(Л
СП
го
СП
Oi
Изобретение относится к подъемным устройствам и может быть использовано для механизации иогрузочно-разгрузочных работ конвейеров, станочного оборудования и т.д.
Цель изобретения повышение точности позиционирования путем уменыпеция инерционности.
На фиг. 1 изображен манипулятор, общий вид; на фи1. 2 - пнeвмoгидp()цилиtlдp.
Манипулиго) (фиг. 1) содержит онорпо- новоротное ус1)ойство 1, корпус 2, горизонтальные 3 и вертикальные 4 направляющие, ц арнирно-рычажный механизм 5, пружинное устройство 6, б. кж 7 управления, датчик 8 усилия, пневмошдроцилиндр 9, карсгкн 10 и рукоягки 11 управления.
Пневмог идроцилиндр (фи1. 2) coci )ит из корпуса 12, 11()и1ня Ii3, пггока 14, ги.1, жом- пенсаторов 15 и 16, гидродемпфера 17. Гидродемпфер имеет осевой кана. 1 18, проходя- щий че)с nopinenb 19, и дроссельное отверстие 20, л ijiK.Kf через предохрапите,|1ьнь Й 21 и обр;ггны11 22 ч. ишпньг
11ре.и)л()с1ПИ1е.1ьи1лй клапан 21 закреплен па порт И 19 со cropoiibi компенсатора 16 и содержит нормально открытый клапан 23 под Д1. iR-i :;iieM пружипь 25 и )адиа,:1ьпо- осевоГ| капал 24.
()6 iaiiibui клапап 22 закреплсп на гидро дем11фе1)е 17 со стороны гидрокомпепсатора 15 и содержит кланап 26, пружину 27 и дроссе. н.пое отверстие 28.
В ПОЛОС и гидрокомпепсаторов 15 и 16 размеп1е 11 1 пс11(1.1впжн1,1е 29 и 30 и юдвиж- ные 31 и 32, дпски с()С1()ятие из ностоян- ных магниюи, обра пеннЬ)1х друг к другу одноименными полюсами попарно, которые обеспечивают плавак)1ии11 3aMKn TtjA 1Ю1,ем жидкости, постоянное давление н пневмог и.ч роцилиндре и С11()с(.)бствуют плар.нхк ти и точности позиционирования стре.1Ы манинуля тора.
Манипулятор работает с, 1едукмцим образом.
Шарнирно-рычажный механизм 5 (стре ла) с грузом и без груза воздействует через каретку 10, на датчик 8 усилия, который выдает сигнал в блок 7 управления.
Усиленный сигнал из блока 7 управления поступаег в пневматическую 11олост1 .)6 1нев- могидропи.тиндра 12. Давление в ппевмати- ческой полости 36 устанавливается в зависимости от массы груза, т.е. давтснме ежа- того В1) уравновешивает массу г)уза.
Для под1,ема или опускания .а оператор поворачивает рукоятку 11 у11)авлепия в cooTBi U I вующее по. южсппе, сигнал поступает в б.ток 7 управления, а соот0
5
g
5
0
5
0
ветственно усиливает или уменьшает давление в пневматической полости 36 пневмогид- роцилипдра 12, что приводит к перемещению
поршня 13 и штока 14.
При перемеп1ении поршня 13 пневмогид- ропили}1дра вверх ц-роисходит опускание груза, при этом поршень 19 гидродемпефера остается неподвижным и жидкость из компенсатора 16 через радиальпо-осевой канал 24 отк)ывает клапап 23, вытекает через отверс тие 18 в Полость 33, а избыток жидкости, равный Г азн. устн об:,:. , И-кгей 33 и 34, чсре.з oceBoii капа.1 18 и .1россе:1ьное отверс- гш 28 вьггекгк 1 и im/iorn, 35 (дрокомпенса- тора 15.
При перемещении порщня 13 впиз происходит подъем груза, жидкость из полости 33 вытесняется через дроссельное отверстие 20 и открытый предохранительный клапан 21 в полость 34 компенсатора 16, часть жидкости, которая )1еобходима для пополнения разнос- гп п(1лост( й 34 и 33 г идродемпфе)а, поступаег из компепеатора 15 че)ез обрат- клапан 26 под воздействием ма1 нитных парп1)1х дисков 31 и 32.
Пропускная способность обратпо1 о клапана 2() paiiHa пропускной способности пре- дохраптчмьпого клапана 21, но бо.плпе про- пускпои |, и(собпо(. гп Д|)оссе. 1ьног(1 сп верс- тии 28.
( корос1ь перемеп1ения поршня 13. а с,1ед()ват е. 1ьпо, и rpv ci .. мсит (/i в(мичины приращения д;:РЛ1-1; :я и пневматической по- ;1ости 3ii и гт;1;7 . п. лч тся 1 редоч;)анит ,.ль- Щ)1м K.iaiuiHOM 21, пружиной 25 и дисками постояппых ма1 i nioii, 1)б)а1ценных друг к другу одроимепными полюсами и рач.мещен- ных в по. Иктях гидроко.мпенсатора 15 и 16.
I Ijni Mi новенной утечке воздуха в блоке 7 ,тепин или в линиях связи с нпевмогид- |К)пи,П(ндрс)м исчезает уравновешивающая сила и возрастает усилие со стороны штока 14.
Под действием возроси1его усилия увеличивается перепад давления на предохранительном клапане 21, что приводит к перекрытию oceBoi o канала, и полость 34 гидроко.мпенсатора 16 за |ирается от 1птоковой патос- ти 33 и груз удерживается на высоте.
Формула изобретения
A ai;Hi;y. гор по авт. св. № 140957М, отличающийся тем, что, с целью повышения т)чности позиционирования путем у.ченьше- ния яперанонности, гидрокомпанесатор снаб- ;iMH постоянными магнитами, установленными 11оп11)по одноименными полнк амп друг к другу в СИ) полостя.ч н выг1о,1пепными в виде ДИСК(.)В.
31
м
-JS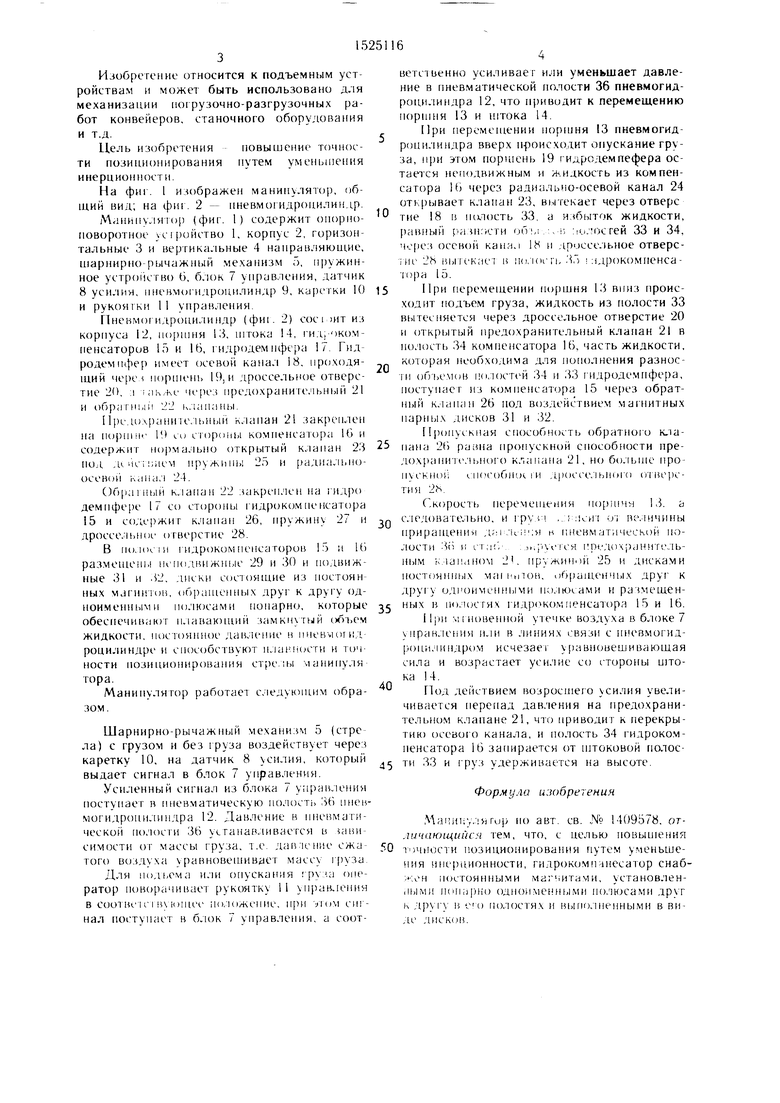
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1409578A1 |
| Установка для формования полых оболочек (ее варианты) | 1982 |
|
SU1101312A1 |
| Устройство для активной подачи нити | 1978 |
|
SU852980A1 |
| Транспортное средство | 1984 |
|
SU1193046A1 |
| Пневмогидравлический гайковерт | 1960 |
|
SU141106A1 |
| Гидродемпфер двухстороннего действия | 1983 |
|
SU1138567A1 |
| Манипулятор | 1980 |
|
SU872251A1 |
| Устройство для управления перемещением горного комбайна | 1988 |
|
SU1525272A1 |
| ПОЛУАВТОМАТ ДЛЯ МНОГОМЕРНОГО КОНТРОЛЯ ПОДШИПНИКОВ | 1990 |
|
RU2089846C1 |
| Тормозной регулятор для транспортных средств | 1978 |
|
SU744164A1 |
Изобретение относится к подъемно-транспортному машиностроению. Цель изобретения - повышение точности позиционирования путем уменьшения инерционности. Манипулятор содержит опорно-поворотное устройство 1, шарнирно-рычажный механизм 5, блок 7 управления, датчик 8 усилия, пневмогидроцилиндр 9 и каретки 10. В полостях гидрокомпенсаторов пневмогидроцилиндров размещены попарно постоянные магниты, выполненные в виде дисков и установленные одноименными полюсами друг к другу. Скорость перемещения поршня пневмогидроцилиндра, а следовательно, и груза стабилизируется, кроме прочего, дисками постоянных магнитов. 2 ил.
23 29 Фаг.2
| Манипулятор | 1986 |
|
SU1409578A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
