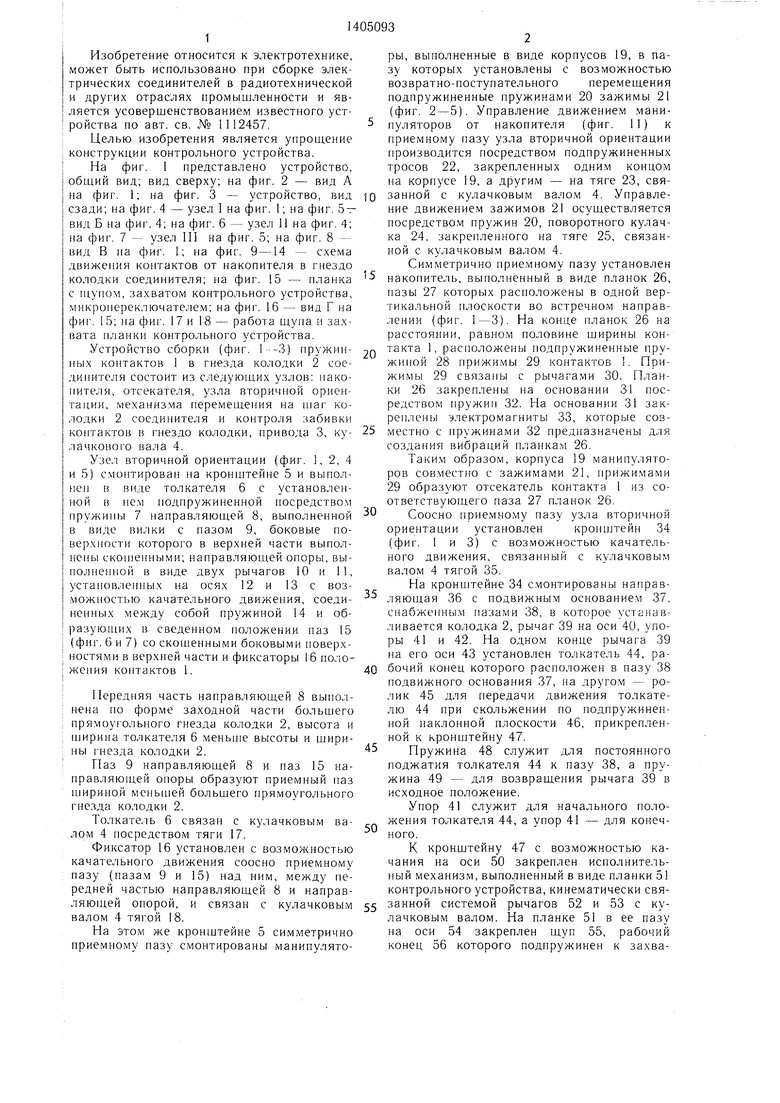

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки плоских пружинных контактов в гнезда колодки соединителя | 1983 |
|
SU1112457A1 |
| Устройство для установки контактов в колодки разъемов | 1988 |
|
SU1552276A1 |
| Устройство для установки контактов в колодку разъема | 1986 |
|
SU1396189A1 |
| Способ и устройство сборки пружинных плоских контактов в гнезда колодки соединителя | 1981 |
|
SU993368A1 |
| Устройство для установки контактов в гнезда колодки соединителя | 1986 |
|
SU1398003A1 |
| Устройство для установки пружинных контактов в гнезда колодки соединителя | 1990 |
|
SU1725303A1 |
| Устройство для ориентации и загрузки контактов в гнезда колодки разъема | 1980 |
|
SU955303A1 |
| Устройство для изготовления проволочных штырей и запрессовки их в изделие | 1988 |
|
SU1593879A2 |
| Устройство для ориентации и набора пластинчатых пружинных контактов в кассету | 1985 |
|
SU1359829A1 |
| Устройство для сборки запрессовкой стержневых деталей с пластинами | 1986 |
|
SU1380893A1 |

Изобретение относится к электротехнике. Целью изобретения является упрощение конструкции контрольного устройства. Устройство состоит из накопителя А, отсе- кателя В, узла вторичной ориентации С, механизма неремещения колодки 2, привода 3 и механизма контроля запрессовки контактов в гнездо колодки D. Узел вторичной ориентации С смонтирован на кронштейне и вынолнен в виде толкателя. Накопитель А выполнен в виде планок с пазами, расположенными в вертикальной п.тоскости во встречном направлении. Отсекатель В состоит из корпуса манипулятора с зажимами и прижи.мами. Ме.ханизм перемещения колодки 2 содержит подвижное основание, перемешающееся под действием толкателя. Механизм контроля запрессовки контактов в гнездо колодки D имеет щуп, служащий для проверки глубины заталкивания контактов в гнездо изолятора. Под действием подпружиненной тяги манипулятор перено- носит зажатые контакты от накопителя А в приемный паз узла вторичной ориентации С, осуществляя их складывание. Захват и щуп исполнительного механизма установлены на планке; щуп установлен с возможностью качания, а захват выполнен в виде щипчиков. 18 ил. (О (Л
A 5
w
21
Фиг.Э
29
Фие.Ю
(Pu.z.i2
21
9иг.13
9и.г.1
ВидГ
/
6859S9
.16
иг.18
г.15
9иг. 17
| Устройство для сборки плоских пружинных контактов в гнезда колодки соединителя | 1983 |
|
SU1112457A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
