
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1986 |
|
SU1471260A1 |
| Шаговый двигатель | 2016 |
|
RU2659798C1 |
| Шаговый электродвигатель | 1982 |
|
SU1023566A1 |
| Многополюсный переключатель бокового каротажного электрозонда | 1947 |
|
SU85200A1 |
| ТРАНСЛЯЦИОННАЯ ТЕЛЕГРАФНАЯ УСТАНОВКА | 1926 |
|
SU6810A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2077108C1 |
| Устройство для наладки датчиков контроля роторных автоматов | 1976 |
|
SU643741A1 |
| Устройство для приведения по шаговой системе в круговое и радиальное движение искателя | 1929 |
|
SU27636A1 |
| Линейный шаговый электродвигатель | 1979 |
|
SU989698A1 |
| Электромагнитный шаговый двигатель | 1981 |
|
SU987754A1 |
Изобретение относится к электротехнике и м.б. использовано в автоматизированном электроприводе. Цель состоит в упрощении конструкции.Электродвигатель содержит установленное на валу 1 храповое колесо 2, электромагнит 4, выполненный дугообразным с намотанной на нем обмоткой 6. Она покрыта изоляционным материалом, на котором со стороны храпового колеса 2 выполнены зубья пилообразной формы. При подаче на обмотку 6 импульсов тока возникает магнитный поток, который замыкается по гибкому дугообразному электромагниту 4, магнитопро- воду 3, установленному на корпусе 9 электродвигателя, н винту 5. Тяговое усилие, возникающее при этом, притягивает к винту 5 или магнитопрово- ду 3 наконечник 7, отчего дуга гибкого магнитопровода сужается, охвйты- вает храповое колесо 2, поворачивая его на шаг. 4 з.п. ф-лы, 8 ил. с SS
cffue.i
Изобретение относится к электро- т|ехнике и может быть использовано в фтоматизиро анном электроприводе. .Целью изобретения является упро- конструкции, обеспечение регу- л|ировки величины шага и частоты вра1ФНИЯ .
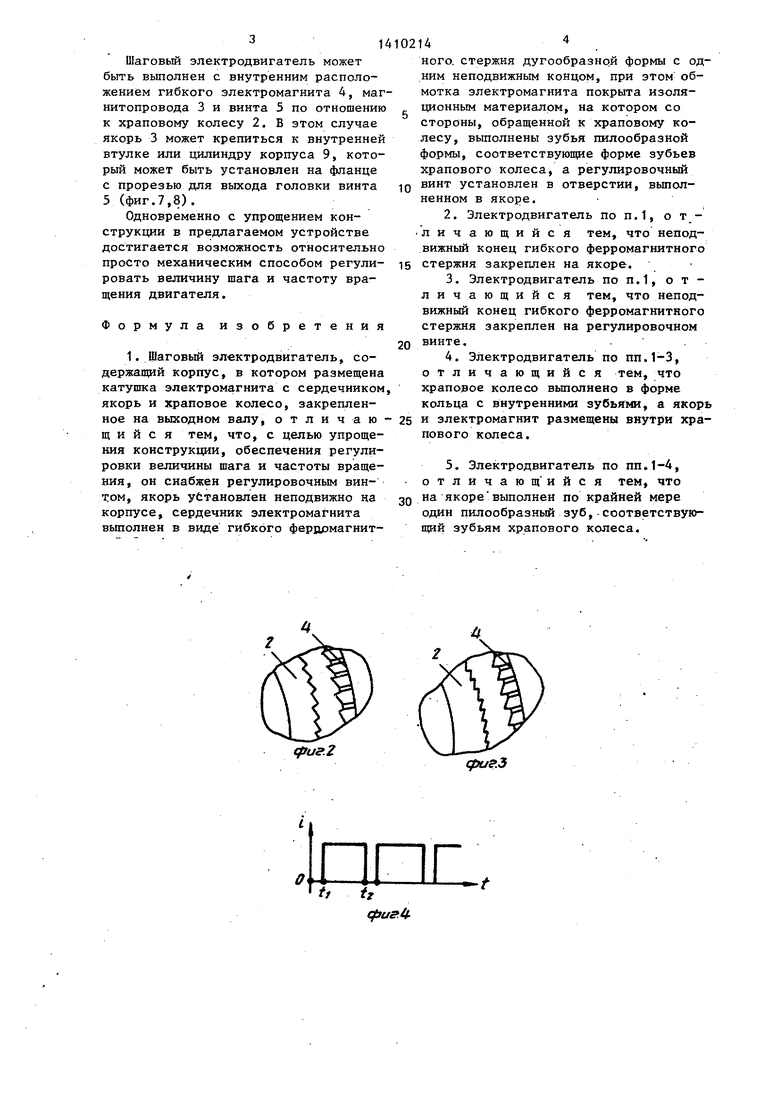
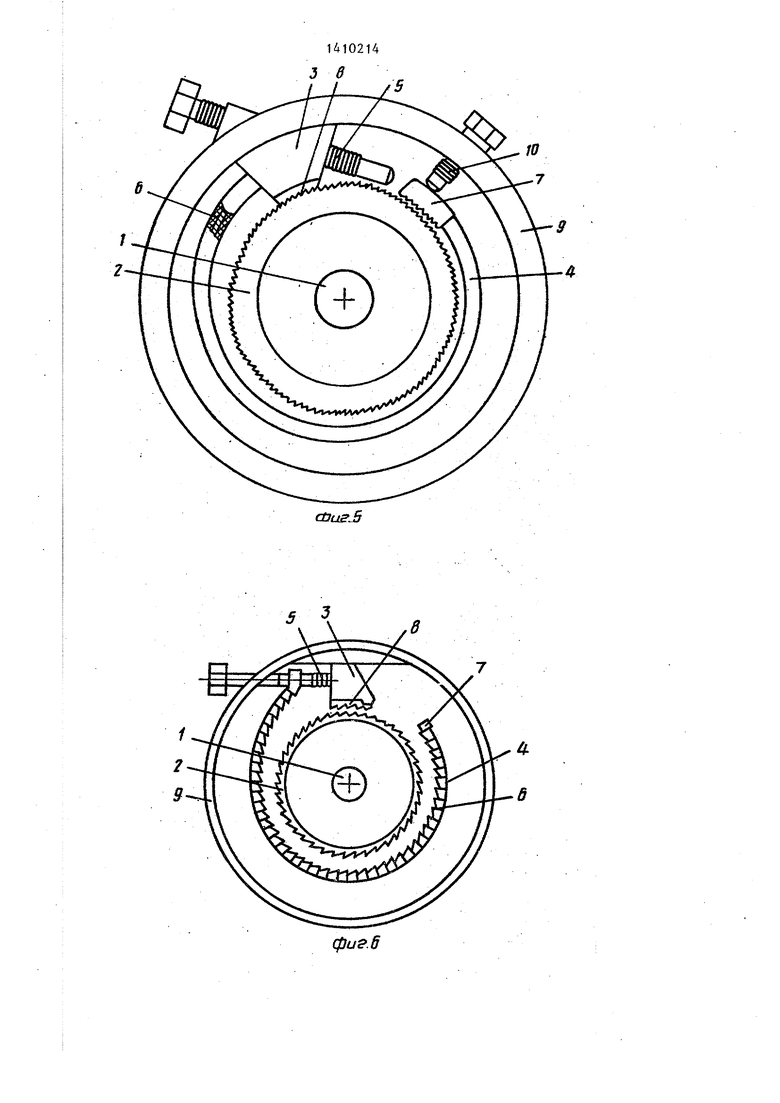
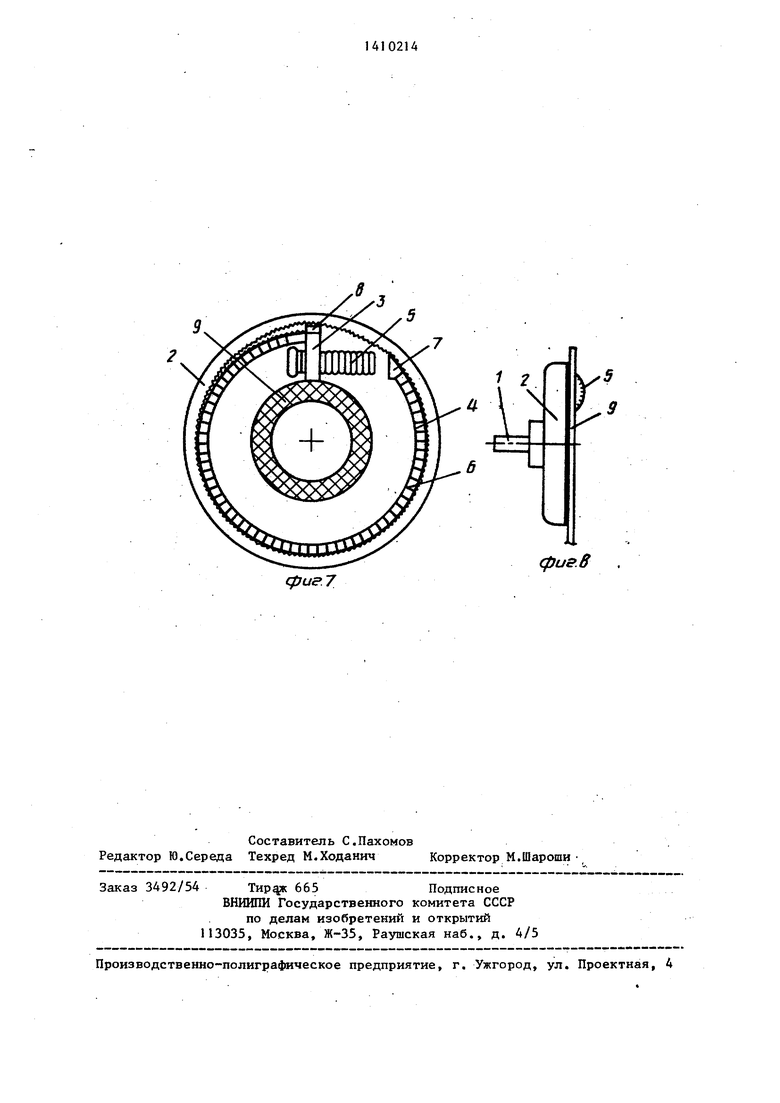
j На Фиг. 1 схематически представлен шаговый электродвигатель с гибким элементом, имеющим зубчатость по всей внутренней поверхности, поперечный разрез; на фиг. 2-3 - фрагмент зубчатьк поверхностей храпового колеса и гибкого элемента; на фиг.4- циклограмма импульсов,- питающих двигатель; на фиг. 5 - шаговый электродвигатель, имеющий зубчатость на ограниченном внутреннем участке торцо- вэй части гибкого элемента, попереч- н;)1й разрез; на фиг. 6 - схема двига- Т2ЛЯ, у которого неподвижный конец г:сбкого элемента прикреплен к регу- . Л ровочному винту, поперечный разрез; н,1 фиг. 7 - схема двигателя с внешним :пр отношению к гибкому элементу рас- ,положением храпового колеса, попереч- 1н,1й разрез; на фиг. 8 - схема-элек- тоодвигателя с наружным расположением x-janoBoro колеса по отношению к гибкому элементу.
Шаговый электродвигатель (фиг.1-8) содержит установленное на валу 1 храповое колесо 2, магнитопровод 3, дугообразный гибкий электромагнит 4 и вннт 5. Электромагнит 4 выполнен гибким дугообразным. Он содержит обмотку 6, которая намотана на гибкий фер- ромагнитный стержень, имеющий дуго- о|бразную форму (фиг.5). Обмотка 6 прокрыта изоляционным материалом, на KJoTopoM со стороны, обращенной к хра- првому колесу 2, выполнены зубья пи- лЬобразной формы. Зубья пилообразной ,фЬрмы можно выполнять как в одну стор|эну (фиг.2), так и в другую (фиг.З). В;Ь:нт 5 может быть выполнен из ферромагнетика. Зубья могут быть выполне- не на всей поверхности дугообраз- н|эго электромагнита .4, обращенной к х; заповому колесу 2, а лишь на его чЬсти, напрршер на гладкий дугообраз- нШ электромагнит может быть надет н|1конечншс 7 с зубьями со стороны xjanoBoro колеса 2 (фиг.З). На магни- т проводе 3 для предотвращения пово- Р0та храпового колеса 2 во время паузи выполнена накладка 8 с упругими П1 шообразными зубьями. Магнитопро
Q
5
0
5
0
0
вод 3 установлен на корпусе 9 электродвигателя.
При работе электродвигателя на его обмотку 6 подаются импульсы тока i (фиг.4). При подаче каждого импульса (например, в момент времени t, фиг.4) в катушке 6 возникает магнитный поток, который замьтается по цепи: гибкий дугообразный электромагнит 4, магнитопровод 3 и винт 5. Магнитный поток вызывает в воздушном промежутке между винтом 5 и наконечником 7 (фиг.1,5 и 7) или магнитопро- водом 3 и наконечником 7 (фиг.6) тяговое усилие, под действием которого наконечник 7 притягивается к винту 5 или магнитопроводу 3. При этом дуга гибкого магнитопровода 4 сужается и он охватывает храповое колесо 2 (фиг.1,5 и 6), зубья которого входят в зацепление с зубьями гибкого магнитопровода 4. Храповое колесо 2 поворачивается и таким образом совершает шаг.
После окончания управляющего импульса в момент времени t, (фиг.4) катушка 6 обесточивается, упругая дуга электромагнита 4 увеличивает свой радиус кривизны, отходит своим наконечником 7 от винта 5 или магни- топровода 3 и возвращается в исходное состояние (фиг.1,5 и 6). При подаче следующего импульса рабочий цикл повторяется. С отходом наконечника 7 обратного поворота колеса 2 не происходит из-за пилообразности его зубьев и наличия предохранительных зубьев на накладке 8.
Если зубья в электродвигателе выполнять с обратной пилообразностью (фиг.З), то при каждом шаге поворот колеса будет совершаться при обесто- чивании катушки 6, т.е. в момент времени tj (фиг.4) .
Ввинчивая или вывинчивая винт 5, можно регулировать ход гибкого- электромагнита 4 и таким образом управлять величиной шага и частотой вращения колеса 2.
Зубья могут быть выполнены как по всей дуге электромагнита 4 (фиг.1,6), так и лишь на жестком наконечнике 7 (фиг.5). Положение наконечника 7 можно .регулировать винтом 10 (фиг.З).
Конец гибкого электромагнита 4 может быть вьшолнен присоединенным как к магнитопроводу 3 (фиг.1,3), так и винту 5 (фиг.6).
3,
Шаговый электродвигатель может быть выполнен с внутренним расположением гибкого электромагнита 4, маг нитопровода 3 и винта 5 по отношению к храповому колесу 2. В этом случае якорь 3 может крепиться к внутренней втулке или цилиндру корпуса 9, который может быть установлен на фланце с прорезью для выхода головки винта 5 (фиг.7,8).
Одновременно с упрощением конструкции в предлагаемом устройстве достигается возможность относительно просто механическим способом регулировать величину шага и частоту вращения двигателя.
Формула изобретения
4
ного. стержня дугообразной формы с одним неподвижным концом, при этом обмотка электромагнита покрыта изоляционным материалом, на котором со стороны, обращенной к храповому колесу, вьшолнены зубья пилообразной формы, соответствующие форме зубьев храпового колеса, а регулировочный
винт установлен в отверстии, выполненном в якоре.
стержня закреплен на якоре.
винте.. .
и электромагнит размещены SHytpH храпового колеса.
на якоре выполнен по крайней мере один пилообразный зуб,- соответствующий зубьям храпового колеса.
CfXJS .S
фигЛ
ctJasJ5
5
фие.6
фиг 7
| Ивоботенко В.А., Рубцов В.П., Садовский Л.А., Цаценкин В.К., Чили- кин М.Г | |||
| Дискретный электропривод с шаговыми двигателями | |||
| М.: Энергия, 1971, с.8, РИС..1-2. |
