Oi Oi
00
ex
NJ
Z2
Изобретение относится к горнорудной промышленности и может быть, в частности, использовано при разработке крутых и крутонаклонных угольных пластов механизированными комплексами и агрегатами.
Целью изобретения является повышение точности измерений и повышение надежности работы датчика.
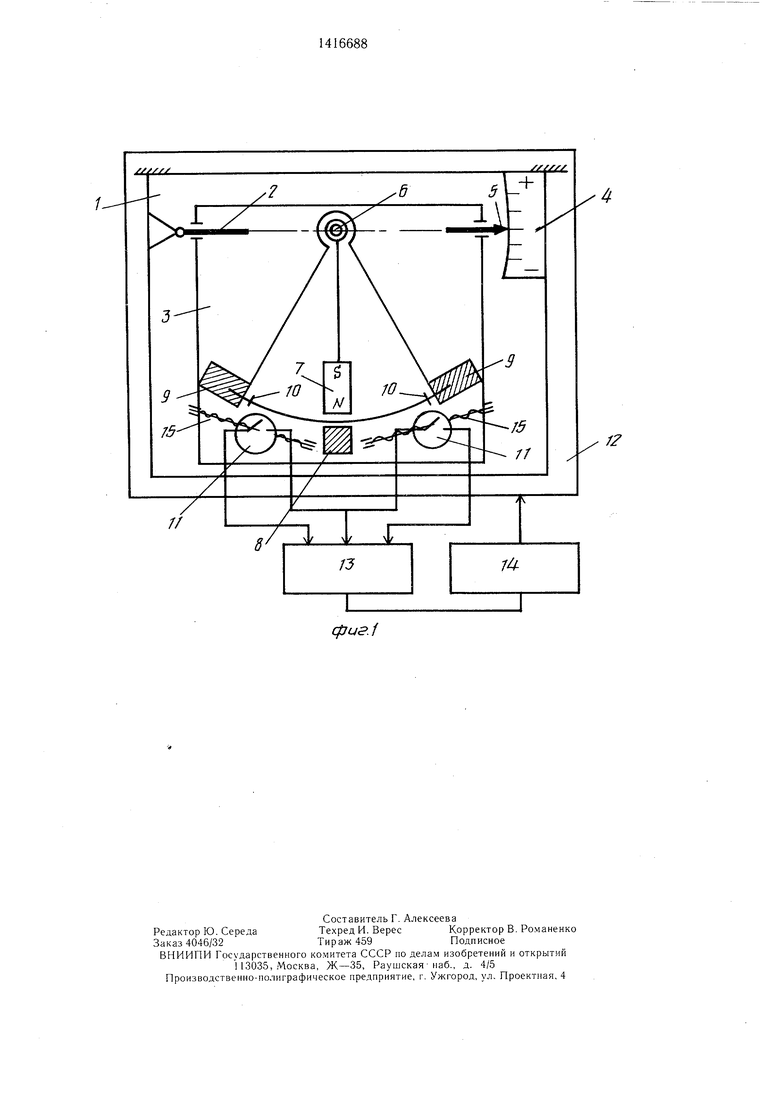
На фиг. изображена конструктивная схема предлагаемого датчика; на фиг. 2 - конструкция блока, обеспечивающего подвижность магнитоуправляемых контактов.
Датчик (фиг. 1) состоит из корпуса 1, в котором шарнирно закреплена ось 2 несущего маятника 3. Для задания направления объекту по наклонной плоскости под углом к горизонту на корпусе имеется шкала 4, а указатель 5 является продолжением оси 2. На поверхности несу- ш,его маятника 3 на нормали к оси 2 подвеса закреплена ось 6 измерительного маятника с постоянным магнитом 7 в качестве груза. По радиусу движения магнита 7 в плоскости нулевого положения и в крайних положениях расположены фиксаторы 8 и 9 из магнитомягкого материала. Зазор между постоянным магнитом 7 и фиксатором 8 регулируется путем перемещения последнего. Фиксаторы 9 снабжены антимагнитными регулируемыми упорами 10, ограничивающими величину силы магнитного взаимодействия измерительного маятника и фиксатора. На поверхности несущего маятника под упорами расположены магнито- управляемые контакты 11 исполнительной цепи системы автоматического контроля, например, положения механизированной крепи. Корпус датчика крепится, например, на крепи 12, гд также расположен блок 13 преобразователя и блок 14 исполнительных механизмов.
Магнитоуправляемые контакты 11 установлены в корпусе датчика подвижно с помощью узла 15, ось которого расположена в пространстве перпендикулярно оси 6 измерительного маятника. Узел 15, обеспечивающий подвижность магнитоуправляемых контактов состоит (фиг. 2) из перемещающегося по направляющим 16 ползуна 17, в котором размещены магнито- управляемые контакты 11. Ползун 17 сферическим соединением 18 связан с микрометрическим винтом 19 и гайкой 20. Гайка 20 подвижно соединена с направляющей 16 разрезным кольцом 21. На верхней образующей гайки 20 нанесены угловые деления. Провода 22 магнитоуправляемого контакта выведены из направляющей через прорези 23 направляюидей.
Датчик работает следующим образом.
Корпус 1 датчика закрепляется на механизированной крепи или другом движущемся объекте 12 таким образом, чтобы ось 2 несущего маятника 3 представляла собой горизонтальную составляющую к за0
5
0
5
0
5
0
5
0
5
данному направлению движения. При этом указатель 5 установится по шкале 4 против деления, соответствующего угла движения объекта.
Если положение объекта совпадает с заданным направлением движения или отклоняется на величину, определяемую наперед заданной разрешающей способностью устройства, то постоянный магнит 7 измерительного маятника находится в плоскости нулевого положения и магнито- управляемые контакты разомкнуты.
Настройка датчика на определенную разрешающую способность и определение минимального уровня чувствительности осуществляется следующи.м образом.
Если направление движения объекта должно быть строго задано, то магнито- управляемые контакты 11 перемещают Микрометрическим винтом в сторону магнита 7 до момента их замыкания. Берется по шкале на гайках 20 угловой отсчет. Затем, враплая гайки 20 в обратном направлении, начинают постепенно перемещать магни- тоуправляемые контакты 11 в магнитном поле постоянного магнита 7 в противоположном направлении. При размыкании контактов берется угловой отсчет по шкалам на гайках 20. Разность полученных угловых отсчетов и определит минимальный уровень чувствительности датчика. Затем отклоняют измерительный маятник с магнитом 7 в одну из сторон до замыкания магнитоуправляемых контактов 11 и перемещают упор 10 фиксатора 9 до контакта с маятником. Ту же самую операцию повторяют и с другим магнитоуправляе- мым контактом. Маятник возвращают в нейтральное положение. Датчик готов к работе. При отклонении объекта от заданного на- правления ось 2 несущего маятника 3 отклоняется от вертикальной плоскости. На измерительный маятник будут действовать моменты силы веса и силы магнитного притяжения между магнитом 7 и фиксатором 8. Маятник будет находиться в нулевом положении до тех пор, пока нормальная составляющая магнитной силы будет больше нормальной составляющей силы веса. В противном случае маятник переместится до одного из упоров 10 и будет зафиксирован в данном положении боковым фиксатором 9, действие которого аналогично действию фиксатора 8. Магнит 7 вызовет замыкание магнитоуправляемого контакта 11, включенного в исполнительную .цепь автоматического контроля, содержащую преобразователь 13 сигналов и исполнительные механизмы 14, отрабатывающие положение объекта до тех пор, пока не разомкнутся магнитоуправляемые контакты 11. Контакты разомкнутся не при том же положении измерительного маятника, при котором замкнулись, так как имеется погрешность, которая определена минимальным
уровнем чувствительности. Таким образом, объект будет двигаться не в строго определенном направлении, а с погрешностью, которая ранее определена и может быть практически нейтрализована отклонением объекта в обратную сторону на величину погрешности измерения угла.
Если направление движения не строго задано, а допускаются определенные угловые отклонения в ту или иную сторону, то настройка датчика осуществляется следующим образом. Ось 2 несущего маятника отклоняют на допустимый угол отклонения движения объекта в сторону, например, ( + ) по щ кале 4. Естественно отклонится и измерительный маятник от нейтрального положения. Магнитоуправляемый контакт 11 перемещают в сторону измерительного маятника до замыкания контактов и выдвигают упор 10 фиксаторов 9 до контакта с магнитом 7. Ту же самую операцию повторяют в сторону (-). Выводят измерительный маятник в нулевое положение. Датчик готов к работе.
Выдвижение упоров 10 фиксаторов 9 необходимо также для того, чтобы магнит 7 не проскакивал момента замыкания контактов 11 при значительных отклонениях от заданного направления. При проскакива- нии магнитоуправляемые контакты, будучи замкнутыми и находящимися в магнитном поле магнита 7, могут выйти из этого поля и разомкнуться. В этом случае объект будет двигаться с большим отклонением, а система автоматического контроля не успеет отработать нормальное положение объекта.
Таким образом, возможность перемещения магнитоуправляемых контактов дает возможность, с одной стороны, оценить чувствительность датчика в процессе эксплуатации, контролировать и оперативно выявлять погрешность работы датчика с дальнейшей корректировкой направления движения объекта. Это позволит с высокой точностью контролировать кинематические параметры
Q механизированных крепей, в частности угол установки и передвижения базовых секций в плоскости пласта относительно линии горизонта. С другой стороны такое выполнение контактов позволит обеспечить надежную работу датчика при установке его
5 на объекты с pa3viH4HbiMH допустимыми угловыми отклонениями от заданного направления.
Формула изобретения
Q Датчик угла наклона, например, для контроля положения механизированной крепи по авт. св. № 746110, отличающийся тем, что, с целью повышения точности измерений и повышения надежности работы датчика, он снабжен направляющей с про5 резями, ползуном, размещенным в направляющей с возможностью перемещения, микрометрическим винтом и гайкой с делениями, причем магнитоуправляемые контакты установлены в ползуне, а гайка с делениями подвижно соединена с направляющей, в которой размещен микрометрический винт, с одной стороны соединенный с ползуном, а с другой - с гайкой, при этом ось направляющей в пространстве перпендикулярна оси измерительного маятника.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла наклона,например,для контроля положения механизированной крепи | 1977 |
|
SU746110A1 |
| Датчик угла наклона,например,для контроля положения механизированной крепи | 1986 |
|
SU1409753A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ ВЕРТИКАЛИ | 2012 |
|
RU2494344C1 |
| Механизм настройки регулируемого контакта | 1979 |
|
SU881715A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОБЪЕКТОВ ГЛАЗНОГО ДНА | 1997 |
|
RU2137415C1 |
| ОТРАЖАТЕЛЬНЫЙ УГЛОМЕРНЫЙ ИНСТРУМЕНТ | 2001 |
|
RU2190188C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАБОТЫ ЦАРАПАНИЯ АБРАЗИВНЫМ ИНСТРУМЕНТОМ ПОВЕРХНОСТИ ИСПЫТУЕМОГО ОБРАЗЦА | 2006 |
|
RU2305826C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ | 1998 |
|
RU2147737C1 |
| Путевая машина | 1982 |
|
SU1082891A1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МАШИНА ТРЕНИЯ (ВАРИАНТЫ) | 2015 |
|
RU2624992C2 |
Изобретение относится к горнорудной пром-сти и м. б. использовано при разработке крутых и крутонаклонных угольных пластов. Цель - повышение точности измерений и повышение надежности работы датчика. Для этого он снабжен направляющей (Н) с прорезями 23, ползуном 17, размеш,енным в Н 16 с возможностью перемещения, микрометрическим винтом 19 и гайкой 20 с делениями. В ползуне установлены магнитоуправляемые контакты (МУК) 11. Винт 19 размещен в Н 16. С одной стороны винт 19 соединен с ползуном 17, а с другой - с гайкой 20, которая подвижно соединена с Н 16. Ось Н 16 в пространстве перпендикулярна оси измерительного маятника с постоянным магнитом (ПМ), ось которого закреплена на поверхности несущего маятника 3 по нормали к оси подвеса. Для движения объекта в строго заданном направлении датчик настраивают на минимальный уровень чувствительности. Для этого винтом 19 перемещают МУК 11 в сторону ПМ до момента их замыкания. По шкале на гайке 20 берется угловой отсчет. Вращая гайку 20 в обратном направлении, постепенно перемещают МУК 11 в магнитном поле ПМ в противоположном направлении. При размыкании МУК 11 берется угловой отсчет по шкале на гайке 20. Разность полученных угловых отсчетов определит минимальный уровень чувствительности датчика. 2 ил. (С (Л
фиг.1
| Датчик угла наклона,например,для контроля положения механизированной крепи | 1977 |
|
SU746110A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
