СП
00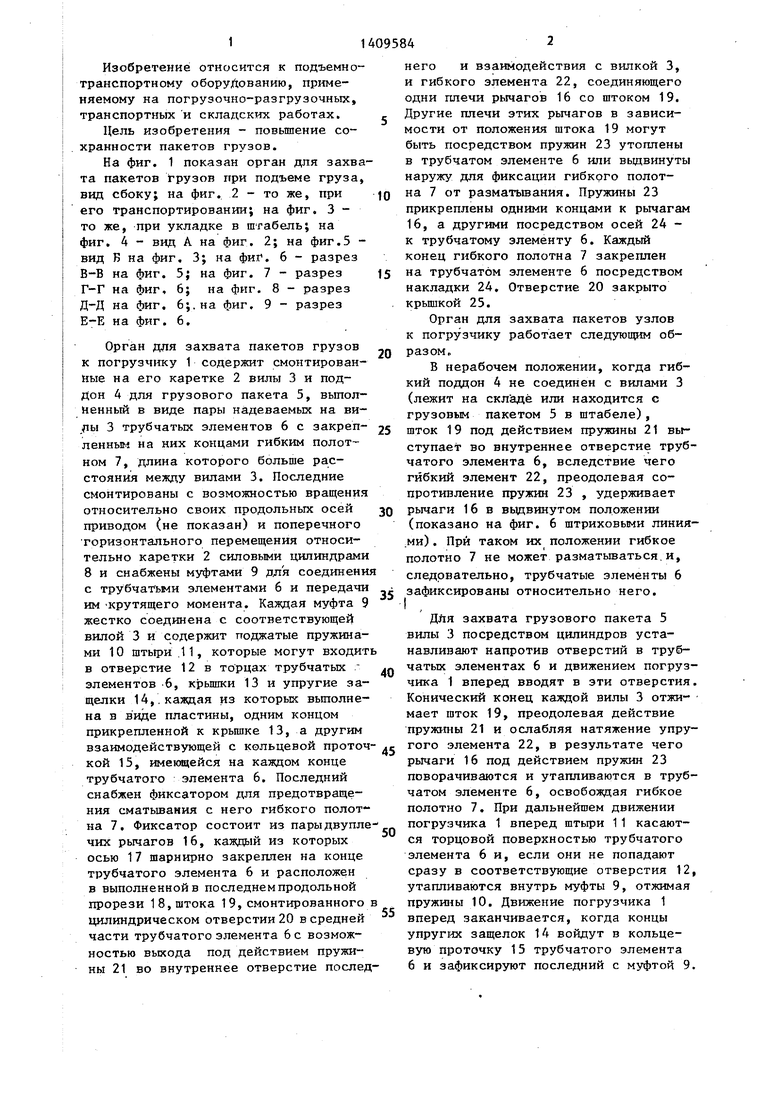
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват погрузчика | 1990 |
|
SU1728126A1 |
| Грузоподъемник погрузчика | 1985 |
|
SU1296507A1 |
| ИГРУШКА "САМОХОДНЫЙ ПОГРУЗЧИК" ВЕРТКИНА М.С. | 1990 |
|
RU2018341C1 |
| Опрокидыватель контейнеров | 1985 |
|
SU1298184A1 |
| Опрокидыватель контейнеров | 1990 |
|
SU1832111A2 |
| Погрузочное устройство для складирования пакетного груза | 1972 |
|
SU541787A1 |
| Грузозахватное приспособление к погрузчику | 1986 |
|
SU1368257A1 |
| Навесное устройство к погрузчику для перегрузки грузов в кипах | 1990 |
|
SU1791371A1 |
| Опрокидыватель контейнеров | 1986 |
|
SU1323527A2 |
| Поддон | 1986 |
|
SU1364545A1 |
Изобретение относится к подъемно-транспортному оборудованию, при- менйемому на погрузочно-разгрузочных, транспортных и складских работах. Цель изобретения - повьшение сохранности пакетов грузов. Навесное оборудование к погрузчику содержит ;смонтированные на его каретке 2 вилы |3 и гибкий поддон 4 для грузового пакета 5, выполненный в виде пары надеваемых на вилы 3 трубчатых элементов 6 с закрепленным на них своими концами гибким полотном 7, длина которого больше расстояния между випа- ми 3. Последние смонтированы .с возможностью вращения относительно - своих продольных осей приводом и поперечного горизонтального перемещения относительно каретки 2 силовьюс цилиндрами 8 и снабжены муфтами для соединения с трубчатьми элементами 6 и передачи им крутящего момента. Каждый трубчатый элемент 6 снабжен фиксатором для предотвращения сматывания с него гибкого полотна 7, смонтированным с возможностью взаимодействия с вилой 3 при введении последней в трубчатый элемент 6. 9 ил. вид А - (Л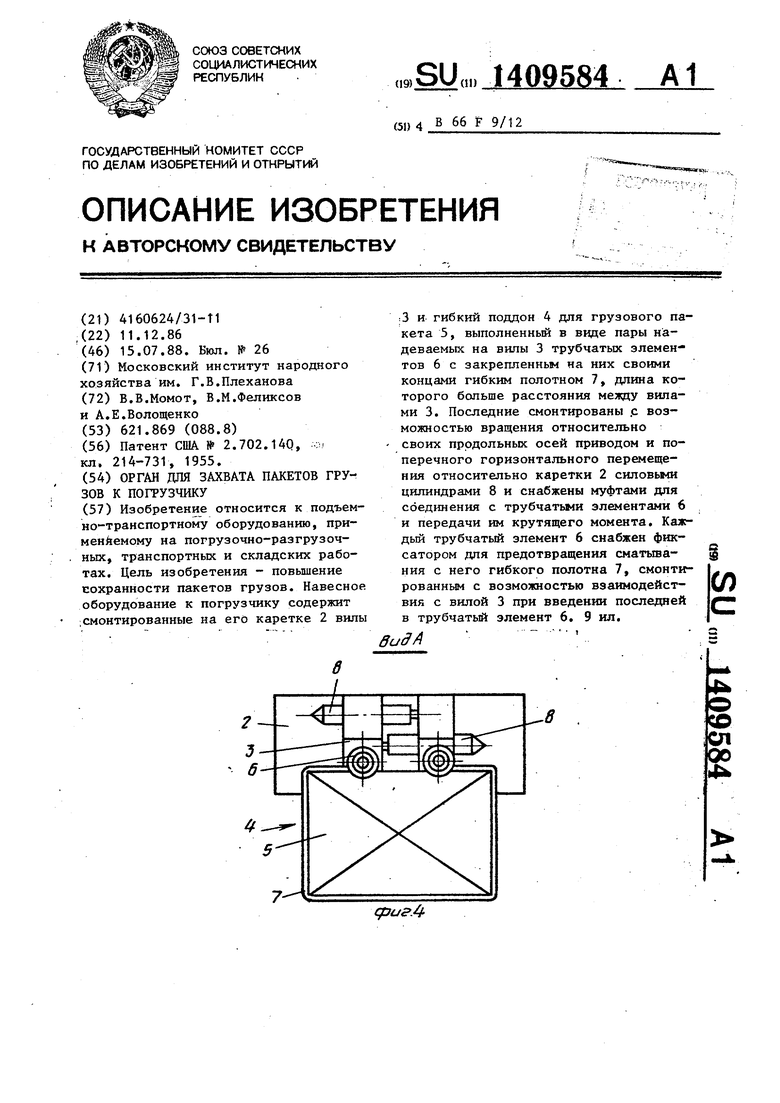
дзиг.
Изобретение относится к подъемно- транспортному оборудованию, применяемому на погрузочно-разгрузочных, транспортных и складских работах.
Цель изобретения - повьшение сохранности пакетов грузов.
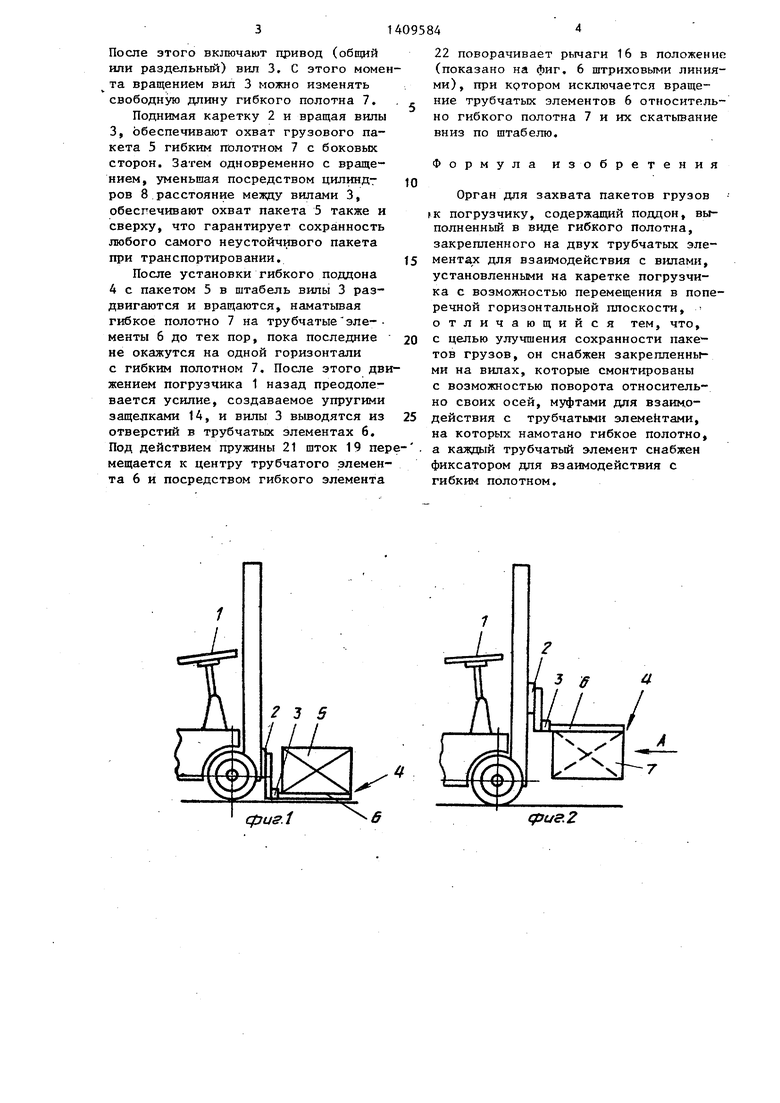
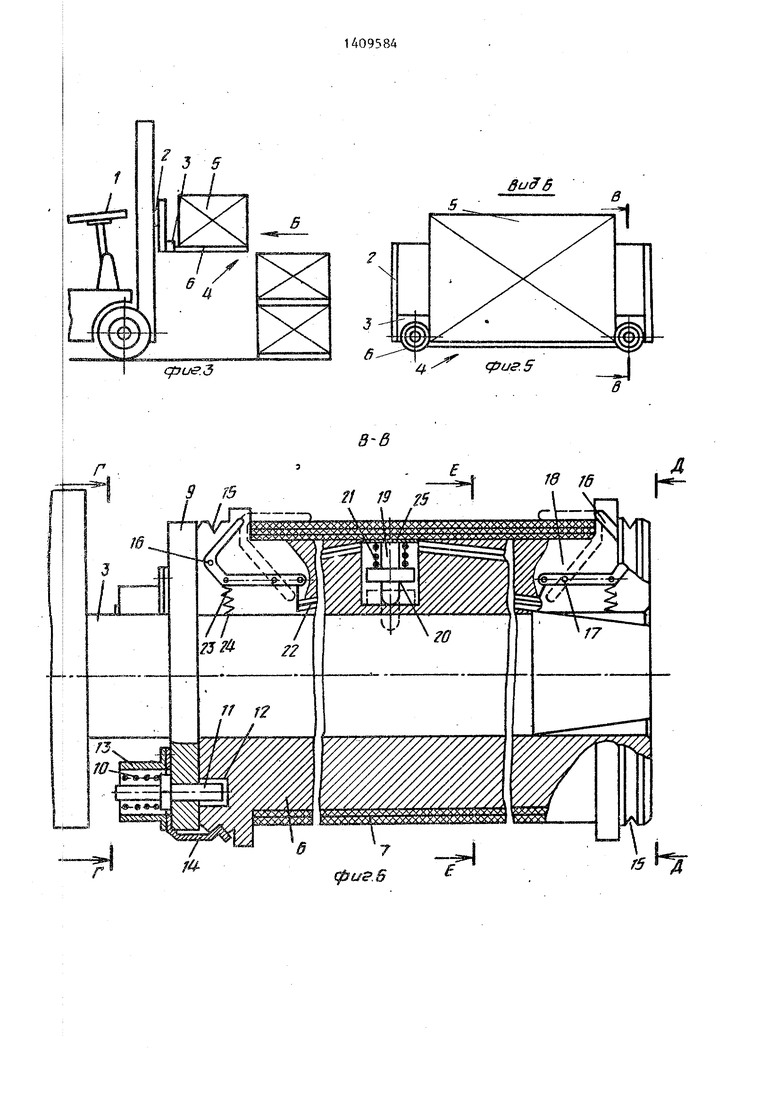
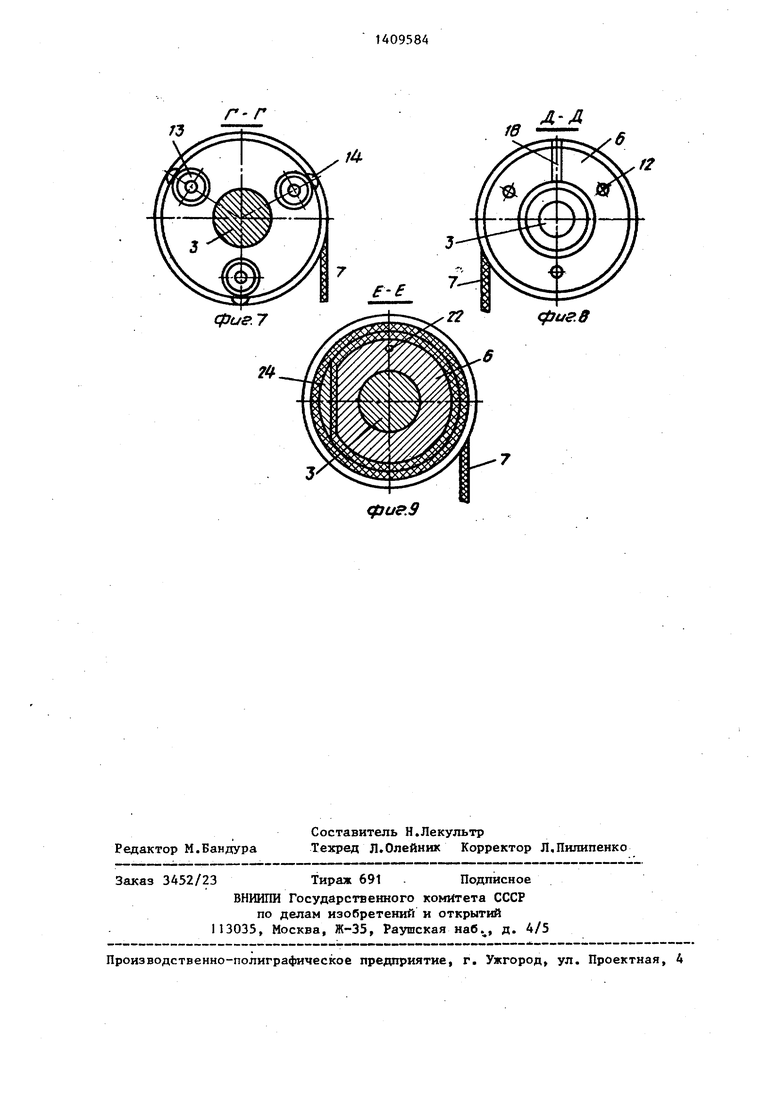
На фиг. 1 показан орган для захвата пакетов грузов при подъеме груза, вид сбоку; на фиг. 2 - то же, при его транспортировании; на фиг. 3 - то же, при укладке в штабель; на фиг. 4 - вид А на фиг. 2; на фиг.5 - вид Б на фиг. 3; на фиг. 6 - разрез В-В на фиг. 5; на фиг. 7 - разрез Г-Г на фиг. 6; на фиг. 8 - разрез Д-Д на фиг. 6;. на фиг. 9 - разрез Е-Е на фиг. 6.
Орган для захвата пакетов грузов к погрузчику 1 содержит смонтированные на его каретке 2 вилы 3 и поддон 4 для грузового пакета 5, вьшол- ненный в виде пары надеваемых на ви- лы 3 трубчатых элементов 6 с закрепленным на них концами гибким полотном 7, длина которого больше расстояния между вилами 3. Последние смонтированы с возможностью вращения относительно своих продольных осей приводом (не показан) и поперечного горизонтального перемещения относительно каретки 2 силовыми цилиндрами 8 и снабжены муфтами 9 для соединени с трубчатьми элементами 6 и передачи им Крутящего момента. Каждая муфта 9 жестко соединена с соответствующей вилой 3 и содержит поджатые пружинами 10 штыри .11, которые могут входит в отверстие 12 в торцах трубчатых элементов 6, крьшжи 13 и упругие защелки 14,.каждая из которых выполнена в в иде пластины, одним концом прикрепленной к крьппке 13, а другим взаимодействующей с кольцевой проточкой 15, имеющейся на каждом конце трубчатого элемента 6. Последний снабжен фиксатором для предотвращения сматьшания с него гибкого полотна 7. Фиксатор состоит из пары двуплечих рычагов 16, кажда1й из которых осью 17 шарнирно закреплен на конце трубчатого элемента 6 и расположен в выполненной в последнем продольной прорези 18, штока 19, смонтированного цилиндрическом отверстии 20 в средней части трубчатого элемента 6 с возможностью выхода под действием пружины 21 во внутреннее отверстие послед
0
5
0
5
0
5
0
5
него и взаимодействия с вилкой 3, и гибкого элемента 22, соединяющего одни гшечи рычагов 16 со штоком 19. Другие плечи этих рычагов в зависимости от положения штока 19 могут быть посредством пружин 23 утоплены в трубчатом элементе 6 или вьщвинуты наружу для фиксации гибкого полотна 7 от разматьшания. Пружины 23 прикреплены одними концами к рычагам 16, а другими посредством осей 24 - к трубчатому элементу 6. Каждый конец гибкого полотна 7 закреплен на трубчатом элементе 6 посредством накладки 2А. Отверстие 20 закрыто крьш1кой 25.
Орган для захвата пакетов узлов к погрузчику работает следующим образом.,
В нерабочем положении, когда гибкий поддон 4 не соединен с вилами 3 (лежит на склйдё или находится с грузовым пакетом 5 в штабеле), шток 19 под действием пружины 21 вьг- ступает во внутреннее отверстие трубчатого элемента 6, вследствие чего гибкий элемент 22, преодолевая со- протшзление пружин 23 , удерживает рычаги 16 в вьщвинутом положении (показано на фиг. 6 штриховыми линия- .ми). При таком их положении гибкое полотно 7 не может разматываться,и,
следовательно, трубчатые элементы 6 зафиксированы относительно него. I
Для захвата грузового пакета 5 вилы 3 посредством цилиндров устанавливают напротив отверстий в трубчатых элементах 6 и движением погрузчика 1 вперед вводят в эти отверстия. Конический конец каждой вилы 3 отжимает шток 19, преодолевая действие пруж1шы 21 и ослабляя натяжение упругого элемента 22, в результате чего рычаги 16 под действием пружин 23 поворачиваются и утапливаются в трубчатом элементе 6, освобоядчая гибкое полотно 7. При дальнейшем движении погрузчика 1 вперед штьфи 11 касаются торцовой поверхностью трубчатого элемента 6 и, если они не попадают сразу в соответствующие отверстия 12, утапливаются внутрь муфты 9, отжимая пружины 10. Движение погрузчика 1 вперед заканчивается, когда концы упругих защелок 14 войдут в кольцевую проточку 15 трубчатого элемента 6 и зафиксируют последний с муфтой 9.
После этого включают привод (общий или раздельный) вил 3, С этого момента вращением вил 3 можно изменять свободную длину гибкого полотна 7.
Поднимая каретку 2 и вращая вилы 3, обеспечивают охват грузового пакета 5 гибким полотном 7 с боковых сторон. Затем одновременно с вращением, уменьшая посредством цилиндт ров 8 расстояние мелзду вилами 3, обеспечивают охват пакета 5 также и сверху, что гарантирует сохранность любого самого неустойчивого пакета при транспортировании.
После установки гибкого поддона 4 с пакетом 5 в штабель вилы 3 раздвигаются и вращаются, наматьгоая гибкое полотно 7 на трубчатые эле- менты 6 до тех пор, пока последние не окажутся на одной горизонтали с гибким полотном 7, После этого двжением погрузчика 1 назад преодолевается усилие, создаваемое упругими защелками 14, и вилы 3 выводятся из отверстий в трубчатых элементах 6, Под действием пружины 21 шток 19 пе мещается к центру трубчатого элемента 6 и посредством гибкого элемента
CfJUff.i
22 поворачивает рычаги 16 в положени (показано на фиг. 6 штриховыми линиями), при KQTopoM исключается вращение трубчатых элементов 6 относительно гибкого полотна 7 и их скатьтание вниз по щтабелю.
Формула изобретения
Орган дпя захвата пакетов грузов
fK погрузчику, содержащий подцон, выполненный в виде гибкого полотна, закрепленного на двух трубчатых элементах для взаимодействия с вштами, установленными на каретке погрузчика с возможностью перемещения в поперечной горизонтальной плоскости, отличающийся тем, что, с целью улучшения сохранности паке тов грузов, он снабжен закрепленными на вилах, которые смонтированы с возможностью поворота относительно своих осей, муфтами для взаимодействия с трубчатыми элемейтами, на которых намотано гибкое полотно, а каждый трубчатый элемент снабжен фиксатором для взаимодействия с гибким полотном.
6
(риг. 2
/5
Г- Г
л-л
риг.9
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
