Изобретение относится к подъемно- транспортному оборудованию и может быть использовано для перегрузки пакетов груза в стропконтейнерах и механизированного снятия строп-контейнеров с пакетов.
Известен штыревой захват к погрузчику для перегрузки пакетов в строп-контейнерах. Однако для освобождения груза от строп-контейнера при использовании этого захвата грузовые места необходимо перекладывать.
Известен захват к погрузчику, содержащий каретку, установленную с возможностью поперечного перемещения с помощью
привода, смонтированные на ней вилы и сталкиватель, установленный с возможностью перемещения вдоль сил с помощью привода. Однако и этот захват требует ручной перекладки груза для освобождения его от стропов.
Известен также захват к погрузчику, содержащий смонтированные на каретке последнего вилы, по меньшей мере одна из которых снабжена закрепленным на ее свободном конце и выступающим над ней захватом в щиде tpJJOKa для удержания средства пакетирования и установленный с возможностью перемещения вдоль вил приводом сталкиватель. Однако и этот захват не обладает возможностью освободить груз от строп-контейнера.
Цель изобретения - расширение функциональных возможностей захвата путем обеспечения механизированного освобождения пакета груза от строп-контейнера.
Указанная цель достигается тем, что захват к погрузчику, содержащий смонтированные на каретке последнего вилы, по меньшей мере одна из которых снабжена закрепленным на ее свободном конце и выступающим над ней захватом в виде крюка и установленный с возможностью перемещения вдоль вил приводом сталкиватель, снабжен гибкими элементами, одни концы которых закреплены на каретке, а на других смонтированы с возможностью взаимодействия со строп-контейнерами дополнительные захваты, Гибкие элементы закреплены на каретке посредством барабанов с пружинным приводом. Новая совокупность признаков предлагаемого захвата имеет существенные отличия от известных технических решений. Захваты в виде вытянутого крюка на свободных концах вил при сталкивании пакета с вил вступают во взаимодействие с нижними лентами стропконтейнера, которые попадают в пазы захвата и при дальнейшем движении сталкивателя вытягиваются из-под пакета. Дополнительные захваты в виде карабинов, зацепленные за боковые ветви строп-контейнера, обеспечивают равномерное стягивание его с пакета. Гибкие элементы с возможностью изменени-я их длины повышают удобство соединения захватов с лентами строп-контейнера, а возможность постоянно находиться в натянутом состоянии, благодаря барабану с пружинным приводом, обуславливает наиболее эффективное сочетание с движущимися узлами устройства, простоту и удобство в работе.
Новая совокупность признаков предлагаемого захвата наряду с механизированным освобождением вил захвата от груза путем сталкивания его приводным сталки- вателем обуславливает возможность механизированного снятия строп-контейнера с
пакета, что расширяет функциональные возможности захвата и повышает производительность, так как обе функции выполняются одновременно. Предлагаемый захват создает предпосылки для его широ0 кого внедрения в портах и цехах перерабатывающих предприятий.
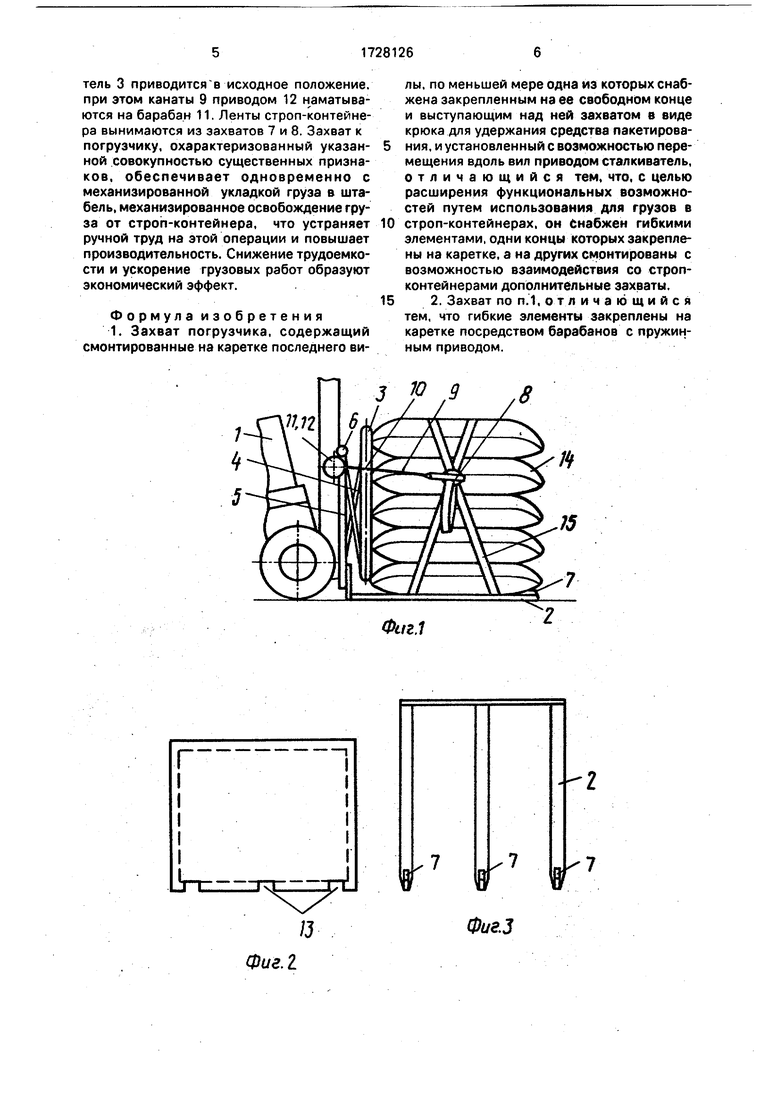
На фиг.1 изображен захват с пакетом, вид сбоку; на фиг,2 - плита сталкивателя, вид спереди; на фиг.З - вилы, вид сверху.
5 Захват к погрузчику 1 содержит вилы 2 и сталкиватель 3 с приводом 4, смонтированные на каретке 5, установленной с возможностью поперечного перемещения приводом 6. По меньшей мере одна из вил
0 2 снабжена смонтированным на ее свободном конце захватом 7 в виде вытянутого крюка, выступающего над вилой. По краям сталкивателя 3 размещены в подвешенном положении дополнительные захваты 8, сое5 диненные с кареткой 5 гибкими элементами 9, например, в виде канатов, пропущенных, например, через скобы 10 на сталкивателе 3. Гибкие элементы 9 установлены с возможностью изменения длины, для чего они
0 закреплены на барабанах 11, смонтированных на каретке 5, и снабженных, например, пружинным приводом 12. В нижней части сталкивателя выполнены пазы 13.
Захват к погрузчику работает следую5 щим образом.
Погрузчик 1 подъезжает, например, к гребенчатому поддону, на котором установлен пакет 14 в строп-контейнере 15. С помощью привода 6 смещением каретки 5
0 вилы 2 наводятся в зазоры между гребнями поддона. Движением вперед погрузчик 1 заводит вилы 2 между гребнями поддона, поднимает пакет 14 и транспортирует его известным образом, например, в вагон. Пе5 ред установкой пакета 14 в штабель один из узлов строп-контейнера 15 ослабляется, захваты 8 заводятся за ленты строп-контейнера 15. Погрузчик 1 устанавливает пакет 14 в штабель и выдвигает сталкиватель 3, одно0 временно отъезжая от пакета. При этом вилы захвата выходят,из-под пакета 14, захват 7, продвигаясь между соседними мешками, надвигается ленты строп-контейнера, которые попадают в паз захвата 7 и
5 стягивает их с пакета 14. Одновременно канаты 9, сматываясь с барабана 11 .вытягиваются на полную длину и стягивают с пакета боковые ветви и верхний пояс строп-контейнера 15. Погрузчик 1 отъезжает от пакета 14, приводом 4 сталкиватель 3 сталкиватель 3 приводится в исходное положение, при этом канаты 9 приводом 12 наматываются на барабан 11. Ленты строп-контейнера вынимаются из захватов 7 и 8. Захват к погрузчику, охарактеризованный указанной совокупностью существенных признаков, обеспечивает одновременно с механизированной укладкой груза в штабель, механизированное освобождение груза от строп-контейнера, что устраняет ручной труд на этой операции и повышает производительность. Снижение трудоемкости и ускорение грузовых работ образуют экономический эффект.
Формула изобретения 1. Захват погрузчика, содержащий смонтированные на каретке последнего вилы, по меньшей мере одна из которых снабжена закрепленным на ее свободном конце и выступающим над ней захватом в виде крюка для удержания средства пакетирования, и установленный с возможностью перемещения вдоль вил приводом сталкиватель, отличающийся тем, что, с целью расширения функциональных возможностей путем использования для грузов в
строп-контейнерах, он Снабжен гибкими элементами, одни концы Которых закреплены на каретке, а на других смонтированы с возможностью взаимодействия со стропконтейнерами дополнительные захваты.
2. Захват по п.1, о т л ичающийся тем, что гибкие элементы закреплены на каретке посредством барабанов с пружинным приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПАКОВОЧНЫЙ КОМПЛЕКТ АХУНДОВА ДЛЯ ПАКЕТИРОВАНИЯ МЕШКОВ С ГРУЗОМ | 2005 |
|
RU2284287C1 |
| Навесное оборудование к погрузчику | 1986 |
|
SU1351875A1 |
| Захват для бочек к погрузчику | 1986 |
|
SU1368259A1 |
| Устройство для подъема и транспортирования пакетов груза в строп-контейнерах | 1977 |
|
SU742370A1 |
| Установка для упаковки изделий | 1981 |
|
SU1034949A1 |
| Комбинированное навесное приспособление к вилочному погрузчику | 1985 |
|
SU1260329A1 |
| ТРАВЕРСА ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ДЛИННОМЕРНЫХ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ | 1973 |
|
SU387916A1 |
| Орган для захвата пакетов грузов к погрузчику | 1986 |
|
SU1409584A1 |
| Навесное устройство к погрузчику для перегрузки грузов в кипах | 1990 |
|
SU1791371A1 |
| Устройство для обжатия материалов | 1989 |
|
SU1722870A1 |
Изобретение может быть использовано для перегрузки пакетов груза в строп-контейнерах и механизированного снятия строп-контейнеров с пакетов. Цель изобретения - расширение функциональных возможностей путем использования для грузов в строп-контейнерах. Захват к погрузчику 1 содержит вилы 2 и сталкиватель 3 с приводом 4, смонтированные на каретке 5, установленной с возможностью поперечного перемещения приводом 6. По меньшей мере одна из вил 2 снабжена смонтированным на ее свободном конце захватом 7 в виде крюка, выступающего над вилой 2. По краям сталкивателя 3 размещены в подвешенном положении дополнительные захваты 8, соединенные с кареткой 5 канатами 9, пропущенными через скобы 10 на сталкивателе 3. Канаты 9 закреплены на барабане 11, смонтированном на каретке 5 и снабженном пружинным приводом 12. В нижней части сталкивателя 3 имеются пазы для свободного прохода захватов 7. Погрузчик 1 подъезжает, например, к гребенчатому поддону, на котором установлен пакет 14 в строп-контейнере 15. Смещением каретки 5 приводом 6 вилы 2 наводятся в зазоры между гребнями поддона. Движением вперед погрузчик 1 заводит вилы 2 между гребнями поддона, поднимает пакет 14 и транспортирует его известным образом, например, в вагон. Перед установкой пакета 14 в штабель один из узлов 17 строп-контейнера 15 ослабляется, захваты 8 заводятся за ленты строп-контейнера 15. Погрузчик 1 устанавливает пакет 14 в штабель и выдвигает сталкиватель 3, одновременно отъезжая от пакета 14. При этом вилы 2 выходят из-под пакета 14, захват 7, продвигаясь между соседними мешками, надвигается на нижние ленты строп-контейнера 15, которые заходят в паз захвата 7, и стягивает их с пакета 14. Одновременно канаты 9, сматываясь с барабана 11, вытягиваются на полную длину и стягивают с пакета 14 боковые ветви и верхний пояс строп-контейнера 15. Погрузчик 1 отъезжает от пакета 14, приводом Л сталкиватель 3 приводится в исходное положение, при этом канаты 9 приводом 12 наматываются на барабан 11. Ленты строп-контейнера 15 вынимаются из захватов 7 и 8. Ленты строп-контейнера 15 вынимаются из захватов 7 и 8. 1 з. п. ф-лы, 3 ил. (Л С vj ю 00 го о
| Патент США N° 3209926, кл, 214-38, 1965г. |
