(54) ДАТЧИК УГЛА НАКЛОНА, НАПРИМЕР, ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла наклона,например,для контроля положения механизированной крепи | 1986 |
|
SU1416688A2 |
| Датчик угла наклона,например,для контроля положения механизированной крепи | 1986 |
|
SU1409753A2 |
| Датчик угла наклона | 1976 |
|
SU682761A1 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА НАКЛОНА | 2000 |
|
RU2191988C2 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ КОНТЕЙНЕРА НА ВИЛОЧНОМ ЗАХВАТЕ | 2010 |
|
RU2457172C1 |
| КОМПЛЕКТ ДЛЯ ДЕМОНСТРАЦИИ ЗАКОНОВ МЕХАНИКИ (ВАРИАНТЫ), МАГНИТНЫЙ ГЕРКОНОВЫЙ ДАТЧИК И ПРИСПОСОБЛЕНИЕ ДЛЯ ОПРЕДЕЛЕНИЯ МГНОВЕННОЙ СКОРОСТИ ТЕЛА, БРОШЕННОГО ГОРИЗОНТАЛЬНО | 2011 |
|
RU2460146C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2455616C1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| Датчик угла наклона | 1976 |
|
SU605084A1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
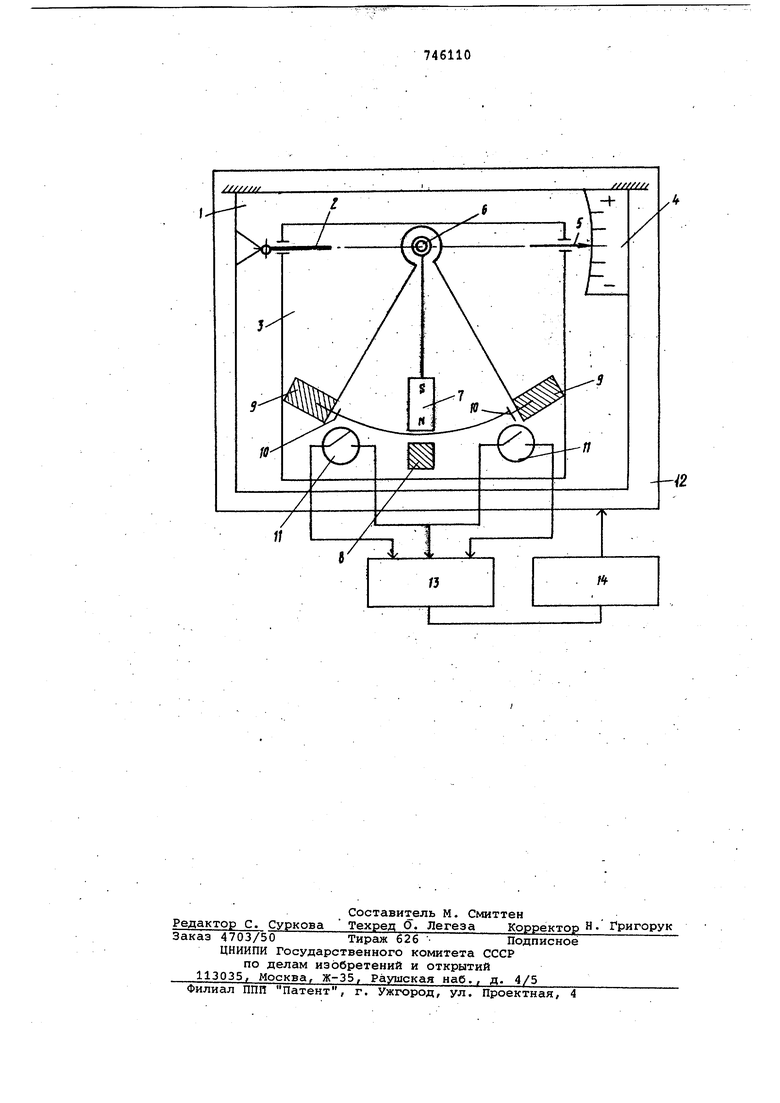
Изобретение относится к устрвйс вам измерения угла наклона и может быть использовано для автоматического задания и контроля направления дви жения механизированной крепи в очистных выработках крутых и наклонно за. пегающих пластов,а ,также для управле ния движением других объектов, работающих на наклонной плоскости. Известен датчик угла наклона, например двухкоординатный наклономер, содержащий измерительный маятник, постоянные магниты и магнитоуправляемые контакты l. Недостатком этого датчика является ниакая стабильность и точность измерения из-за их зависимостей от изменений угловых положений объекта. Известен датчик угла наклона, содержащий измерительный маятник, фиксаторы и контакты в крайних положениях измерительного маятника 2}. Недостатками такого датчика являют ся зависимость точности измерения от изменения наклона датчика в плоскости перпендикулярной плоскости измерения наличие гидравлического демпфера снижает точность стабилизации маятника .датчика в нулевом по ложении. Все это снижает надежность датчика в работе особенно в схемах контроля положения, например положения механизированных крепей. Цель изобретения - повышение надежности датчика в работе. Это достигается тем, что датчик снабжен фиксатором нулевого положения, регулируемыми упорами и несущим маятником, на котором шарнирно закреплен измерительный маятник, груз которого выполнен в виде постоян14ого магнита, в крайних положениях взаимодействующего с регулируемыми упорами, закрепленными на фиксатЬрах, причем оси подвеса несущего и измерительного маятников взаимно перпендикулярны, а контакты выполнены магнитоуправляемыми. На чертеже изображена конструктивная схема предлагаемого датчика. Датчик состоит из корпуса 1, в котором шарнирно укреплена ось 2 несущего маятника 3. Для задания направления объекту по наклонной плоскости под углом к горизонту на корпусе имеется шкала 4, а указатель 5 является продолжением оси 2. На поверхности несущего маятника 3 по нормали к оси
подвеса 2 закреплена ось б измеритель ного маятника с постоянным магнитом 7 й Кйчествё груза. По радиусу движения магнита 7 в плоскости нулевого положения и в крайних положениях расположены фиксаторы 8 и 9 из магнитомягкого материала. Зазор между постойнным магнитом 7 и фиксатором 8 регу- лируется путем перемещения последнего Фиксаторы 9 снабжены антимагнитными регулируемыми упорами 10, ограничивающими величину силы магнитного вэаимо действия измерительного маятника и фисатора.
На поверхности несущего маятника под упорами расположены магнитоуправляемые контакты 11 исполнительной цепи си,стемы автоматического контроля, например, положения механизированной крепи. Корпус датчика крепится, например, на крепи 12, где также расположен блок 13 преобразователя и блок исполнительных механизмов 14.
Работа датчика осуществляется сле дующим образом. Корпус 1 датчика закрепляется на механизированной крепи или другом движущемся объекте 12 таким образом, чтобы ось 2 несущего маятника 3 представляла собой горизонтальную составляющую к заданному направлению движения. При этом указатель 5 установится по шкале 4 против деления соответствующего угла движения объекта. ,
Если положение объекта совпадает с заданным направлением движения или отклоняется на величину, определяемую наперед заданной разрешающей способностью устройства, то измерительный маятник 7 находится в плоскости нулевого положения и магнитоуправляемые контакты 11 разомкнуты.
При отклонении объекта от заданного направления ось 2 несущего маятника 3 отклонится в вертикальной плоскости. На измерительный маятник 7 действовать моменты силы Веса И силы магнитного притяжения между .магнитом .7 и фиксатором 8. Маятник 7 будет находиться в нулевом Положении до тех пор, пока нормальная сос.тавляющая магнитной силы будет больше нормальной составляющей силы веса. В это случае маятник 7 переместится до одного из упоров 10 и будет зафиксирован в данном положении боковым фиксатором 9, действие которого аналогично действию фиксатора 8. В боковом положении магнит 7 вызовет замыкание магнито правляемого контакта 11 включенного в исполнительную цепь автоматического контроля, содержащую преобразователь сигналов 13 и исполнительньге механизмы 14, отрабатывающие положение объекта до тех пор, пока ось 2 несущего маятника 3 не вернеТся в горизонтальное положение и измерительный маятник 7 окажется.в нулевом положении.
. Регулировка диапазона срабатывания устройства осуществляется путем перемещения фиксатора 8 и упоров 10 фиксаторов 9.
Применение устройства позволяет значительно упростить процесс передвижки крепи, автоматизировать задание и повысить точность контроля направления движения крепи.
Формула изобретения
Источники информации, принятые вовнимание при экспертизе
