реп лепном на валу ротора и двд электромагнита, обмотки которыхj жестко закрепленные на станине ротора, пояключе ны к генератору импу;1ьсов, а якори связаны с cooTBeTCTByKsuHNrer храповыми механизмами.
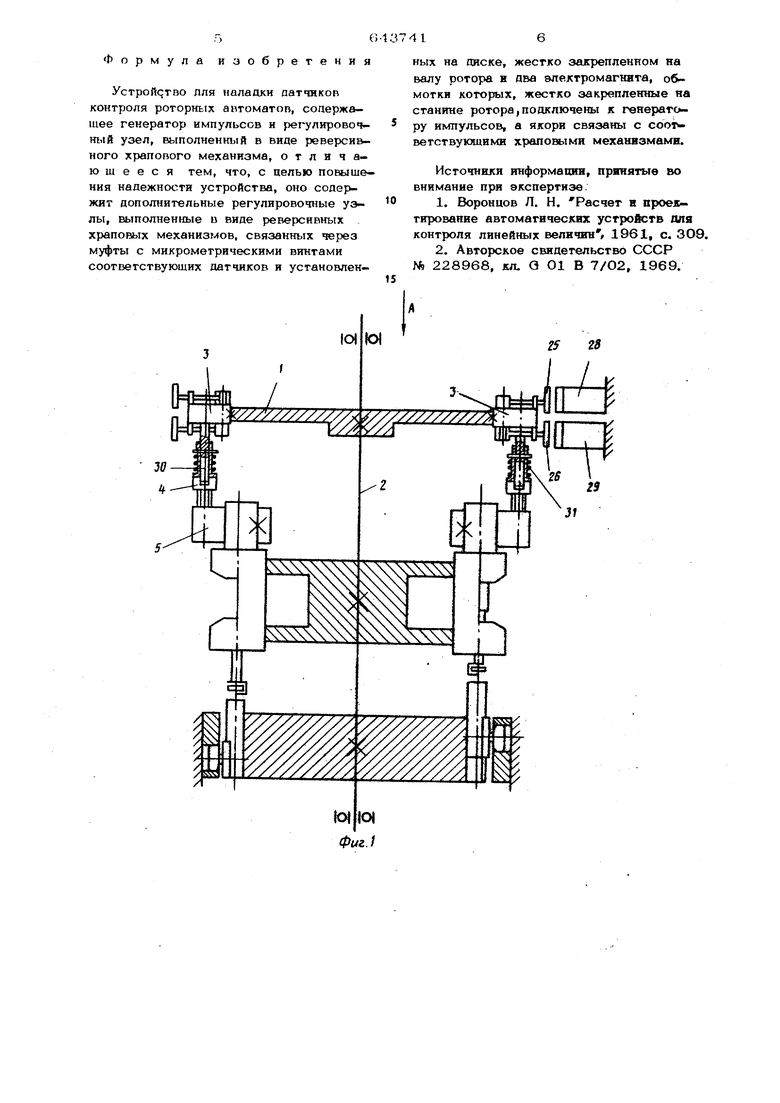
На фиг. 1 приведена схема устройства, план; на фиг. 2 - вид Л фиг. 1; на фиг. 3 - разрез Б-Б фиг. 2; на фиг. 4 разрез ,В-В фиг. 3.
Устройство для наладки датчиков контроля автоматов содержит диск 1, жестко установленный на валу ротора 2, регулировочтгые узлы 3 (один из которых основной, остальные - дополнитеяЫште), закреплешгые над микромет- ричесхими В гатами 4, датчики 5.
Регулировочный узел 3 состоит из корпуса 6, в котором установлены с возможностью поворота валы 7 и 8 храповых механизмов 9 и 10, жестко закреплетгных на валу 7, качающегося коромысла 11 с выступами 12, жестко соединенного с валом 8 и несущего шартшрно установленные собачки 13 и 14, фиксатора 15 и тормоза 16. Выступы 12 служат для ограничения поворота собачек 13 и 14.
Собачки 13 и 14 подпружинены относительно выступов 12 пружинами 17. Угол качания коромысла 11 ограничивается упорами 18 и 19.
На концах вала 8 жестко закреплены кривошгшы 2О и 21 шарнирио соединенные соответственно с тягами 22 и 23, подпружшгениыми относительно корпуса Б пружинами 24. К свободным концам тяг 22 к 23 жестко прикреплены якоря 25 и 26, установленные на разных уровнях по вертикали.
На станине 27 ротора неподвижно установлены обмотки электромагнитов 28 ц 29, подключенные к генератору импульсов (на чертеже не показан), причем электромагнит 29, установлен на одном уровне с якорем 25, электромагнит 29 -. с якорем 26. Кроме того, башмаки электромагнитов 28 и 29 имеют форму дуги, угол которой не превышает угла 3Otibi подналадки датчиков.
Электромагнит 28 предназначен для привода регулировочного узла 3 через якори 25 при наладке датчиков 5 на верхний предел измерения, а электромагнит 29 - через якори 26 при наладке датчиков 5 на нижний предел измерения
Е.1хопной aл 7 каждого укэгулиро- почного узла 3 наладки связан с микрометрическими винтами 4 датчиков 5 через муфту 30, подпружиненную в осевом направлении относительно винта 4 пружиной .31.
Устройство работает следующим образом.
При подходе блока контроля с установленной в нем образцовой деталью (эталоном), выполненной по одному из предельных размеров, в зону наладки запитывается один из электромагнитов, управляемый генератором импульсов (например, мультивибратором с частотой 10.:. 15 Гп).
После подачи импульса, например на электромагнит 29, поп действием электромагнитшях сил притянется якорь 26, который посредством тяги 23 повернет кривошип 21, а с ним и коромвюло 11 по направлению часовой стрелки на угол, установле шый упором 19. При этом собачка 13 толкает храповой механизм 9 в том же направлении, а со- бачка 14 выводится из зацепления с . храповым механизмом 10 выступом 12 выполненным на коромысле 11.
После прекращения подачи импульса :Тяга 23 под действием пружины 24 возвратит коромысло в исходное положение устанавливаемое фиксатором 15. При этом собачка 13 соскальзывает на следующий зуб механизма 9, а собачка 14 входит в зацепление со следующим зубо механизма 9. Для того чтобы собачка 13 при обратном своем ходе не повернула бы храповой механизм, он снббжен тормозом 16.
При повторной подаче импульса на катушку электромагнита 29 цикл работы устройства повторяется.
При этом выходной вал 7 регулировочного узла 3 сообщает шаговое вращение микрометрическому винту 4 датчика 5 и поднастраивает последний.
Окончание наладки определяется замыканием контактов датчика 5, что Ыз1зывает прекращение подачм управляющих импульсов на электромагнит 29.
При наладке другого крайнего предельного размера питание получает электромагнит 28, который,притягивая якорь 25 через тягу 22 и кривошип 21; сообщает вращение выходному валу 7 регулировочного. узла 3 в. противоположную сторону. Формула изобретения Устройство пля наладки датчиков контроля роторных автоматов, содержащее генератор импульсов и 1:)егулировочHiiift узел, выполненный в виде реверсивного jcpanoRoro механизма, отличающееся тем, что, с целью повышения надежности устройства, оно содержит дополнительные регулировочные узлы, выполненные п виде реверсивных храповых механизмов, связанных через муфты с микрометрическими винтами соответствующих датчиков и установленMtoi
Фиг.} 16 ных на диске, жестко закрепленном на валу ротора и два электромагнита, обмотки которых, жестко закрепленные на станине ротора,подключены к генератору импульсов, а якори связаны с соответствуюшими храповыми механизмами. Источники информашш, принятые во внимание при экспертизе. 1. Воронцов Л. Н. Расчет и проедтирование автомагических устройств для контроля линейных величин , 1961, с. ЗО9. 2. Авторское свидетельство СССР № 228968, кл. О 01 В 7/О2, 1969. ff 28
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКВОПЕЧАТАЮЩИЙ ТЕЛЕГРАФНЫЙ АППАРАТ С ДЕШИФРАТОРОМ ДЛЯ ЗНАКОВ МОРЗЕ | 1926 |
|
SU6809A1 |
| Инклинометр | 1982 |
|
SU1102914A1 |
| Г. М. РЫБКИН и В. Т. ЧиликовВсесоюзный научно-исследовательский инструментальный институт | 1970 |
|
SU282010A1 |
| Шаговый искатель | 1980 |
|
SU892515A1 |
| Устройство для мерной резки лентына гильотинных ножницах | 1974 |
|
SU508345A1 |
| Привод прижимного устройства скважинного прибора | 1977 |
|
SU699163A1 |
| Роторно-конвейерная линия | 1983 |
|
SU1135608A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2005 |
|
RU2307419C2 |
| Станок для заточки многолезвийного инструмента с прямыми канавками | 1986 |
|
SU1395462A1 |
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ МИКРОЭЛЕКТРОДА В НЕРВНЫЕ КЛЕТКИ | 1968 |
|
SU211026A1 |

