со
СП
СО
FNJ
Изобретение относится к горнорудной промышленности и может быть, в частности, 1спользовано при разработке крутых и кру- онаклонных угольных пластов механизированными комплексами и агрегатами.
Целью изобретения является повышение надежности работы датчика при воздействии на него динамических нагрузок.
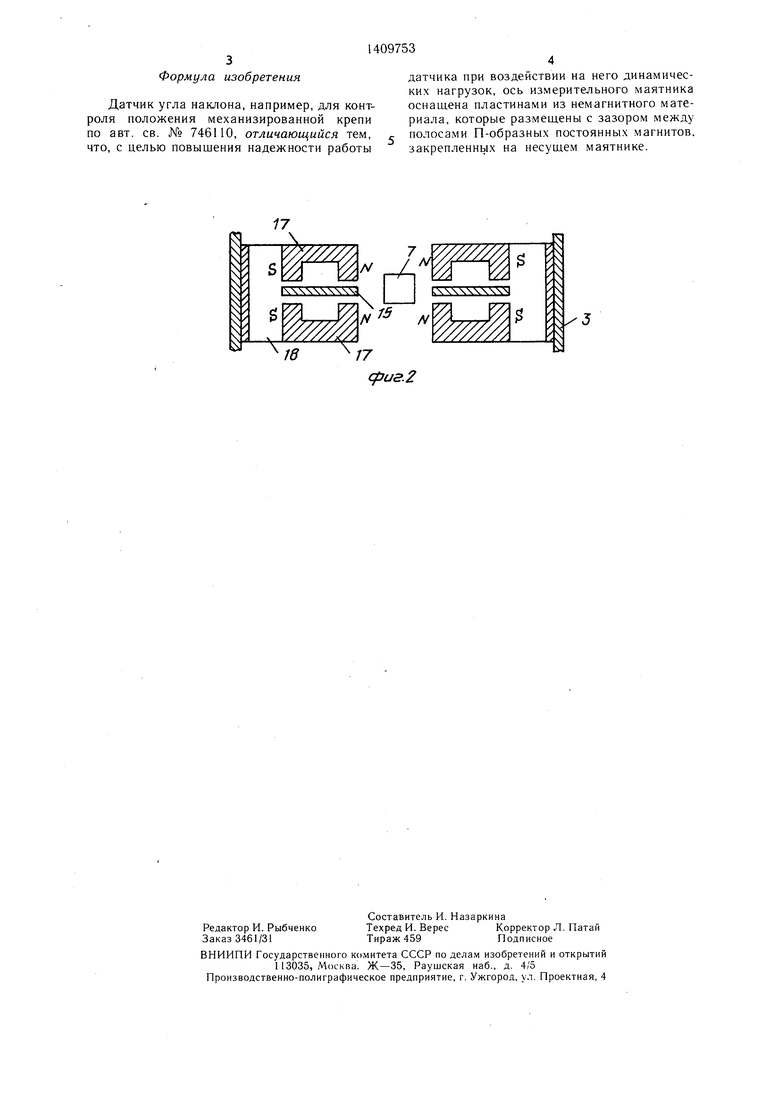
На фиг. 1 показана принципиальная схема датчика; на фиг. 2 - магнитоиндук- лионньш демпфер, разрез.
Датчик состоит из корпуса 1, в котором нарнирно укреплена ось 2 несуш,его маят- икa 3. Для задания направления объекту ю наклонной плоскости под углом к горизон10
Если положение объекта совпадает с заданным направлением движения или отклоняется на величину, определяемую наперед заданной разрешаюш.ей способностью устройства, то измерительный маятник с магнитом 7 находится в плоскости нулевого положения и магнитоуправляемые контакты 11 разомкнуты.
При отклонении объекта от заданного направления ось 2 несуш,его маятника 3 отклоняется от горизонтальной плоскости. На измерительный маятник с магнитом 7 действуют моменты веса и силы магнитного притяжения между магнитом 7 и фиксатором 8. Маятник с магнитом 7 находится в нулевом
ту на корпусе имеется шкала 4, а указатель л положении до тех пор, пока нормальная со- 5 является продолжением оси 2. На поверх-ставляюш,ая магнитной силы больше нормальной составляюшей веса. В противном случае маятник с магнитом 7 перемеш,ается до одного из упоров 10 и фиксируется в данном положении боковым фиксатором 9, дей- 20 ствие которого аналогично действию фиксатора 8. В боковом положении магнит 7 вызывает замыкание магнитоуправляемого контакта 11, включенного в исполнительную цепь автоматического контроля, содерж-а- щую блок 13 преобразователя сигналов блок 14 исполнительных механизмов, от- рабатываюших положение объекта до тех пор, пока ось 2 несуш,его маятника 3 не вер25
ости несушего маятника 3 по нормали к )си 2 закреплена ось 6 измерительного маят- 1ика с постоянным магнитом 7 в качестве руза. По радиусу движения магнита 7 в плоскости нулевого положения и в крайних положениях расположены фиксаторы 8 и 3 из магнитомягкого материала. Зазор меж- ау постоянным магнитом 7 и фиксатором 8 эегулируется путем перемещения последнего. Фиксаторы 9 снабжены антимагнитными регулируемыми упорами 10, ограничивающими силу магнитного взаимодействия измери- гельного маятника и фиксатора.
На поверхности измерительного маятника под упорами расположены магнитоуправляемые контакты 11 исполнительной це- ЗО ся в нулевом положении, пи системы автоматического контроля, например, положения механизированной крепи. Корпус датчика крепится, например, на крепи 12, где также расположен блок 13 преобразователя и блок 14 исполнительных механизмов.
I Кроме того, в конструкцию датчика введен магнитоиндукционный демпфер, кото- |рый состоит из пластин 15, выполненных из немагнитного материала (медь, латунь и т.п) :которые закреплены с помош,ью коромысла 16 на оси измерительного маятника и размешены между полюсами постоянных магнитов 17, закрепленных угольниками 18 на стенке несушего маятника 3. Размеры по- :Стоянных магнитов 17 и длина пластин 15
нется в горизонтальное положение и измерительный маятник с магнитом 7 не окажетРегулировка диапазона срабатывания устройства осуществляется путем перемеше- ния фиксатора 8 и упоров 10.
При резком развороте движушегося 35 объекта или при каком-либо силовом воздействии на датчик (динамическое воздействие, вибрация, начало движения объекта и т.д.) измерительный маятник с магнито.м 7 отклоняется от нулевого положения и совер- jQ шает свободные колебания (гармонические колебания), которые могут вызвать нежелательное замыкание магнитоуправляе.мых контактов 11 и включение в работу исполнительных механизмов. Возникновению таких свободных колебаний препятствует магвыбираются таким образом, чтобы при от- 45 нитоиндукционное устройство, прицип дей- клонении измерительного маятника во всемствия которого заключается в следующем,
диапазоне измеряемых углов пластины 15 неПри отклонении измерительного маятника с
магнитом 7 от нулевого положения пластины 15, перемешаясь совместно с маятником, пересекают магнитное поле, образованное постоянными магнитами 17. В этом случае, как известно, возникает сила, направленная против движения пластин. Эта сила пропорциональна скорости движения маятника, индукции в зазоре между магнита.ми и
зонтальную составляюшую к заданному на- 55 гасит свободные колебания, производя демп- правлению движения. При этом указатель 5фирующее действие и обеспечивая одностоустанавливают по щкале 4 против деления,роннее равномерное движение (отклонение)
соответствующего углу движения объекта.маятника.
вышли из магнитного поля постоянных магнитов 17.
Датчик работает следующим образом.
Корпус 1 датчика закрепляют на механизированной крепи или друго у1 движущимся объекте таким образом, чтобы ось 2 несушего маятника 3 представляла собой гори
Если положение объекта совпадает с заданным направлением движения или отклоняется на величину, определяемую наперед заданной разрешаюш.ей способностью устройства, то измерительный маятник с магнитом 7 находится в плоскости нулевого положения и магнитоуправляемые контакты 11 разомкнуты.
При отклонении объекта от заданного направления ось 2 несуш,его маятника 3 отклоняется от горизонтальной плоскости. На измерительный маятник с магнитом 7 действуют моменты веса и силы магнитного притяжения между магнитом 7 и фиксатором 8. Маятник с магнитом 7 находится в нулевом
положении до тех пор, пока нормальная со- ставляюш,ая магнитной силы больше нормальной составляюшей веса. В противном случае маятник с магнитом 7 перемеш,ается до одного из упоров 10 и фиксируется в данном положении боковым фиксатором 9, дей- ствие которого аналогично действию фиксатора 8. В боковом положении магнит 7 вызывает замыкание магнитоуправляемого контакта 11, включенного в исполнительную цепь автоматического контроля, содерж-а- щую блок 13 преобразователя сигналов блок 14 исполнительных механизмов, от- рабатываюших положение объекта до тех пор, пока ось 2 несуш,его маятника 3 не вер
ся в нулевом положении,
нется в горизонтальное положение и измерительный маятник с магнитом 7 не окажется в нулевом положении,
Регулировка диапазона срабатывания устройства осуществляется путем перемеше- ния фиксатора 8 и упоров 10.
При резком развороте движушегося объекта или при каком-либо силовом воздействии на датчик (динамическое воздействие, вибрация, начало движения объекта и т.д.) измерительный маятник с магнито.м 7 отклоняется от нулевого положения и совер- шает свободные колебания (гармонические колебания), которые могут вызвать нежелательное замыкание магнитоуправляе.мых контактов 11 и включение в работу исполнительных механизмов. Возникновению таких свободных колебаний препятствует магнитоиндукционное устройство, прицип дей- ствия которого заключается в следующем,
Формула изобретения
Датчик угла наклона, например, для контроля положения механизированной крепи по авт. св. № 746110, отличающийся тем, что, с целью повышения надежности работы
датчика при воздействии на него динамических нагрузок, ось измерительного маятника оснащена пластинами из немагнитного материала, которые размещены с зазором между полосами П-образны.х постоянных магнитов. закрепленнь1х на несущем маятнике.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла наклона,например,для контроля положения механизированной крепи | 1986 |
|
SU1416688A2 |
| Датчик угла наклона,например,для контроля положения механизированной крепи | 1977 |
|
SU746110A1 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА НАКЛОНА | 2000 |
|
RU2191988C2 |
| Переключатель с магнитоуправляемыми контактами | 1985 |
|
SU1261021A1 |
| ПАТЕНИЮ- ,,^, ^ rLXH'lHECKAS '^' ;БИБЛИОТЕКА | 1970 |
|
SU276452A1 |
| Датчик угла наклона | 1976 |
|
SU682761A1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ КОНТЕЙНЕРА НА ВИЛОЧНОМ ЗАХВАТЕ | 2010 |
|
RU2457172C1 |
| ПРИБОР ДЛЯ ИЗУЧЕНИЯ ЗАКОНОВ МЕХАНИКИ | 2011 |
|
RU2473974C1 |
| Устройство для определения угла наклона подвижного объекта | 1978 |
|
SU718704A1 |
| ДАТЧИК УСКОРЕНИЯ | 1992 |
|
RU2020632C1 |
Изобретение относится к горнорудной про.м-сти и м.б. использовано при разработке крутых и крутонаклонных угольных пластов механизированными комплексами. Цель - повышение надежности работы датчика при воздействии на него динамических нагрузок. Для этого закрепленная в корпусе 1 ось 2 измерительного маятника с постоян- ны.1 .магнитом (ПМ) в качестве груза осна- .щена пластинами 15 из немагнитного материала. Пластины 15 размещены с зазором между полюсами П-образных закрепленных на несуш.ем маятнике 3 ПМ 17. При отклонении объекта от заданного направления ось 2 несущего маятника 3 отклоняется от горизонтальной плоскости. В боковом положении ПМ 7 вызывает замыкание магнито- управляе.мого контакта 11 исполнительной цепи системы автоматического контроля. Пластины 15, перемещаясь совместно с измерительным маятником, пересекают магнитное поле, образованное ПМ 17. Возникает сила, направленная против движения пластин 15, которая гасит свободные колебания, производя демпфирующее действие. Л1аятник соверщает одностороннее равно- .мерное движение (отклонение). 2 ил. о сл
cfJue.Z
| Датчик угла наклона,например,для контроля положения механизированной крепи | 1977 |
|
SU746110A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
