. (54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод перемещения стрелы уравновешенного подъемника | 1985 |
|
SU1286498A1 |
| СИЛОВАЯ ГОЛОВКА | 1992 |
|
RU2009784C1 |
| Устройство для съема грузов с захвата подвесного конвейера | 1981 |
|
SU973457A1 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| Система управления пневмогидропреобразователем | 1990 |
|
SU1807248A1 |
| Устройство для поштучной выдачи и приема заготовок | 1986 |
|
SU1388162A1 |
| ПНЕВМАТИЧЕСКИЙ НАСОС СУДОВОЙ СИСТЕМЫ ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2602471C2 |
| УСТРОЙСТВО ДЛЯ СМАЗКИ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ | 2023 |
|
RU2823000C1 |
| Пневмоэлектрогидравлический следящий позиционный привод подачи инструмента | 1974 |
|
SU488450A1 |
| Манипулятор с ручным управлением | 1985 |
|
SU1315288A1 |
I
Изобретение относится к машиностроению, в частности к манипуляторам, и может быть использовано для механизации загрузочно-разгрузочных работ и межоперационных перемещений грузов.
Известно устройство, предназначенное для загрузочно-разгрузочных операций и межоперационных перемещений заготовок, представляющее собой закрепленный к балке силовой пневмоцилиндр с порщнем, щтоком и распределительным золотником, выполненным в виде передвигающейся по порщневому штоку силового пневмоцилиндра обоймы, являющейся рукояткой управления с выточкой для перепуска сжатого воздуха через канал в порщневом щтоке в рабочую полость силового цилиндра при подъеме золотника и груза и для выпуска сжатого воздуха из цилиндра при их опускании. Для удержания золотника в среднем положении и остановки груза в промежуточном положении золотник в нижней части подпружинен 1.
Достоинством данного устройства является простота и невысокая стоимость конструкции, а также возможность .использования устройства в условиях повыщенной взрывоопасности. Однако скорость подъема или опускания груза задана скоростью заполнения сжатым воздухом рабочей полости силового пневмоцилиндра и не может плавно изменяться, вследствие чего устройство обладает очень низкой точностью останова груза, а система управления при помощи обоймы золотника обладает высокой чувствительностью, ив момент окончания вертикального перемещения груза возникают fQ автоколебания груза и, как следствие, высокие динамические нагрузки.
известно также перегрузочное устройство, предназначенное для загрузочно-разгрузочных операций и межоперационного пере 5 мещения заготовок, включающее манипулятор, содержащий привод, выполненный в виде силового цилиндра, порщневой шток которого выходит наружу, ограничивающие упоры и гидравлический амортизатор. Амортизатор представляет собой заполненный
20 жидкостью герметичный цилиндр, расположенный параллельно силовому цилиндру. Внутри амортизирующего цилиндра расположен порщень с двумя противоположными
штоками равного диаметра. На наружном конце одного из штоков установлены регулируемые ограничители, предназначенные для регулирования предела действия амортизатора и манипулятора, в которые упирается специальная тяга, укрепленная на поршневом штоке силового цилиндра. В цилиндре амортизатора имеется сквозной канал с установленным в нем клапаном, регулируюшим тормозящий эффект амортизатора. Этот клапан управляется приводом, проходящим через второй шток амортизирующего цилиндра. Манипулятор захватывает груз и перемещает его от одной позиции к другой при помощи силового цилиндра. При подходе манипулятора к ограничивающим упорам скорость манипулятора гасится гидравлическим амортизатором 2.
Данное устройство обладает сравнительно простой и недорогой конструкцией, обеспечивает высокую точность останова груза и небольшие динамические нагрузки за счет действия гидравлического амортизатора, а также может быть использовано в условиях повышенной взрывоопасности. Однако недостатком его являются очень низкие технологические возможности, так как оно может перемещать груз только в две заранее заданные точки зоны обслуживания, обусловленные установкой регулируемых ограничителей. В условиях, когда требуется перемещение груза в различные точки зоны обслуживания, данное устройство практически неприменимо, так как потребуются очень частые переналадки ограничителей.
Цель изобретения - расширение технологических возможностей мапинулятора путем регулирования скорости перемещения груза и его останова в любой точке зоны обслуживания.
Указанная цель достигается тем, что в устройстве, содержащем установленное на стойке опорно-поворотное устройство с закрепленной на нем рукой, представляющей собой сбалансированную в горизонтальной плоскости щарнирно-рычажную систему, на конце которой установлена поворотная головка с прикрепленным на ней схватом для захвата груза и рукояткой управления, и привод вертикального перемещения груза, привод вертикального перемещения груза выполнен в виде пневмогидравлического цилиндра с краном управления в виде пневматического золотникового распределителя с регулируемым гидродросселем, и следящей замкнутой гидросистемы, связанной с рукояткой управления и краном.
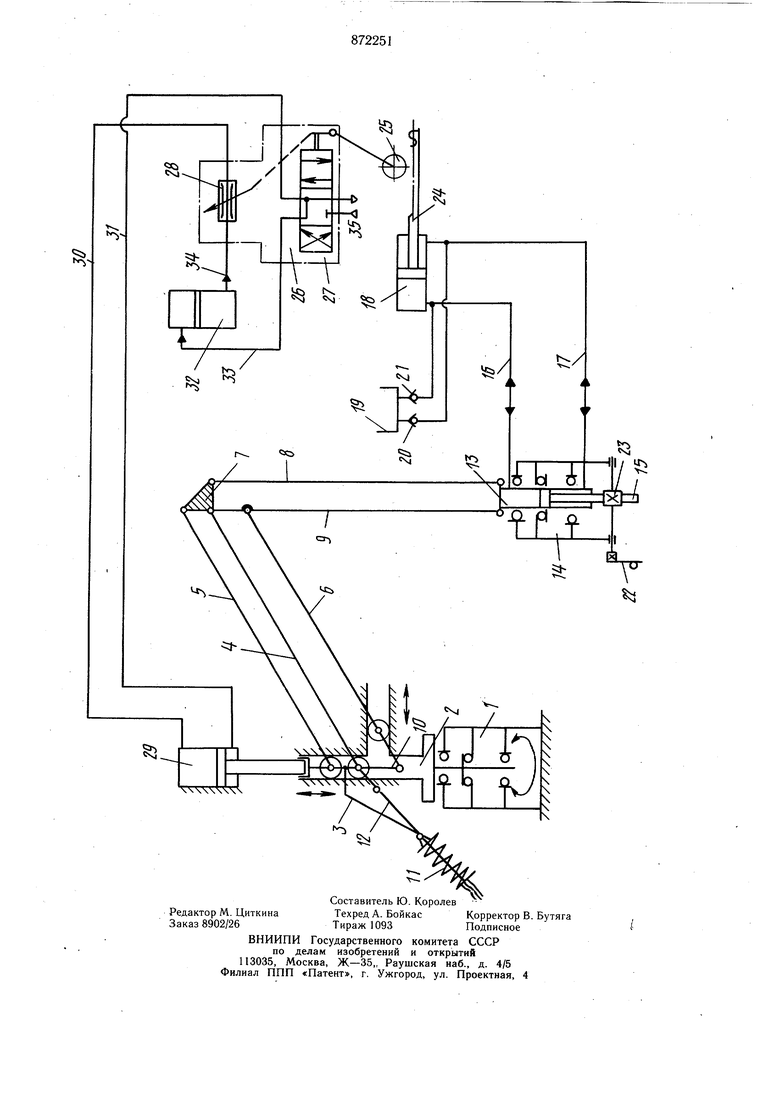
На чертеже изображена кинематическая пневмогидравлическая схема предлагаемого манипулятора.
Манипулятор содержит установленное на основании опорно-поворотное устройство 1, закрепленную на нем руку 2, состоящую из каретки 3, с шарнирно закрепленными на ней и между собой рычагами 4-10,
образующими щарнирно-рычажную систему, уравновешивание которой осуществляется пружиной 11, взаимодействующей через тягу 12 с плечом рычага 10. На конце щарнирно-рычажной системы щарнирно установлен гидроцилиндр 13, на корпусе которого установлена поворотная головка 14. Конец штока 15 гидроцилиндра 13 выполнен в виде рейки. Гидроцилиндр 13 трубопроводами 16 и 17 связан с гидроцилиндром 18, образуя замкнутую следяющую гидросистему. Для восполнения возможных утечек в замкнутой гидросистеме служит бачок 19 с обратными клапанами 20 и 21. В поворотной головке 14 установлена рукоятка управления 22, на оси которой жестко установлена
5 щестерня 23, взаимодействующая со штоком рейкой 15. Шток-рейка 24 гидроцилиндра 18 взаимодействует с шестерней 25, жестко связанной с ручкой управления крана 26, состоящего из пневматического золотникового распределителя 27 и жестко связанного
0 с ним гидродросселя 28. Пневмогидроцилиндр 29, щток которого взаимодействует с кареткой 3 руки 2, служит для вертикального перемещения груза и трубопроводами 30 и 31 связан с краном 26. Пневмогидропреобразователь 32 предназначен для преобразования давления сжатого воздуха в давление жидкости и также связан трубопроводами 33 и 34 с краном управления 26. Подвод сжатого воздуха к крану управления осуществляется по трубопроводу 35.
0 Вертикальное перемещение груза при работе манипулятора осуществляется следующим образом.
В среднем положении крана 26 штоковая полость пневмогидроцилиндра 29 и воздушная полость пневмогидропреобразователя 32
трубопроводами 31 и 33 соединена с атмосферой, а гидродроссель 28 полностью закрыт. Таким образом, груз удерживается на необходимой высоте. Для подъема или опускания груза необходимо повернуть рукод ятку управления 22. При повороте рукоятки управления 22, например, против часовой стрелки, щток-рейка 15 опускается, выдавливая жидкость по трубопроводу 17 в щтоковую полость гидроцилиндра 18, а щтокрейка 24 перемещается влево, поворачивая
5 посредством шестерни 25 кран 26 на угол, соответствующий углу поворота рукоятки управления 22 в зависимости от передаточного отношения шестерен 22 и 25. При этом пневматический золотниковый распределитель 27 перемещается влево, соединяя воз° душную полость пневмогидропреобразователя 32 с подводом сжатого воздуха, а штоковую полость пневмогидроцилиндра 29 с атмосферой. При дальнейшем повороте рукоятки управления 22 пропорционально углу
, ее поворота открывается гидродроссель 28, жидкость под давлением из гидравлической полости пневмогидропреобразователя 32 по трубопроводу 34 через гидродроссель 28
по трубопроводу 30 поступает в бесштоковую полость пневмогидроцилиндра 29, и груз начинает перемещаться вверх со скоростью, соответствующей величине открытия гидродросселя 28.
При возврате рукоятки управления 22 в среднее положение гидродроссель 28 закрывается, перекрывая проход жидкости, а пневматический золотниковый распределитель 27 устанавливается в среднее положение, и перемещаемый груз останавливается в заданной точке зоны обслуживания. Опускание груза происходит, таким образом, поворотом рукоятки управления 22 в обратную сторону.
За счет того, что в предложенном манипуляторе привод вертикального перемещения груза выполнен в виде пневмогидравлического цилиндра с краном управления, выполненным в виде пневматического золотникового распределителя с регулируемым гидродросселем, связанным с рукояткой управления и краном, он позволяет изменять скорость подъема или опускания груза от нуля до заданной, что обеспечивает высокую точность останова груза в любой точке зоны обслуживания и незначительные динамические нагрузки, сравнительно дешев и прост по конструкции и может быть использован в УСЛОВИЯХ повышенной взрывоопасности. Связанная с рукояткой управления и краном замкнутая следящая гидросистема не требует постороннего источника энергии, позволяет расположить рукоятку управления в любом, наиболее удобном для обслуживания манипулятора месте, а кран, управляющий пневмогидроцилиндром, разместить в непосредственной близости с ним, что до минимума укорачивает трубопроводы, уменьшая до минимума падение давления в них.
Формула изобретения
Манипулятор, содержащий установленное на стойке опорно-поворотное устройство
с закрепленной на нем рукой, представляющей собой сбалансированную в горизонтальной плоскости шарнирно-рычажную систему, на конце которой установлена поворотная головка со схватом для захвата груза и
.рукояткой управления, а также привод вертикального перемещения груза, отличающийсятем, что, с целью расширения технологических возможностей путем регулирования скорости перемещения груза и его останова в любой точке зоны обслуживания, привод
вертикального перемещения груза выполнен в виде пневмогидравлического цилиндра с краном управления в виде пневматического золотникового распределителя с регулируемым гидродросселем, и замкнутой следящей гидросистемы, связанной с рукояткой управления и краном.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 148890, кл. В 66 F 1/08, 1952.
