О5
о оо
Изобретение относится к техническим средствам управления перемещением заголовок и может быть использовано для автоматизации управления безупорным остановом заготовок перед методическими нагревательными печами прокатных станов. ; Цель изобретения - повышение точности останова заготовки перед печами, i На фиг. 1 представлена функциональ- |ная схема устройства для управления без- |упорным остановом перемещаемой заготов- ки; на фиг. 2 - план неремен;ения заготовки; на фиг. 3 - диаграмма изменения скорости транспортера в функции пути перемещения.
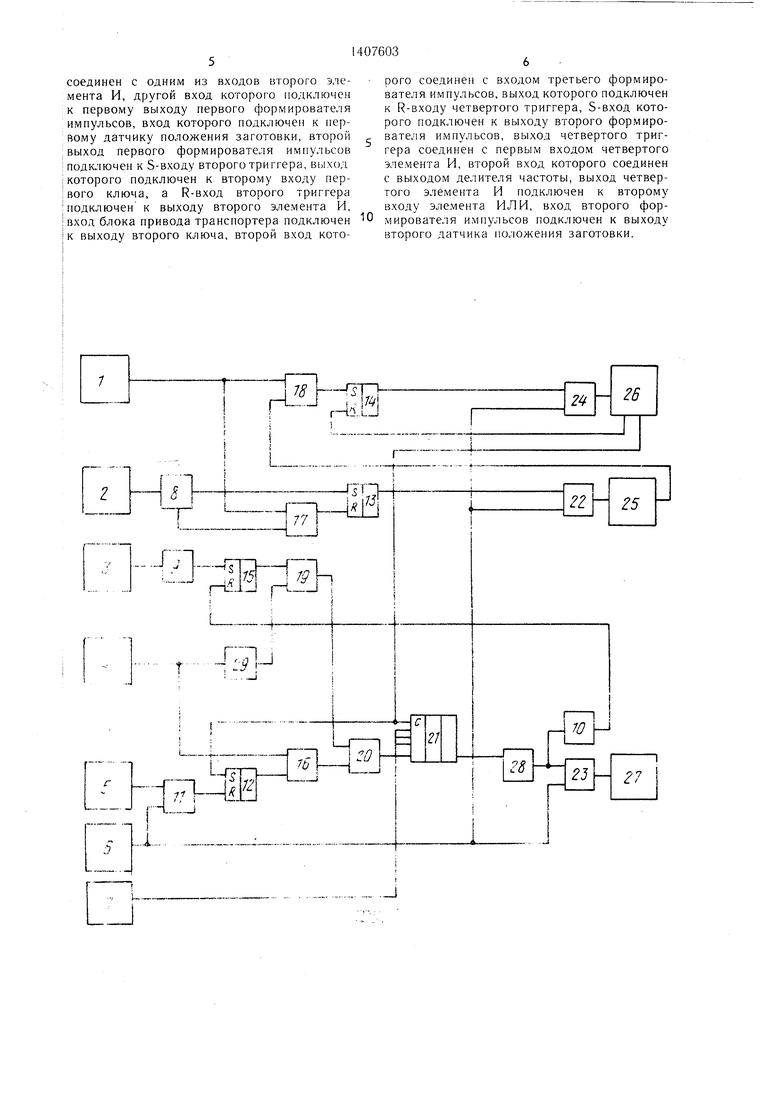
i Устройство содержит задатчик 1 режима работы рольганга, первый 2 и Еггорой 3 дат- 1ЧИКИ положения заготовки, датчик 4 путевых импульсов, датчик 5 скорости, задатчик 6 скорости, задатчик 7 кода, первый 8, второй 9 и третий 10 формирователи импульсов, сравнивающий элемент И, первый 12, второй 13, третий 14 и четвертый 15 триггеры, первый 16, второй 17, третий 18 и четвертый 19 элемент1)1 И, элемент ИЛИ 20, счетчик 21, первый 22, второй 23 и третий 24 ключи, блок 25 управления приводом рольганга, блок 26 управления приводом тол- кате.чя, блок 27 унравлепия приводом транспортера, деп1ифратор 28 и делитель 29 частоты.
Первый вход счетчика 21 подключен к задатчику 7 кода, а BTOpofi вход - к выходу элемента ИЛИ 20, первьп вход которого подключен к выходу элемента И 16, первый вход которого подключен к выходу триггера 12, R-вход которого подключен к выходу сравнивающего эле.мента 11, первый вход которого нодключен к датчику 5 скорости, а второй вход - к выходу задатчика 6 скорости, к первому входу ключа 22, к первому входу ключа 23, второй вход которого подк. почен к выходу дешифратора 28, вход которого подключен к выходу счетчика 21, выход датчика 4 путевых импульсов подключен к делителю 29 частоты и второму входу элемента И 16, выход ключа 22 подключен к входу блока 25 управления приводом рольганга, первый выход блока 26 управления приводом толкателя подключен к третьему входу счетчика 21 и к S-входу триггера 12, второй выход - к R-входу триггера 14, а вход - к выходу ключа 24, первый вход которого подключен к выходу задатчика (), а нто|-)ой вход - к выходу триггера 14, iiepiHJii вход которого подключен к выходу элемента И 18, один из входов которого подключен к ы.ходу блока 25, а дру- Ч)п входк ,;ii i:ii мк 1 и соединен с
)дним ii:i вхол .п э.юмеита И 17, другой вход которого пп,1кл( ;гн К 1 е}мюму выходу (|)0)мпрова 1ЧМЯ N ,м . ;,.,-()1, вход которого нодк. почен к датч1 .д ;j ио.можения заготовки, а BTOpoi i выход : I OjMiONiy входу триггера 13, выход K()i (1 подк.почеп к второму входу ключа 22, а второй вход к выходу
элемента И 17, вход блока 27 управления приводом транспортера подключен к выходу ключа 23, второй вход которого соединен с входом фор.мировате;1я 10, выход которого подключен к R-входу триггера 15, второй вход элемента И 19 подключен к выходу делителя 29 частоты, а выход - к второму входу элемента ИЛИ 20, выход формирователя 9 импульсов подключен к S-входу
триггера 15, а вход - к выходу датчика 3 положения.
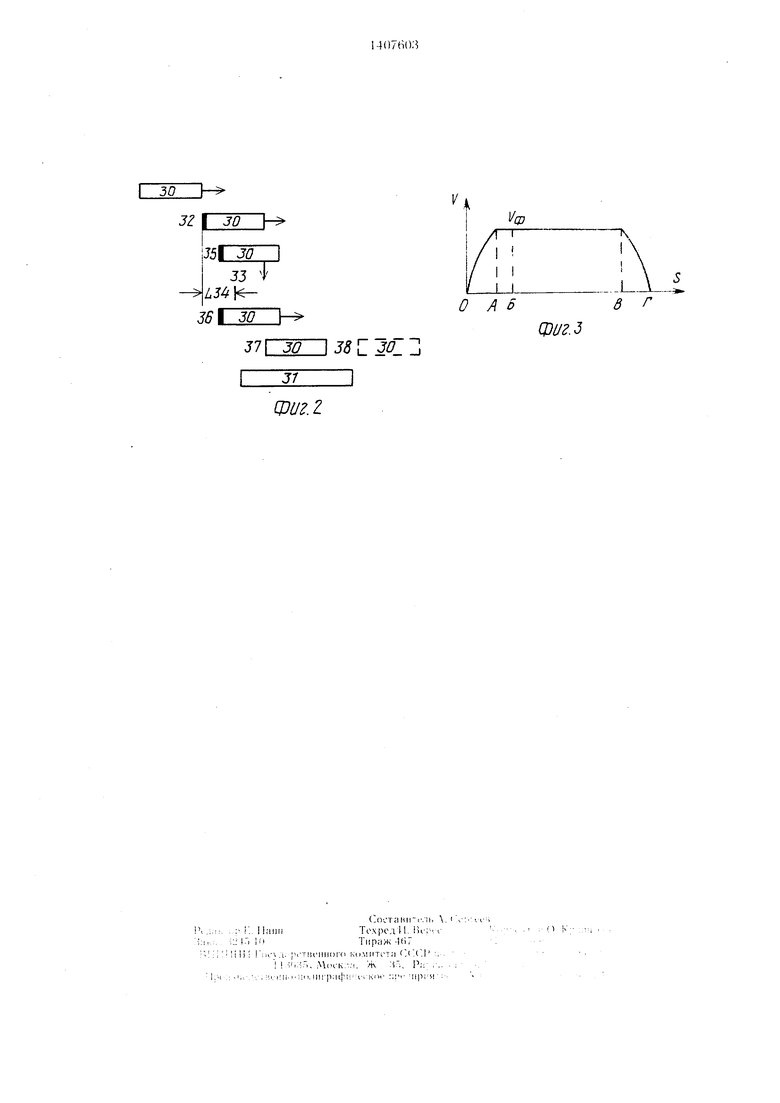
На фиг. 2 обозначено: заготовка 30, печь 31, линия 32 датчика 2 положения, линия 33 датчика 3 положения (позиция отсчета пути- перемещения заготовки), длина максимально возможного перемещения заготовки 34 во время тор.можения привода рольганга, позиция 35 заготовки, остановленной на рольганге, исходная позиция 36 заготовки на участке транспортера, заданная позиция 37
останова заготовки перед нечью, позиция 38 останова отбракованной заготовки, подлежащей снятию с участка транспортера.
0
5
0
5
0
5
Устройство работает следующим образом.
В момент ;1ересечения передним торцом заготовки линии 32 датчика 2 на втором вы- ходе формирователя 8 импульсов возникает импульс «Передний фронт сигнала датчика 2, который переводит триггер 13 в состояние «1, что приводит к замыканию ключа 22 и включению привода рольганга. При наличии сигнала «1 на выходе задатчика 1 режима импульс, возникаю1ций на первом выходе формирователя 8 импульсов («Задний фронт сигнала датчика 2) в момент пересечения задним торцом заготовки линии датчика 2, через открытый элемент И 17 возвращает триггер 13 в нулевое состояние, что фиводит к размыканию ключа 22, выключению привода чо.чьг анга и останову заготовки 30 (. 2) на позиции 35. После полной остановки привода рольганга блоком 25 формирчегся сигнал, который через сггкрытый элемент 1 18 переводит триггер 14 в состояние «1, что приводит к замыканию ключа 24, включению привода толкателя и сталкиванию заготовки 30 с роликов рольганга (с позиции 35) в сторону печи на транспортер (па позицию 36) посредством толкателя. В .мо.мент пересечения толкателем перед печью передней гранит зоны останова толкателя, находящейся относпте.чыш ее задней границы на расстоянии, равном максимально возможному пути перемещения толкателя во время торможения его привода, блоком 26 на его втором выходе формируется сигнал, который переводит гср 14 в ну,1евое состояние, что приводит к размыканию ключа 24 и вь ключе- нию привода толкателя и останову заготовки 30 на гюзиции 36. После полной остановки привода толкателя б/юком 26 на первом выходе формируется спгна.:. кспорый
переводит триггер 12 в состояние «1 и в счетчик 21, работающий в режиме вычитания, посредством задатчика 7 записывается число, соответствующее требуемому пути перемещения заготовки (участок ОГ, фиг. 3). В результате на выходе дешифратора 28 возникает сигнал «1, что приводит к замыканию ключа 23, включению привода транспортера и формированию путевых импульсов частоты f датчиком 4, которые через открытый элемент И 16 и элемент ИЛИ 20 О поступают на вычитающий второй вход счетчика 21. При прохождении заготовкой позиции А (фиг. 3) вследствие равенства фактической скорости Уф, регистрируемой датчиком 5, и скорости V.-j, заданной по перво- му выходу задатчика 6, срабатывает элемент 11 (амплитудный компаратор), триггер 12 переходит в нулевое состояние и элемент И 16 змакрывается. На участке АБ перемещения заготовки в счетчик 21 прекращается поступление путевых импульсов. В мо- 20 мент пересечения задним торцом заготовки позиции Б (линия датчика 3) на выходе формирователя 9 возникает импульс «Задний фронт сигнала датчика 3, который перевыключают в момент пересечения заготовкой позиции, находящейся относительно заданной позиции отсчета пути перемещения заготовок на расстоянии, равном максимально возможному пути переменхения заготовки во время торможения привода рольганга, включают приводы толкателя, ось симметрии которого параллельна оси симметрии печи, и транспортера, ось симметрии которого перпендикулярна оси симметрии печи, выключают приводы толкателя и транспортера соответственно в момент пересечения толкателем позиции, находящейся относительно заданной позиции его останова на расстоянии, равном максимально возможному пути пересечения заготовкой, перемещаемой на понил енной скорости, позиции, находящейся относительно заданной позиции останова заготовки на расстоянии, равном измеренному пути пере.мещения заготовка во время разгона привода транспортера. 2. Устройство управления безупорным остановом перемещаемой заготовки перед печью по п. I, содержащее датчик скорости, задатчик скорости, задатчик кода, де1ниф- ратор, блок управления приводом рольганводит триггер 15 в состояние «1. С этого с сравнивающий элемент, делитель частомомента времени путевые импульсы частоты 1/Zf, формируемые делителем 29, через открытый элемент И 19 и элемент ИЛИ 20 начинают поступать на второй вход счетчика 21. При достижении задним торцом
ты, триггер, элемент И, элемент ИЛИ, два ключа, счетчик, первый вход которого подключен к задатчику кода, а второй -- к выходу элемента ИЛИ, первый вход которого подключен к выходу элемента И, первый
заготовки позиции В дещифратор 28 снимает ЗО вход которого подключен к выходу триггевыключают в момент пересечения заготовкой позиции, находящейся относительно заданной позиции отсчета пути перемещения заготовок на расстоянии, равном максимально возможному пути переменхения заготовки во время торможения привода рольганга, включают приводы толкателя, ось симметрии которого параллельна оси симметрии печи, и транспортера, ось симметрии которого перпендикулярна оси симметрии печи, выключают приводы толкателя и транспортера соответственно в момент пересечения толкателем позиции, находящейся относительно заданной позиции его останова на расстоянии, равном максимально возможному пути пересечения заготовкой, перемещаемой на понил енной скорости, позиции, находящейся относительно заданной позиции останова заготовки на расстоянии, равном измеренному пути пере.мещения заготовка во время разгона привода транспортера. 2. Устройство управления безупорным остановом перемещаемой заготовки перед печью по п. I, содержащее датчик скорости, задатчик скорости, задатчик кода, де1ниф- ратор, блок управления приводом рольган сравнивающий элемент, делитель частоты, триггер, элемент И, элемент ИЛИ, два ключа, счетчик, первый вход которого подключен к задатчику кода, а второй -- к выходу элемента ИЛИ, первый вход которого подключен к выходу элемента И, первый
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления безупорным остановом перемещающейся заготовки | 1980 |
|
SU900907A1 |
| Устройство для управления безупорным остановом перемещающейся заготовки | 1983 |
|
SU1084094A2 |
| Устройство управления безупорным остановом перемещающейся заготовки | 1984 |
|
SU1219191A2 |
| Резервированное устройство для управления перемещением объекта | 1982 |
|
SU1067468A1 |
| Устройство для учета перемещаемых изделий | 1983 |
|
SU1096671A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1015219A1 |
| Устройство для управления загрузкой печи для нагрева заготовок | 1979 |
|
SU872925A1 |
| Установка для безупорной мерной резки проката | 1977 |
|
SU656753A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1019201A1 |
Изобретение относится к техническим средствам управления перемещением заготовок и может быть использовано для автоматизации управления безупорным остановом заготовок перед методическими нагревательными печами прокатных станов. Цель изобретения - повышение точности останова заготовки перед печами. При перемещении по рольгангу на транспортной скорости заготовки, подлежащей останову перед печью, выключают привод рольганга в момент пересечения заготовкой линии визирования одного из датчиков положения заготовки. После полной остановки привода рольганга посредством толкателя осуществляют сталкивание заготовки с роликов рольганга на транспортер. После полной остановки привода толкателя осуществляют транспортировку заготовки на пониженной скорости на заданную позицию останова заготовки перед печью. 2 с.п. ф-лы, 3 ил. (Л
сигнал «1, что приводит к размыканию ключа 23 и замедлению привода транспортера до полной остановки (участок ВГ) и к положению остановленной заготовки на заданной позиции Г останова, так как .
Одновременно на выходе формирователя 10 35 первого ключа, к первому входу второго клю- возникает импульс, который возвращает триг- ча, второй вход которого подключен к выхогер 15 в нулевое состояние.
По поводу работы дешифратора 28 необходимо отметить, что на его выходе присутствует сигнал «I при нескольких последовательных состояниях счетчика 21, соответ- ствуюпд.их перемещению заготовки на участке ОВ.
Предлагаемый способ управления безупорным остановом перемещаемой заготовки и устройство для его осуществления по сравнению с известными повышают точность останова за счет изменения направления перемещения заготовки в процессе управления ее остановом на заданной позиции перед печью.
45
ду дешифратора, вход которого подключен к выходу счетчика, датчик путевых импульсов, выход которого подключен к делителю частоты и второму входу элемента И, выход первого ключа подключен к входу блока управления приводом рольганга, отличающееся тем, что, с целью повышения точности останова заготовки, оно снабжено за- датчико.м режима работы привода ро.чьганга, двумя датчиками положения заготовки, двумя формирователями импульсов, тремя э.че- ментами И, тремя триггерами, блоком управ- ления приводом транспортера, ключом, б. ю- ком управления приводом толкателя, первьп выход которого подключен к третьему входу 5Q счетчика и к первому входу первого триггера, второй выход - к R-входу третьег о триггера, а вход - к выходу третьего ключа, первый вход которого подключен к выходу задатчика скорости, а второй вход - - к выходу третьего триггера, S-вход которого иодклюФормула изобретения
лярна оси сим.метрии печи, отличающийся тем, что, с целью повьипения точности останова заготовки, привод рольганга
ра, второй вход - к выходу сравнивающего элемента, первый вход которого подключен к датчику скорости, а второй вход - к первому выходу задатчика скорости, выход которого подключен к первому входу
ду дешифратора, вход которого подключен к выходу счетчика, датчик путевых импульсов, выход которого подключен к делителю частоты и второму входу элемента И, выход первого ключа подключен к входу блока управления приводом рольганга, отличающееся тем, что, с целью повышения точности останова заготовки, оно снабжено за- датчико.м режима работы привода ро.чьганга, двумя датчиками положения заготовки, двумя формирователями импульсов, тремя э.че- ментами И, тремя триггерами, блоком управ- ления приводом транспортера, ключом, б. ю- ком управления приводом толкателя, первьп выход которого подключен к третьему входу счетчика и к первому входу первого триггера, второй выход - к R-входу третьег о триггера, а вход - к выходу третьего ключа, первый вход которого подключен к выходу задатчика скорости, а второй вход - - к выходу третьего триггера, S-вход которого иодклюкоторого по.1клк1чен к 1М)1ходу о. юка ynpai. ie- ния приводом рольганга, а друго11 к задаг- чику режима pjinoibi привода po.ibranra и
соединен с одним из входов второго элемента И, другой вход которого подключен к первому выходу первого формирователя импульсов, вход которого подключен к первому датчику положения заготовки, второй выход первого формирователя импульсов подключен к S-входу второго триггера, выход I которого подключен к второму входу пер- ; вого ключа, а R-вход второго триггера июдключен к выходу второго элемента И, вход бл.ока привода транснортера подключен IK выходу второго ключа, второй вход кото0
рого соединен с входом третьего формирователя импульсов, выход которого подключен к R-входу четвертого триггера, S-вход которого подключен к выходу второго формирователя импульсов, выход четвертого триггера соединен с первым входом четвертого элемента И, второй вход которого соединен с выходом делителя частоты, выход четвертого элемента И подключен к второму входу элемента ИЛИ, вход второго формирователя импульсов подключен к выходу второго датчика положения заготовки.
1
г 30 32 30 |-
т 3Q
J3 I
Z. 30 J7I 30 38 30 IJ7I
. Z
О А 6
фцг.5
| Способ безупорного останова перемещающихся заготовок | 1977 |
|
SU738706A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство управления безупорным остановом перемещающейся заготовки | 1980 |
|
SU900907A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
