Изобретение относится к подъемно-транспортным средствам и в частности к портальным погрузчикам.
Известен портальный погрузчик, содержас1Шй смонтированную на колесах раму, снабженную площадкой, на которой шарнирно посредством кронштейна и первой пары силовых цилиндров подъема закреплена стрела, рукоять, шарнирно соединенную со стрелой и связанную со второй парой силовых цилиндров ее поворота, и несущую на конце двухчелюстной захватный орган, челюсти которого связаны между собой третьей парой силовых цилиндров их раздвижения, и систему управления, содержащую первый гидравлический контур, включающий в себя первый распределитель, связанный напорной магистралью с бесштоковыми полостями первой пары цилиндров и сливной магистралью со штоковыми полостями этой пары цилиндров, второй гидравлический контур, включающий в себя распределитель, связанный напорной магистралью с бесштоковыми полостя ми второй пары цилиндров и сливной магистралью со штоковыми полостями этой пары цилиндров, и третий гидравлический контур, включающий
в себя третий, распределитель, связанный напорной магистралью со штоковыми полостями третьей пары силовых цилиндров и сливной магистралью с бесштоковыми полостями этой пары 1 .
Однако в известном погрузчике элементы манипулятора имеют недостаточную надежность вследствие значи10тельной величины действующих на них нагрузок, возникающих при захвате груза от внедрения челюстей захвата в грунт.
Цель изобретения - повышение эф15фективности и надежности путем снижения действующих на элементы нагрузок, возникающих при захвате груза от внедрения челюстей захвата в грунт.
20
Для достижения указанной цели погрузчик снабжен обратным клапаном, установленным между сливной магистралью третьего контура и напорной магистралью первого контура и парой
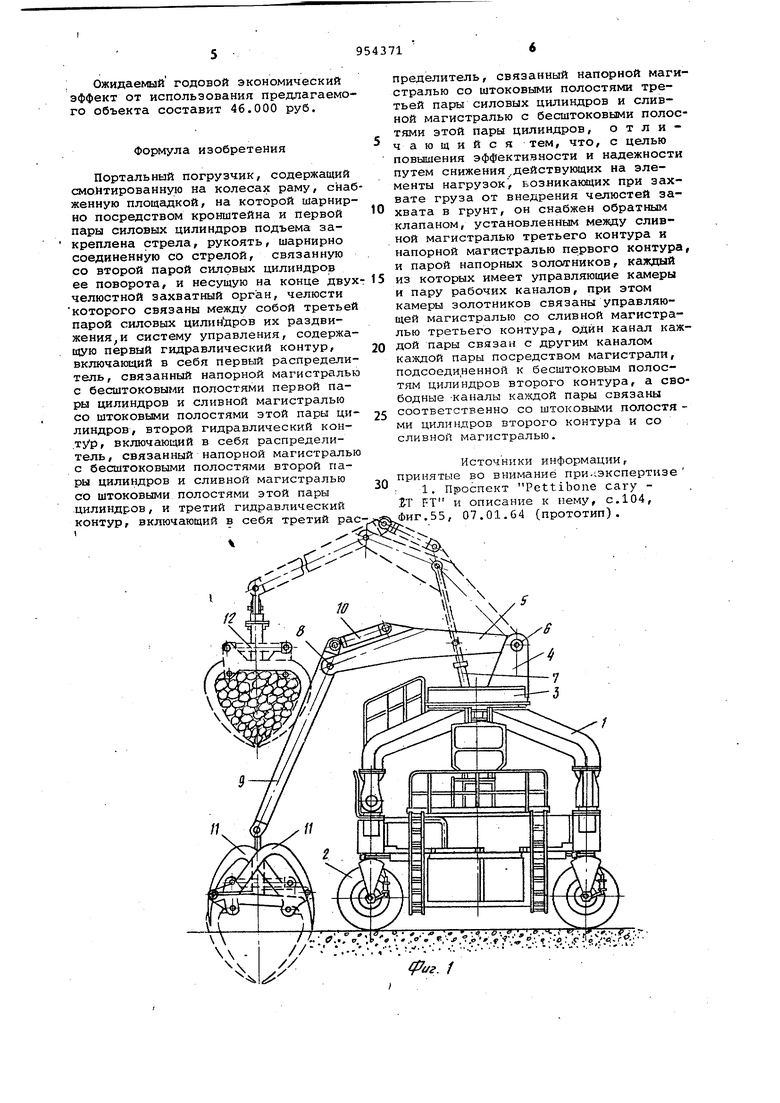
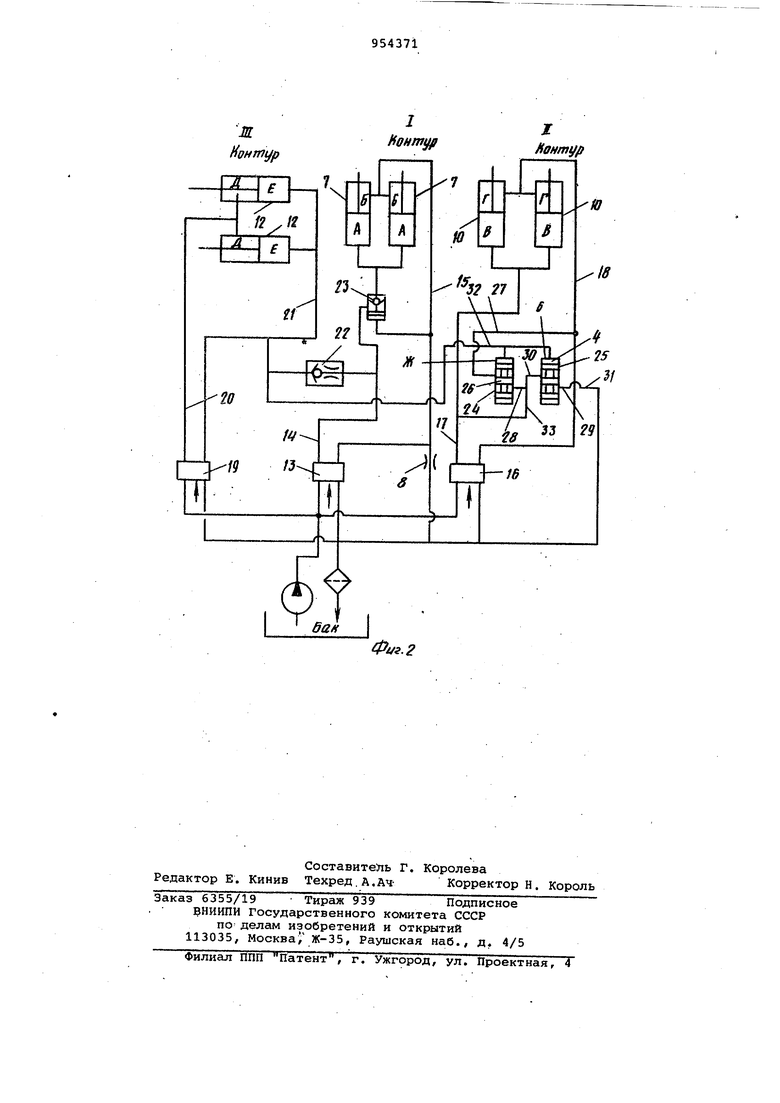
25 напорных золотников, каждый из которых имеет управляющие камеры и пару рабочих каналов, при этом камеры золотников связаны управляющей матистралью со сливной магистралью тре30тьего контура, один канал каждой пары связан с другим каналом каждой пары посредством магистрали, подсобдиненной к бесштоковым прлостям ци.линдров второго контура, а свободные каналы каждой пары Связаны соответственно со штоковыми полостями цилиндров второго контура и со сливной магистралью. . На фиг.1 изображен предлагаемый погрузчик, вид сбоку, на фиг.2 гидравлическая схема управления грузозахватной сист.емой погрузчика. , Портальный погрузчик содержит раму 1, опирающуюся нижней частью на колеса 2. На верхней части рамы установлена площадка 3, к которой прикреплен кронштейн 4. Нижний конец стрелы 5 при помощи шарнира б связан с кронштейном 4. Среднаяя часть стрелы при помощи первой пары силовы цилиндров 7 соединена с площадкой 3. С верхним концом стрелы при помощи шарнира 8 соединена средняя часть рукояти 9. внутренняя часть которой свяэана со стрелой посредством второй пары силовых цилиндров.ее поворо та 10. На наружном конце рукояти 9 подвешен двухчелюстный захватный орган, челюсти 11 которого приводятся третьей парой силовых цилиндров 12, Система управления захватным органом погрузчика содержит первый гидравлический контур, включающий в себя первый распределитель 13, связанный напорной магистралью 14 с бесштоковыми полостяг.1и А первой пары цилиндров 7 и сливной магистралью 15 со .штоковыми полостями 6 этой пары цилиндров , Второй гидравлический контур системйа управления содержит второй распределитель 16, связанный напорной магистралью 17 с бесщтоковыми полостями В второй пары цилиндров 10 и сливной магистралью 18 со штоковыми полостями Г этой пары цилиндров. Третий гидравлический контур системы управления включает в себя третий распределитель 19, связанный напорной магистралью 20 со штоковыми полостями Д третьей пары цилиндрсЯв 12 и сливной магистралью 21 с бесштоковыми полостями Е этой пары силовых цилиндров. Меищу магистралью 21 треTbei o контура и напорной магистралью второго контура установлен обратный клапан 22.«В магистрали 14 первого контура установлен гидрозамок 23. Предусмотрена пара напорных золотников 24 и 25. Золотник 24 имеет управляющую камеру -Ж , плунжер 26 и .пару каналов 27 и 28. Золотник 25 имеет управляющую камеру N-, плунжер 29 и пару каналов 30 и 31. Камеры ,) и И напорных золотников связаны управляющей магистралью 32 с магистралью 21 третьего контура. Канал 28 золотника 24 связан с каналом 30 золотника 25 посредством магистрали 33, подсоединенной к бесштоковым полостям в цилиндров второго контура. Канал 27 золотника 24 связан со штоковьии полостями Г цилиндров второго контура, а канал 31 золотника 25 связан со сливной магистралью. Во время захвата груза, лежащего на грунте с помощью двухчелюстного захватного органа, челюсти 11 последнего начинают смыкаться под действием треть;ей пары цилиндров 12. При упоре челюстей в грунт на них начинает действовать повышенная нагрузка, что является нежелательным, так как может привести к действию чрезмерных нагрузок в грузоподъемном механизме погрузчика. Повышенная нагрузка, действующая на челюсти 11, приводит к перемещению штоков с поршнями цилиндров 12, благодаря чему в бесшто-. ковых полостях .Е этих цилиндров давление жидкости повышается. При этом жидкость из полостей Е поступает через магистраль 21, клапан 22 и гидрозамок 23 в бесштоковые полости А силовых цилиндров 7. В результате штоки этих сияовых цилиндров выдвигаются, обеспечивая подъем стрелы 5 без вмешательства оператора. Одновременно часть жидкости поступает по магистрали 32 в камеры Ж и И золотников 24 и 25. Под действием давления жид-кости плунжеры 26 и 29 перемещаются в положения,, при которых обеспечива-ется проход жидкости из канала 27 в канал 28 и из канала 30 в канал 31. Благодаря этому происходит соединение между собой бесштоковых Б и штоковых полостей цилиндров 10, а избыточная жидкость сливается в бак. В результате порпни цилиндров 10 могут свободно перемещаться и рукоять 9 занимает плавающее положение, что обеспечивает, в процессе захвата груза нежесткую связь между захватным органом и остальной частью грузозахватного механизма (манипулятора), приводит к снижению нагрузок на манипулятор и возможности захвата груза без внедрения в грунт. В этом положении челюсти захватного органа под действием давления цилиндров 12 продолжают смыкаться до полного захвата груза. После окончания захвата груза распределитель 19 устанавливается в нейтральное положение и система управления погрузчика занимает исходное положение. Предлагаемая конструкция погрузчика позволяет повысить надежность элементов манипулятора путем снижения действующих на них нагрузок, возникающих при захвате груза от внедрения челюстей захвата в грунт. ; Ожидаемый годовой экономический эффект от использования предлагаемого объекта составит 46.000 руб. Формула изобретения Портальный погрузчик, содержащий смонтированную на колесах раму, снаб женную площадкой, на которой шарнирно посредством кронштейна и первой пары силовых цилиндров подъема закреплена стрела, рукоять, шарнирно соединенную со стрелой, связанную со второй парой силовых цилиндров ее поворота, и несущую на конце двух челюстной захватный орган, челюсти которого связаны между собой третьей парой силовых цилиндров их раздвижения и систему управления, содержащую первый гидравлический контур, включающий в себя первый распределитель, связанный напорной магистралью с бесштоковыми полостями первой пары цилиндров и сливной магистралью со штоковыми полостями этой пары цилиндров, второй гидравлический контур, включающий в себя распределитель, связанный напорной магистралью с бесштоковыми полостями второй пары цилиндров и сливной магистралью со штоковыми полостями этой пары цилиндров, и третий гидравлический контур, включающий в себя третий рас
/1- (:.;
.
Oj, .. Ь, 1 в V Ч t .. , ffj
b/f/.-../д.«; f .;. vJ.tVt-ч V.; -/f;
ч .
г. 1 пределитель, связанный напорной магистралью со штоковыми полостями третьей пары силовых цилиндров и сливной магистралью с бесштоковыми полостями этой пары цилиндров, отличающийся тем, что, с целью повышения эффективности и надежности путем снижения действующих на элементы нагрузок, ьозникаквдих при захвате груза от внедрения челюстей захвата в грунт, он снабжен обратным клапаном, установленным менаду сливной магистралью третьего контура и напорной магистрсшью netpBoro контура, и парой напорных золол-ников, каждый из которых имеет управляющие камеры и пару рабочих каналов, при этом камеры золотников связаны управляющей магистралью со сливной магистралью третьего контура, один канал каждой пары связан с другим каналом каждой пары посредством магистрали, подсоединенной к бесштоковым полостям цилиндров второго контура, а свободные -каналы каждой пары связаны соответственно со штоковыми полостя ми цилиндров второго контура и со сливной магистралью. Источники информации г принятые во внимание при.экспертизе 1. Проспект Pettibone сагу Я FT и описание к нему, с.104, фиг.55, 07.01.G4 (прототип).
Ж
1
Ж
hoHmyf
Контур
| название | год | авторы | номер документа |
|---|---|---|---|
| Челюстной погрузчик | 1988 |
|
SU1562312A1 |
| Захват к погрузчику | 1985 |
|
SU1279945A1 |
| Портальный погрузчик | 1980 |
|
SU943191A1 |
| Гидравлическая система навесного погрузчика | 1989 |
|
SU1723016A1 |
| Грузоподъемное устройство | 1986 |
|
SU1439068A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| Гидропривод рабочего оборудования фронтального ковшевого погрузчика | 1984 |
|
SU1161673A1 |
| Грузозахватное устройство | 1985 |
|
SU1276610A1 |
| Гидропривод рабочих органов лесозаготовительной машины (его варианты) | 1984 |
|
SU1259527A1 |
| Опрокидыватель транспортных средств | 1988 |
|
SU1720969A1 |
х
25
3/
vz:
29
