(54) СПОСОБ ВЕЗУПОРНОГО ОСТАНОВА ПЕРЕМЕЩАКВДИХСЯ ЗАГОТОВОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления безупорным остановом перемещающейся заготовки | 1980 |
|
SU900907A1 |
| Устройство для управления безупорным остановом перемещающейся заготовки | 1983 |
|
SU1084094A2 |
| Способ управления безупорным остановом перемещаемой заготовки и устройство для его осуществления | 1986 |
|
SU1407603A1 |
| Устройство управления безупорным остановом перемещающейся заготовки | 1984 |
|
SU1219191A2 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1015219A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| Устройство для программного управления объектом с К - ступенчатым остановом | 1985 |
|
SU1287108A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1019201A1 |
| Способ автоматического управления процессом гибки листов на трех- и четырехвалковых машинах | 1987 |
|
SU1466833A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
Ввиду того, что отсчет пути перемещения заготовки производится от линии датчика, когда заготовка пе-. ресекает эту линию на некоторой установившейся скорости, равной, например V 0,5 м/с, образуется мертвая зона, ширина которой по каждую сторону линии датчика равна пути перемещения заготовки за время торможения привода. В этой зоне не может быть остановлена заготовка , что уменьша.ет диапазон длин останавливаемых заготовок на величину, равную удвоенному значению максимально возможного пути S перемещения заготовок за время торможеНйя привода, либо вынуждает установить дополнительный датчик на указанном расстоянии SM относительно контрольного датчика, расположенного, например у крйя пЬсЖдоШЬго окна печи.
Целью изобретения является повышение точности безупорного останова перемещакицихся заготовок на заданных позициях останова.
Указанная цель достигается тем, что в способе безупорного останова перемещающихся заготовок определяют координату позиции останова заготов А 5Инрсительно линии датчика наличия заготовок на бсновании тре(5ований технологии; перемещайт заготовку на установившейся скорости и дополнительно выключают привод механизма перемещения заготовок при пересечении линии датчика заготовкой до егб itbrtHbro останова; измеряют путь перемещения заготовки за время торможения привода с установив1 й CKopdctH до нулёвсэ ; вычйсля юТ прёобразованную координату промежуточной позиции останова заготовки, равную разности между заданной координатой и путем перемещения заготовки за время торможения привода; включают привод на время, необходимее дня перемещения заготовки на раййтонйё, равное п реобразованной координате, уменьшенное на величину пути
738706
перемещения заготовки за время торможения привода со скорости, пропорциональной ее установившемуся значению, до нулевой скорости, при этом коэффициент пропорциональности, равный отношению преобразованной координаты к удвоенному значению измеренного пути перемещения заготовки за время торможения привода с установившейся скорости до нулевой, не превышает своего предельного значения, равного единице, при любых значениях преобразованной координаты. Кроме того, перемещение очередной заготовки осуществляют относительно линии датчика на расстояние , равноё заданной координате позиции останова, уменьшенное на измеренный путь перемещения преды-г дущей заготовки за время торможения привода с установившейся скорости до нулевой, после чего привод выключают до его полного останова и вычисляют разность между згщанной и фактической кбординатами позиций останова очередной заготовки, превышающую заданную максимально допустимую погрешность останова заготовки на позиции останова; включает привод на время, необходимое для перемещения очередной заготовки на расстояние, равное величине этой разности, уменьшенное на величину пути перемещения заготовки за время торможения привода со скорости, пропорциональной ее установившемуся значению, до нулевой скорости, при этом коэффициент пропорциональности, равный отношению в.еличины вычисленной paianocTH координат к удвоенному значению измеренного пути перемещения очередной заготовки за время торможения привода с установившейся скорости до нулевой, не превышает своего предельного значения, равно го единице, при любых значениях вычисленно разности координат.
Благодаря введению в предлагаемый способ предвар11тельного (Останова заготовки на промежуточной позиции путем выключения привода механизма перемещения заготовок при пересечении линии датчика заготовкой, перемещающейся на установйвшейся скорости, появляется возможность экспэриментального определения реальных динамических характеристик привода индивидуально для кгокдой заготовки в зависимости от ее веса, геометрических размеров, температуры и состояния поверхности, а. также значений напряжения и частоты питающей сети, влияющих на длину фактического пути перемещения заготовки за время торможения привода.
Эти данные становятся основанием более точного расчета момента выключения привода с целью окончательного останова заготовки на позиции
рстанова с заданной координатой. Перемещение заготовки с промежуточной позиции останова на позицию останова с заданной координатой начинается с ,нулевой скорости, что, в свою очеред еще более способствует точному оста; нову заготовки на заданной позиций. Расчет времени перемещения заготовки при включенном приводе обусловлен указанными приемами,где удобнее пользоваться преобразованной координатой позиции останова.
Ввиду того, что измерение пути перемещения заготовки в направлении преобразованной координаты Х производится от точки промежуточной позиции останова, где X. 0, находящейся от линии датчика на расстоянии измеренного пути S перемещения заготовки за время t торможения привода, точность останова заготовки по пред лагаемому способу не зависит от не стабильности л S V/2 -дь этого пути S перемещения, где V - установившаяся скорость перемещения заготовки At - нестабильность времени торможения привода, а определяется зависимостью Л5 V/2 -ut, где А tнестабильнбсть разности между временем торможения привода со скорости Vj, до Vq О и временем пуска привода с УП О до скорости Vn. Практически лз« сГ где с - максимально допустимая погрешность останова заготовок. Кроме того, в районе линии датчика не образуется мертвая зона, так как от промежуточ- . ной позиции останова заготовку перемещают в направлении заданной координаты с начальной скорости, равной нулю, и заготовка может быть остановлена в любой точке, в том числе и в точке, где X О,
Таким сЗбразом, благодаря повьаиенной точности останова (&s« f ) ис- ключаеАся возможность возникновения аварийных ситуаций в случае останова заготовок на критических позициях останова, расположенных, например у краев печи, а также снижаются требования к эксплуатационным характеристикам привода механизма перемещения заготовок, в частности к стабильности времени их торможения с установившейся скорости до нулевой.
Примененная в данном способе oneрация предварительного выключения привода при пересечении заготовкой линии датчика является необходимой операцией не только для решения задачи измерения пути S перемещения заготовки за время торможения привода, но принудительно должна выполняться каждый раз, когда заданная позиция останова заготовки расположена относительно линии датчика против напралп мия движения
заготовки (при Х 0) или на рас- i стоянии соответствующем Х) S, т.е в итоге не менее чем в 50 случаях из 100.
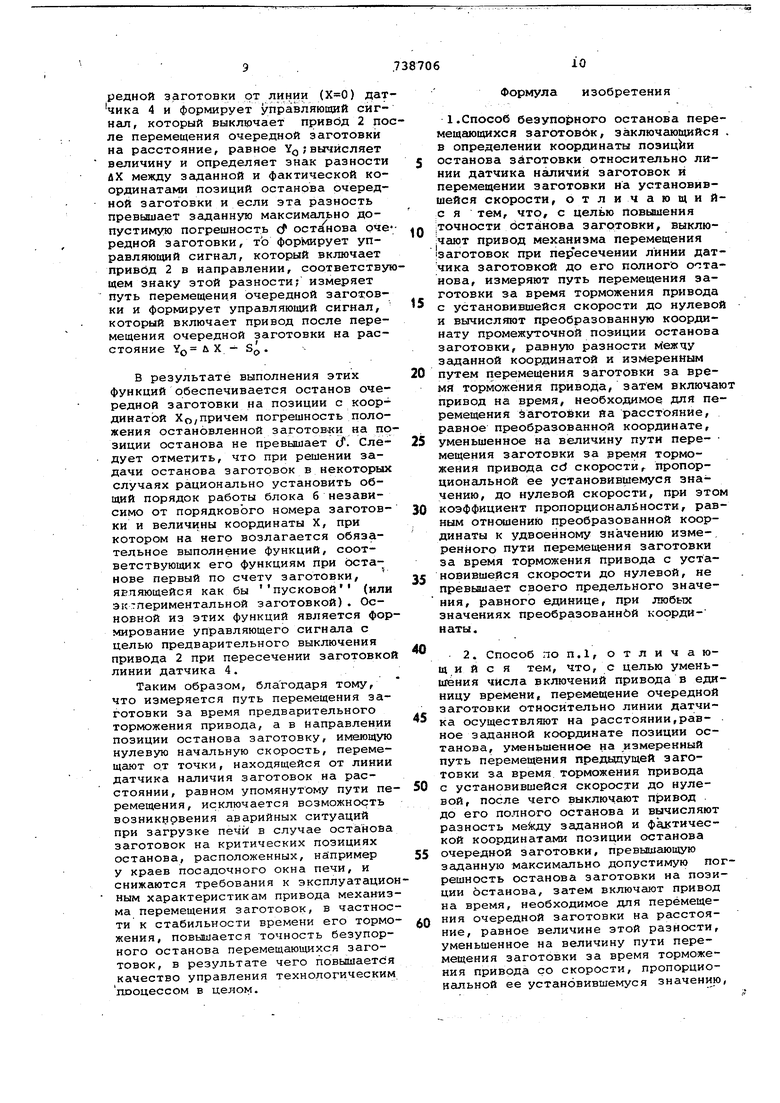
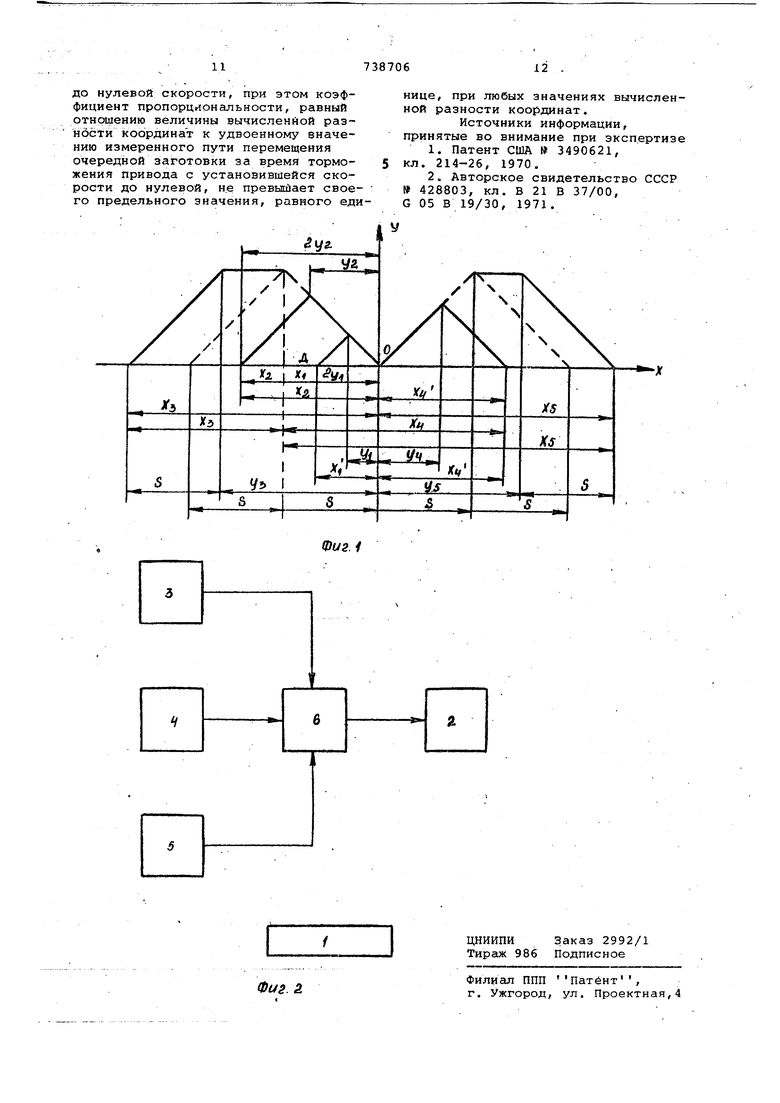
На фиг. 1 изображена блок-схема, устройства для реализации предложенного способа;на фиг. 2 - график различных вариантов взаимоположения позиций останова и линии датчика, где Х...,Х5 - координаты позиций останова заготовок отнрсительно линии датчика, проходящей через точку Д; Х,...,Х5 -соответственно преобразованные координаты позиций останова относительно промежуточной позиции останова, проходящей через точку О; ...,Y5 соответственно Пути перемещения заготовок от точки О при включенном приводе; S DO - измеренный путь перемещения заготовки за время торможения привода.
При построении графика сделано допущение, что путь перемещения заготовки за время пуска привода в точке О до достижения скорости Vn с достаточной точностью равен пути . перемещения заготовки за время торможения привода с данной скорости V до его останова.. Так, например, для электродвигателя типа Д-808 разность этих путей для скорости V 0,5 м/с и заготовок весом 4- 19 т.не превьиаает i 10 мм при их перемещении по секциям загрузочного рольганга перед печами. Согласно графику можно записать следующие формулы для определения пути у перемещения заготовки рт момента включения привода при нахождении остановленной заготовки на промежуточной ПОЗИЦИЙ Останова до его выключения, т.е. при включенном приводе
Y х-х/2 при хч S (1) У X - S при Х , S (2) Эти формулы обобщаются выражением Y X - S, (3), которое Формулируется следующим образом: после останова заготовки на промежуточной позиции (точка 0) включают привод в направлении, соответствующем знаку преобразованной координаты X на время, необходимое для перемещения заготовки на расстояние, равное преобразованной /координате, уменьшенное на величину пути перемещения S заготовки за времй торможения, привода со скорости Vn x/2S, пропорционгшьной установившемуся значению скорости V, привода до нулевой скорости, при этом, коэффициент пропорциональности X/2S, равный отношению преобразованной координаты к удвоенному значению измеренного пути перемещения заготовки, за время торможения привода с установившейся скорости V, .до нулевой, не превышает своего предельного значения, равного единице, при любых значениях преобразованной координаты, а именно X/2S 1 йри Х 2S (4) Суммарное перемеа ение Y заготовки при включенном (Y Х - S) и вы ключенном (Y . S) привода, от промежуточной позиции (X S) до остано ва на позиции с заданной координатой X, равно преобразованной х ,так как У Y + у Х (5) Задача безупорного останова заготовок, перемещающихся, например по рольгангу, в сторону нагревательной печи, решается следующим образом. После того, как нагревательная печь подготовлена к загрузке определяют заранее или измеряют в процессе перемещения заготовки по рольгангу перед печью координа ту X позиции останова относительно датчика (пусть эта координата определена для перед него торца заготовки и находится на ХТсазаннОм расстоянии X от датчика против направления движения заготовки, что условно можно записать как ); перемещают заготовку в направ лёнйй позиции останова с координато X на установившейся скорости V; выключают до полного останова (V 0) привод механизма перемещения заготовок при пересечении линии датчика (X 0) передним торцом заготовки; измеряют путь S перемещения заготойк за время торможения привода со скорости Vn до Vn О и вычисляют преобразованную координа ту X промежуточной позиции останова, равную разности между заданной координатой X и измеренным путем S перемещения заготовки за время торможения (Sty/2) привода со скорости Vn до Vn О; включают привоя в, направлении, соответствующем знаку преобразованной координаты (при х О в сторону датчика, при в противоположную сторону) , на время, необходЗ имое для перемещения заголовки на расстояние равное преобразованной координате Х уменыаенное на величину пути S (причем, О зЧ S) перемещения заготовки за время торможения (S : V/ привоЛа со скорости V - п x/2S, пропорциональной ее установившемуся значению Vn ДО нулевой с.корости (Vj 0) , при этом, коэффициент пропорциональности X /25 , О к X/4s.- 1 при Х 2S. Перемещение очередной заготовки относительно датчика осуществляют на расстояние, равное заданной координате X{j позиции останова, умень шенной на измеренный путь S пере мещения предыдущей заготовки за вре мя торможения привода, равное S:V/2 после чего выключают привод до его полного останова; вычисляют разность д X между заданной и фактической координатами (соответственно XQ и Хф) останова.очередной заготовки, превышающую заданную максимально допустимую погрешность cf останови заготовки на позиции останова, и формируют сигнал включения привода (если вычисленная разность д X cfy то этот сигнал не формируют); включают привод в направлении, соответствующем знаку разности л X этих координат, на время, необходимое для перемещения очередной заготовки на расстояние д X, уменьшенное на величину пути SQ (причем 0 S S., перемещения заготовки за время торможения (SQ : Vo/2) привода со скорости VP Vp-AX/2SQ, пропорциональной ее установившемуся значению Vn, до. нулевой скорости (Vp 0), при зтом 1 ДХ/2% 0 ПРИ Д)(.25д и ДУ. Объектом управления являются заготовка 1 и привод 2 механизма перемещения заготовок. Блок-схема содержит задатчик 3 координаты позиции останова, датчик 4 наличия заготовок, датчик 5 положения привода 2 и вычислительный блок 6. После того, как нагревательная печь подготовлена к загрузке на рольганг, расположенный перед печью, заготовка поступает на установившейся скорости V в направлении заданной координаты позиции останова. Блок б, используя информацию задатчика 3 и датчиков 4 и 5, формирует управляющий сигнал, который выключает привод 2 при пересечении заготовкой 1 линии (X 0) датчика 4, измеряет путь перемещения заготовки 1 за время торможения привода 2 до его полного останова, вычисляет величину и определяет знак преобразованной координаты х , т.е. Х О при Х S и Х4 О и при , формирует управляющий сигнал, который Включает привод 2 в исправлении, соответствующем знаку преобразованной координаты х и также измеряет путь перемещения Заготовки 1 от промежуточной позиции с координатной х О (X S) и формирует управляющий сигналу который выключает 2 после перемещения заготовки 1 на расстояние У x-s- « В результате выполнения перечисленных функций обеспечивается останов заготовки на позиции с заданной координатой, причем погрешность положения остановленной заготовки на позиции-останова не превышает f. При подаче к печи очередной заготовки блок 6 вычисляет расстояние, равное пути УО Х - S перемещения очередной заготовки при включенном приводе, где Х - заданная координата позиции останова очередной заготовкй; измеряет путь перемещения очередной заготовки от линии () датчика 4 и формирует управляющий сигнал, который выключает привод 2 поле перемещения очередной заготовки на расстояние, равное YQ;вычисляет величину и определяет знак разности ЛХ между заданной и фактической координатами позиций останова очередной заготовки и если эта разность превышает заданную максимально допустимую погрешность cf останова очередной заготовки, то формирует управляющий сигнал, который включает привод 2 в направлении, соответствущем знаку этой разности; измеряет путь перемещения очередной заготовки и формирует управляющий сигнал, который включает привод после перемещения очередной заготовки на расстояние - Sp .
В результате выполнения этих функций обеспечивается останов очередной заготовки на позиции с координатой Хо/причеМ погрешность положения остановленной заготовки на позиции останова не превышает cf. Следует отметить, что при решении задачи останова заготовок в некоторых случаях рационально установить общий порядок работы блока б независимо от порядкового номера заготовки и величины координаты X, при котором на него возлагается обязательное выполнение функций/ соответствующих его функциям при останове первый по счету заготовки, являющейся как бы пусковой (или экспериментальной заготовкой). Основной из этих функций является формирование управляющего сигнала с целью предварительного выключения привода 2 при пересечении заготовкой линии датчика 4.
Таким образом, благодаря тому, что измеряется путь перемещения заготовки за время предварительного торможения привода, а в направлении позиции останова заготовку, имеющую нулевую начсшьную скорость, перемещают от точки, находящейся от линии датчика наличия заготовок на расстоянии, равном упомянутому пути перемещения, исключается возможность возникновения аварийных ситуаций при загрузке печи в случае останова заготовок на критических позициях останова, расположенных, например у краев посадочного окна печи, и снижаются требования к эксплуатационным характеристикам привода механизма перемещения заготовок, в частности к стабильности времени его торможения, повышается точность безупорного останова перемещающихся заготовок, в результате чего повышается качество управления технологическим гшоцессом в целом.
Формула изобретения
Q ;точности остёнова заготовки, выклю:чают привод механизма перемещения Заготовок при пересечении линии датчика заготовкой до его полного останова, измеряют путь перемещения заготовки за время торможения привода
5 с установившейся скорости до нулевой и вычисляют преобразованную координату промежуточной позиции останова заготовки, равную разности между заданной координатой и измереиным
0 путем перемещения заготовки за время торможения привода, затем включают привод на время, необходимое для перемещения Заготовки йа расстояние, равное преобразованной координате,
5 уменьшенное на величину пути перемещения заготовки за время торможения привода cd скорости, пропорциональной ее установившемуся значению, до нулевой скорости, при этом
0 коэффициент пропорционалбности, равным отношению преобразованной координаты к удвоенному значению изме-, ренНого пути перемещения заготовки за время торможения привода с установившейся скорости до нулевой, не превьниает своего предельного значения, равного единице, при любых значениях преобразованнбй координаты.
0
0 с установившейся скорости до нулевой, после чего выключают привод до его полного останова и вычисляют разность мekдy заданной и фа.ктической координатами позиции останова
5 очередной заготовки, превьииающую
заданную максимально допустимую погрешность останова заготовки на позиции останова, затем включают привод на время, необходимое для перёмещеQ ния очередной заготовки на расстояние, равное величине этой разности, уменьшенное на величину пути перемещения заготовки за время торможения привода со скорости, пропорциональной ее установившемуся значению,
до нулевой скорости, при этом коэффициент пропорциональности, равный отношению величины вычисленйой разности координат к удвоенному вначению измеренного пути перемещения очередной заготовки за время торможения привода с установившейся скорости до нулевой, не превьжйает свое- го предельного значения, равного единице, при любых значениях вычисленной разности координат.
Источники информации, принятые во внимание при экспертизе
G 05 В 19/30, 1971.
