(Л
От 5/7Of j yfrpaS fr ufi
х ел
СХ)
да гг
Изобретение относится к подъемно- транспортному машиностроению, а именно к манипуляторам, применяемым для механизации погрузочно-разгрузочных работ.
Цель изобретения - повышение надежности и безопасности работы.
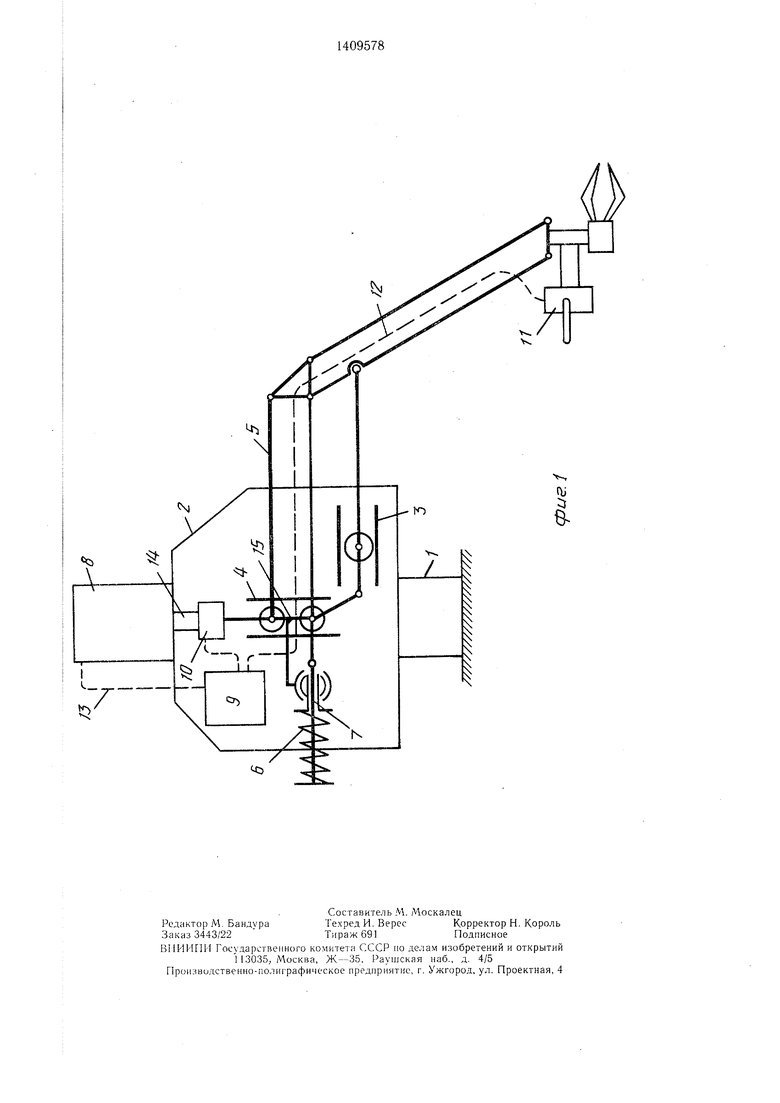
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - пневмогидроцилиндр вертикального перемеш.ения.
Манипулятор (фиг. 1) содержит опорно- поворотное устройство 1, корпус 2 с горизонтальными 3 и вертикальными 4 направляющими и стрелу 5, выполненную в виде шарнирно-рычажного механизма, уравновешенного в горизонтальной плоскости, например, при помош,и пружинного устройства 6, взаимодействующего через тягу 7 со звеном стрелы 5.
Управление пневмогидроцилиндром 8 осуществляется с помощью системы управления, состоящей из блока 9 управления, расположенного на корпусе 2, датчика 10 усилия и пульта 11 управления, установленного на конце стрелы 5 и соединенного линией 12 связи с блоком 9 управления. Выход блока 9 управления линией 13 связи соединен с пневмогидроцилиндром 8. Подвижный шток 14 пневмогидроцилиндра 8 через датчик 10 усилия и каретку 15 кинематически соединен со стрелой 5. Каретка 15 перемещается в вертикальных направляющих 4.
Пневмогидроцилиндр содержит пневмо- цилиндр и гидродемпфер.
Пневмоцилиндр (фиг. 2) состоит из корпуса 16, верхней крышки 17, нижней крышки 18, поршня 19 и полого штока 14.
Гидродемпфер состоит из штока 20, поршня 21, предохранительного клапана 22 и обратного клапана 23. На верхней крышке 17 пневмоцилиндра расположен гидрокомпенсатор 24. Шток 20 гидродемпфера имеет осевой канал 25, проходящий через поршень 21, который имеет дроссельное отверстие 26, соединяющее нижнюю часть канала 25 со штоковой полостью 27 гидродемпфера. Свободный конец штока 20 гидродемпфера жестко закреплен на верхней крышке 17 пневмоцилиндра.
Предохранительный клапан 22 укреплен на поршне 21 гидродемпфера со стороны бесштоковой полости 28 и содержит нормально открытый клапан 29 с радиально-осевым каналом 30 и пружину 31.
Обратный клапан 23, состоящ.ий из пружины 32 и клапана 33 с дроссельным отверстием 34, укреплен на свободном конце штока 20 гидродемпфера и расположен в полости 35 гидрокомпенсатора 24.
Бесштоковая полость 28 соединена со штоковой полостью 27 через радиально-осевой канал 30, открытый клапан 29 и дроссельное отверстие 26, а с полостью 35 гидрокомпенсатора 24 через радиально-осевой канал 30, открытый клапан 29, осевой канал 25, подклапанную полость 36 и дроссельное отверстие 34, выполненное в клапане 33. При изменении направления потока полость 35 гидрокомпенсатора 24 соединяется с подклапанной полостью 36 через откры- вающийся клапан 33.
Полости 27, 28, 35 и связывающие их каналы заполнены рабочей жидкостью.
Пневматическая полость 37 пневмогидроцилиндра 8 соединена линией 13 связи с блоком 9 управления.
0 Манипулятор работает следующим образом.
Масса стрелы 5 с грузом или без груза воздействует через каретку 15 на датчик 10 усилия, который выдает сигнал в блок 9 уп равления, пропорциональный усилию, воспринимаемому датчиком. Усиленный сигнал из блока 9 управления по линии 13 связи поступает в пневматическую полость 37 пневмогидроцилиндра 8.
Таким образом, давление в пневматичес0 кой полости 37 пневмогидроцилиндра устанавливается в зависимости от массы груза и грузозахватного устройства, т. е. уравновешивает эту массу.
Для подъема (или опускания) груза опеr ратор поворачивает рукоятку на пульте 11 управления вверх (или вниз), при этом сигнал по линии 12 связи поступает в блок 9 управления и увеличивает (или уменьшает) давление в пневматической полости 37 пневмогидроцилиндра 8, что приводит к переме0 щению поршня 19 и штока 14 пневмоцилиндра. При перемещении поршня 19 вверх, когда происходит опускание груза, вместе с ним перемещается щток 14. При этом пор- ьчень 21 гидродемпфера остается неподвижным и жидкость из бесштоковой полости 28
5 через радиально-осевой канал 30, открытый предохранительный клапан 29 и дроссельное отверстие 26 вытесняется в штоковую полость 27 гидродемпфера, а избыток жидкости, равный разности объемов бесштоковой и штоковой полостей, вытесняется через осевой ка нал 25 и дроссельное отверстие 34 в полость 35 гидрокомпенсатора 24. Для исключения разрыва потока жидкости необходимо, чтобы диаметр дроссельного отверстия 26 был больше диаметра дроссельного отвер5 стия 34, причем
d, ,, diuT
где d: и d2
50
диаметры дроссельных отверстий соответственно в поршне 21 и в обратном клапане 33; Dn и diiiT - диаметры соответственно.пор- ня 21 и штока 20 гидродемпфера.
При движении поршня 9 вниз, когда происходит подъем груза, жидкость из што- 55 ковой полости 27 вытесняется через дроссельное отверстие 26 и открытый предохранительный клапан 29 в бесштоковую полость 28. Кроме того, часть жидкости, необходимая
для компенсации разности объемов бесшто- ковой 28 и штоковой 27 полостей гидродемпфера, засасывается из полости 35 гидрокомпенсатора 24 через обратный клапан 23 В связи с тем, что клапан 33 открывается в сторону бесштоковой полости 28 и его пропускная способность равна (или больше) пропускной способности проходного сечения предохранительного клапана 29 и значительно больше, дроссельного отверстия 34, бес- штоковая полость 28 гидродемпфера заполняется без разрыва потока.
Скорость перемещения поршня 19, а следовательно груза, зависит от величины при- раш,ения давления в пневматической полости 37, т. е., от угла поворота рукояти пульта 11 управления. Максимальная скорость переме- ш.ения поршня 19 (при опускании груза) ограничивается предохранительным клапаном 29, работа которого основана на сравнении усилия пружины 31 с усилием от перепада давлений на клапане 29. При малой скорости перемещения поршня 19 перепад давления на предохранительном клапане 29 мал и усилие от перепада давления, воздействующего на клапан 29, не превосходит уси- тия пружины 31. С повыщением скорости поршня 19 перепад давлений на клапане 29 возрастает и он перемещается, прикрывая проход в осевом канале 25. Сопротивление потоку между полостями гидродемпфера возрастает, препятствуя дальнейшему увеличению скорости поршня 19, что способствует повышению надежности и безопасности управления.
При опускании груза на .максимальной скорости и резком отпускании рукоятки пульта 11 управления остановка груза происходит плавно, без резких динамических нагрузок, благодаря наличию гидравлической связи (через дроссельное отверстие 26 и открытый предохранительный клапан 29) между бесштоковой 28 и штоковой 27 полостями гидродемпфера и уравновешивающей силы со стороны пневматического цилиндра.
Обрыв линии 13 связи, соединяющей блок 9 управления с пневматической полостью 37 пневмогидроцилиндра 8, приводит к тому, что исчезает уравновешивающая сила и возрастает усилие со стороны штока 14. Под действием возросшего усилия увеличивается
0
перепад давления на предохранительном клапане 29, что приводит к перекрытию прохода в осевом канале 25. Таким обра- ом, при обрыве линии 13 связи отсекается .ю- лость 28 гидродемпфера от штоковой полости 27 и груз удерживается на высоте. Благодаря отсутствию внешних подсоединитель- ных устройств и линии связи между бесштоковой 28 и штоковой 27 полостями гидродемпфера и размещению его в поло-; UJTO- ке пневмоцилиндра обеспечивается повышение надежности и безопасности манипулятора.
Формула изобретения
5 Манипулятор, содержащий стрелу, выполненную в виде сбалансированного в горизонтальной плоскости щарнирно-рычажного механизма, одни из эле.ментов которого размещены в горизонтальной и вертикальной направляющих корпуса, смонтированного на опорно-поворотном устройстве, привод вертикального перемещения стрелы, включающий пневмогидроцилиндр, блок управления, датчик усилия, кине.матически соединенный с вертикальным приводом и стрелой, и пульт
5 управления, отличающийся тем, что, с целью повышения надежности и безопасности работы, пневмогидроцилиндр образован пневмо- цилиндром, выпоненным с крышкой и с полым штоко.м, в котором размещен гидродемпфер с поршнем, выполненным с дрос0 сельным отверстием и щтоком с осевым каналом, проходящим через поршень, несуп 1,ий со стороны бесштоковой полости нормально открытый предохранительный клапан, при- . свободный конец штока гидродемпфера жестко связан с крышкой пневмоцилинд5 ра, в которую вмонтирован гидрокомпенсатор с расположенным внутри него на конце штока гидродемпфера обратным клапаном, при этом бесштоковая полость гидродемпфера сообщена с полостью гидрокомпенсатора
д посредством нормально открытого предохранительного клапана, осевого канала штока гидродемпфера и дроссельного отверстия, выполненного в обратном клапане, а штоко- вая полость гидродемпфера - через дроссельное отверстие его поршня, осевой канал
5 штока и дроссельное отверстие обратного клапана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1525116A2 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| ГИДРОПНЕВМАТИЧЕСКИЙ ДЕМПФЕР | 2001 |
|
RU2216665C2 |
| Гидропривод стреловой самоходной машины | 1987 |
|
SU1583554A1 |
| Гидропривод грузоподъемного механизма лесного манипулятора | 2022 |
|
RU2789167C1 |
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР ДЛЯ ЖЕСТКОГО БУКСИРНОГО УСТРОЙСТВА | 1998 |
|
RU2145011C1 |
| Гидросистема | 1987 |
|
SU1513247A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1999 |
|
RU2147996C1 |
| Телескопический гидравлический амортизатор | 1979 |
|
SU954662A1 |
| Портальный погрузчик | 1980 |
|
SU954371A1 |
Изобретение относится к подъемно- транспортному ма шиностроению, а именно - к манипуляторам, применяемым при ногру- зочно-разгрузочны.х работах. Цель изобретения - повышение надежности и безопасности работы. Манипулятор содержит стрелу, блок управления, датчик усилия, пульт управления и пневмогидроцилиндр с крышками и полым штоком 14, в котором размеп1,ен гидродемпфер с поршнем 21, выполненным с дроссельным отверстием 26, и штоком 14 с осевым каналом, проходяшим через пор- , снабженный предохранительным клапаном 22. При обрыве линии связи отсекается полость 28 гидродемпфера от штоко- вой полости 27 и груз удерживается на высоте. 2 ил.
| Манипулятор | 1980 |
|
SU872251A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
