4
О
со ел
Oi О5
ся внутри корпуса 1 с помощью колес 3 и 8. Разрыв кинематической цепи осуществляется посредством винтовой пары 5 или при
перегрузке платформы действием массы груза, сжимающего пружины 6 и выводящего колесо 8 из зацепления. 2 ил.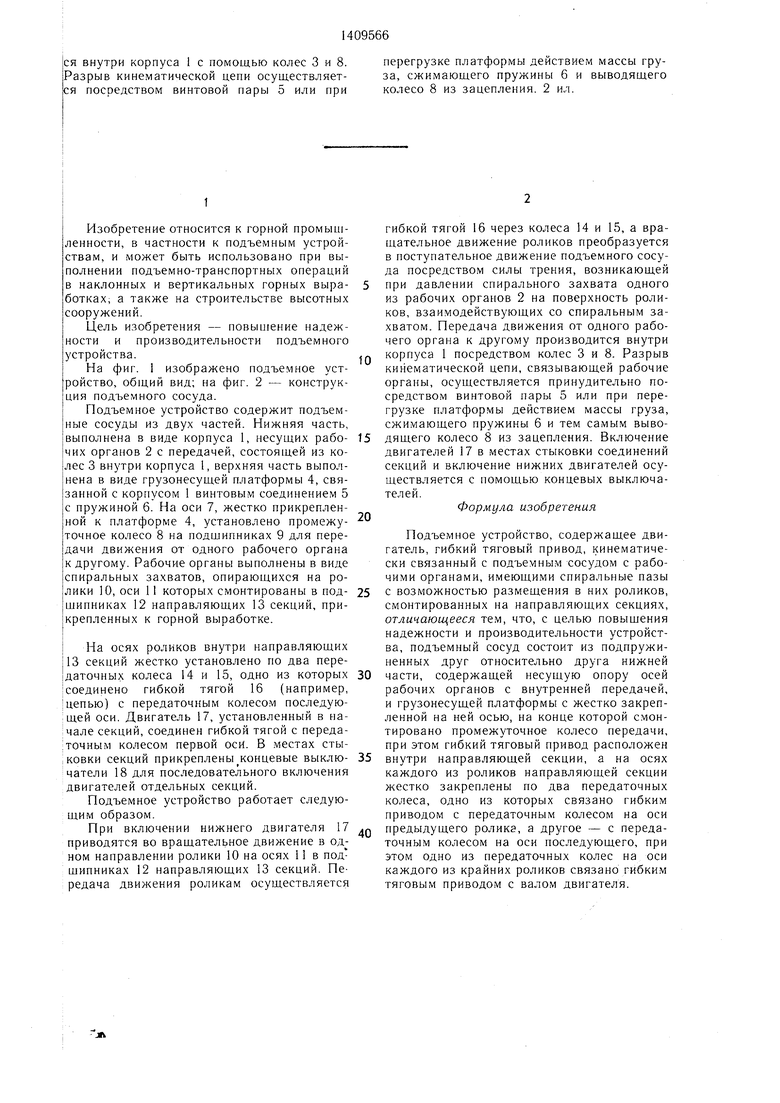
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| УСТРОЙСТВО ДЛЯ ВЫЕМКИ ГРУНТА | 2007 |
|
RU2366780C1 |
| Устройство для разработки жильных месторождений полезных ископаемых | 1979 |
|
SU881330A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| МОТОЛЕБЕДКА | 2011 |
|
RU2489345C1 |
| МОДЕРНИЗИРОВАННОЕ БОГДАНОВА УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АВТОМОБИЛЯ ИЛИ ДРУГОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2562474C1 |
| УСТАНОВКА ДЛЯ БУРЕНИЯ СКВАЖИН | 1992 |
|
RU2011816C1 |
| Веломобиль | 1986 |
|
SU1399210A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
Изобретение относится к горной промышленности, в частности к подъемным устройствам, и может использоваться в строительстве, при эксплуатации высотных сооружений, транспортировании грузов и людей циклически и непрерывно. 1Дель изобретения - повышение надежности. Подъемное устройство содержит подъемные сосуды с рабочими органами 2, взаимодейстБуюш,ие с роликами 10, смонтированными на секциях напраБляюш,ей 13, прикрепленной к. горной выработке. Привод рабочих органов осуществляется посредством гибкого приводного органа 16, расположенного внутри секций направляюш.ей, а к осям роликов жестко прикреплено по два колеса 14, 15, одно из которых связано гибкой тягой с колесом предыдуш,ей оси, а другое таким же образом связано с соответствующим колесом последующей, оси. Подъемный сосуд состоит из двух частей, первая из которых выполнена в виде несущей опоры рабочих органов с внутренней передачей, соединяющей их, а вторая часть выполнена в виде платформы 4, соединенной с первой частью подпружиненной винтовой парой и несущей подвижную в вертикальном направлении ось промежуточного колеса внутренней передачи. При включении двигателя 17 приводятся во вращение ролики 10, вращательное движение которых преобразуется в поступательное движение сосуда. Передача движения от одного рабочего органа к другому производится (Л
Изобретение относится к горной промышленности, в частности к подъемным устройствам, и может быть использовано при выполнении подъемно-транспортных операций в наклонных и вертикальных горных выработках, а также на строительстве высотных сооружений.
Цель изобретения - повышение надежности и производительности подъемного устройства.
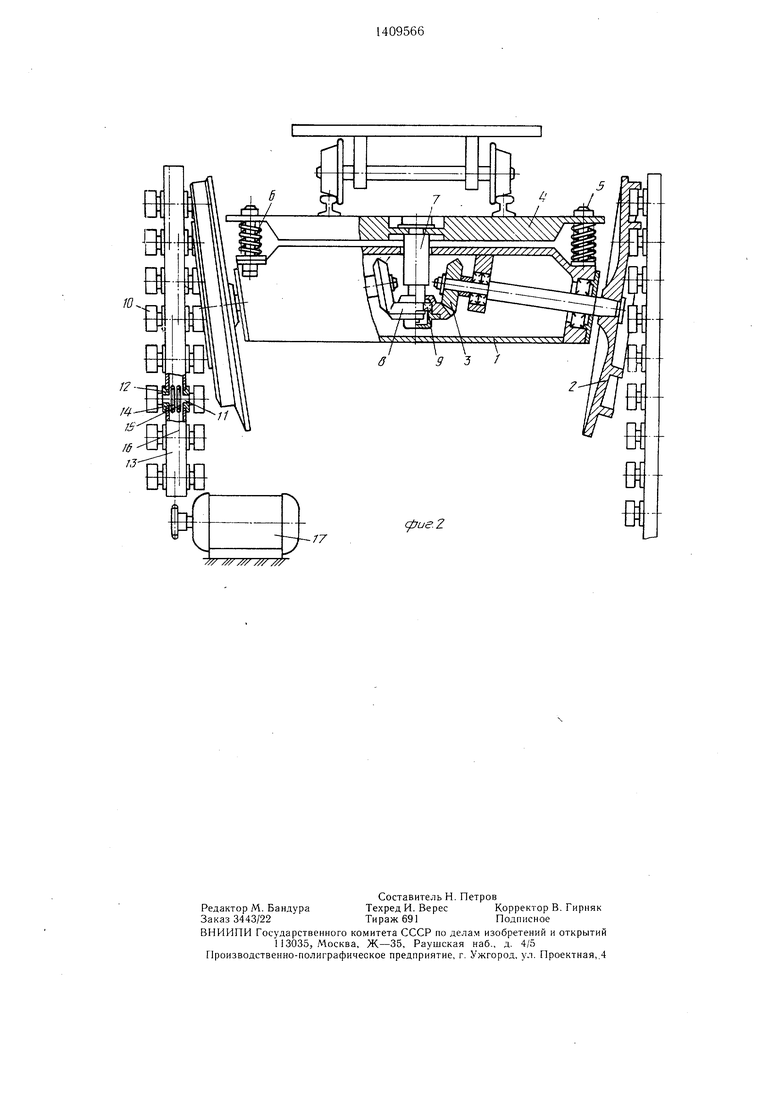
На фиг. 1 изображено подъемное устройство, общий вид; на фиг. 2 - конструкция подъемного сосуда.
Подъемное устройство содержит подъемные сосуды из двух частей. Нижняя часть, |выполнена в виде корпуса 1, несущих рабо- |чих органов 2 с передачей, состоящей из ко- |лес 3 внутри корпуса 1, верхняя часть выполнена в виде грузонесущей платформы 4, связанной с корпусом 1 винтовым соединением 5 с пружиной 6. На оси 7, жестко прикрепленной к платформе 4, установлено промежу- точное колесо 8 на подщипниках 9 для передачи движения от одного рабочего органа к другому. Рабочие органы выполнены в виде спиральных захватов, опирающихся на ролики 10, оси 11 которых смонтированы в под- шинниках 12 направляющих 13 секций, прикрепленных к горной выработке.
На осях роликов внутри направляющих 13 секций жестко установлено по два пере
даточных колеса 14 и 15, одно из которых соединено гибкой тягой 16 (например, цепью) с передаточным колесом последующей оси. Двигатель 17, установленный в начале секций, соединен гибкой тягой с передаточным колесом первой оси. В .местах стыковки секций прикреплены концевые выклю- чатели 18 для последовательного включения двигателей отдельных секций.
Подъемное устройство работает следующим образом.
При включении нижнего двигателя 17 приводятся во вращательное движение в одном направлении ролики 10 на осях 11 в подшипниках 12 направляющих 13 секций. Передача движения роликам осуществляется
0
5 5
0
5
0
гибкой тягой 16 через колеса 14 и 15, а вращательное движение роликов преобразуется в поступательное движение подъемного сосуда посредством силы трения, возникающей при давлении спирального захвата одного из рабочих органов 2 на поверхность роликов, взаимодействующих со спиральным захватом. Передача движения от одного рабочего органа к другому производится внутри корпуса 1 посредством колес 3 и 8. Разрыв кинематической цепи, связывающей рабочие органы, осуществляется принудительно посредством винтовой пары 5 или при перегрузке платформы действием массы груза, сжимающего пружины 6 и тем самым выводящего колесо 8 из зацепления. Включение двигателей 17 в местах стыковки соединений секций и включение нижних двигателей осуществляется с помощью концевых выключателей.
Формула изобретения
Подъемное устройство, содержащее двигатель, гибкий тяговый привод, кинематически связанный с подъемным сосудом с рабочими органами, имеющими спиральные пазы с возможностью размещения в них роликов, смонтированных на направляющих секциях, отличающееся тем, что, с целью повыщения надежности и производительности устройства, подъемный сосуд состоит из подпружиненных друг относительно друга нижней части, содержащей несущую опору осей рабочих органов с внутренней передачей, и грузонесущей платформы с жестко закрепленной на ней осью, на конце которой смонтировано промежуточное колесо передачи, при этом гибкий тяговый привод расположен внутри направляющей секции, а на осях каждого из роликов направляющей секции жестко закреплены по два передаточных колеса, одно из которых связано гибким приводом с передаточным колесом на оси предыдущего ролика, а другое - с передаточным колесом на оси последующего, при этом одно из передаточных колес на оси каждого из крайних роликов связано гибким тяговым приводом с валом двигателя.
/// ////////////
| Подъемное устройство | 1973 |
|
SU848465A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
