2. Электродвигатель по п. 1, отличающийся тем, что упор выполнен в виде установленного в
корпусе резьбового стержня с коническим хвостовиком, входящим в отверстие якоря.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2077108C1 |
| Адресователь груза подъемника | 1974 |
|
SU554198A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2227956C1 |
| ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ и РЕГИСТРАЦИИ МОМЕНТА ПРУЖИННОГО ДВИГАТЕЛЯ | 1973 |
|
SU368582A1 |
| Шаговый электрический двигатель | 1983 |
|
SU1132330A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2210850C2 |
| Реверсивный шаговый двигатель | 1986 |
|
SU1411891A1 |
| Шаговый электродвигатель | 1986 |
|
SU1410214A1 |
| 'ШВ^ГЛЬ'-: • БИБЛИО | 1973 |
|
SU371650A1 |
| Шаговый электродвигатель | 1986 |
|
SU1471260A1 |
1. ШАГОВЫЙ ЭЛЕКТРОДВИГАТВЛЬ, содержащий катушку, индуктивно связанную с постоянньм магнитом, якорь, ведомое колесо, с двумя захватами, упор и корпус, о т л И ч а ю и и йс я тем, что, с целью повьпыения быстродействия, расширения области применения за счет возможности изменения частоты, вращения двигателя и упрощения конструкции, он снабжен упругими элементами, при зтом один конец якоря жестко связан с катушкой, подпружинен относительно связанного с постоянным магнитом.корпуса первым упругим злементсмл и через второй упругий элемент соединен с первым захватом ведомого колеса, второй свободный конец якоря подпружинен относительно корпуса третьим упругим элементом и через -четвертый упругий элемент соединен с вторым захватом ведомого колеса,причем каждый захват выполнен в виде изогнутой плас- j тины с прорезью для прохождения ве(О домого колеса.- ., l Фи.{
Изобретение относится к приборостроению, а именно к электромеханическим исполнительньм устройствам, преобразующим электрическую энергию в дискретное перемещение вала, и может найти применение в различных приборах автоматики.
Известен шаговый электромагнитный двигатель, содержащий электромагнит с обмоткой, сердечником и якорем, храповой механизм с храповым колесом и двумя собачками 1.
Недостатком этого двигателя является низкая надежность, вызванная тем, что вследствие различных уелоВИЙ работы собачек одна из них снашивается быстрее.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является электромагнитный шаговый двигатель, содержащий электромагнит, включающий обмотку, сердечник и якорь, храповой механизм с храповым колесом и двумя собачками, расположенными на якоре электромагнита, возвратную пружину и два упора для собачек, причем храповой механизм имеет второе храповое колесо, кинематически связанное с одной из собачек и снабжено собственным выходным валом 2. .
Недостатками данного электродвигателя являются низкое быстродействие из-за большой массы и, как следст- ви-е, большой инерционности подвижной части двигателя, узкая область применёния из-за невозможности изменения частоты вращения двигателя и сложность конструкции применения большого количества сложных деталей (два храповых колеса и две шеетерни),
Цель изобретения - повышение быстродействия, расширение области применения за счет возможности изменения частоты вращения двигателя и упрощение конструкции.
Поставленная цель достигается тем, что шаговый электродвигатель, содержащий катушку, индуктивно связанную с постоянным магнитом, якорь, ведомое колесо с двумя захватами, упор и корпус, снабжен упругими элементами, при этом один конец якоря жестко связан с катушкой, подпружинен относительно связанного с постояным магнитом корпуса первым упругим
элементом и через второй упругий элемент соединен с первым захватом ведомого колеса, второй свободный конец якоря подпружинен относительно корпуса третьим упругим элементом и через четвертый упругий элемент соединен с вторым захватом ведомого колеса, причем каждый захват выполнен в виде изогнутой пластины с прорезью для прохождения ведомого колеса.
Кроме того, улор выполнен в виде установленного в корпусе резьбового стержня с коническим хвостовиком, входящим в отверстие якоря.
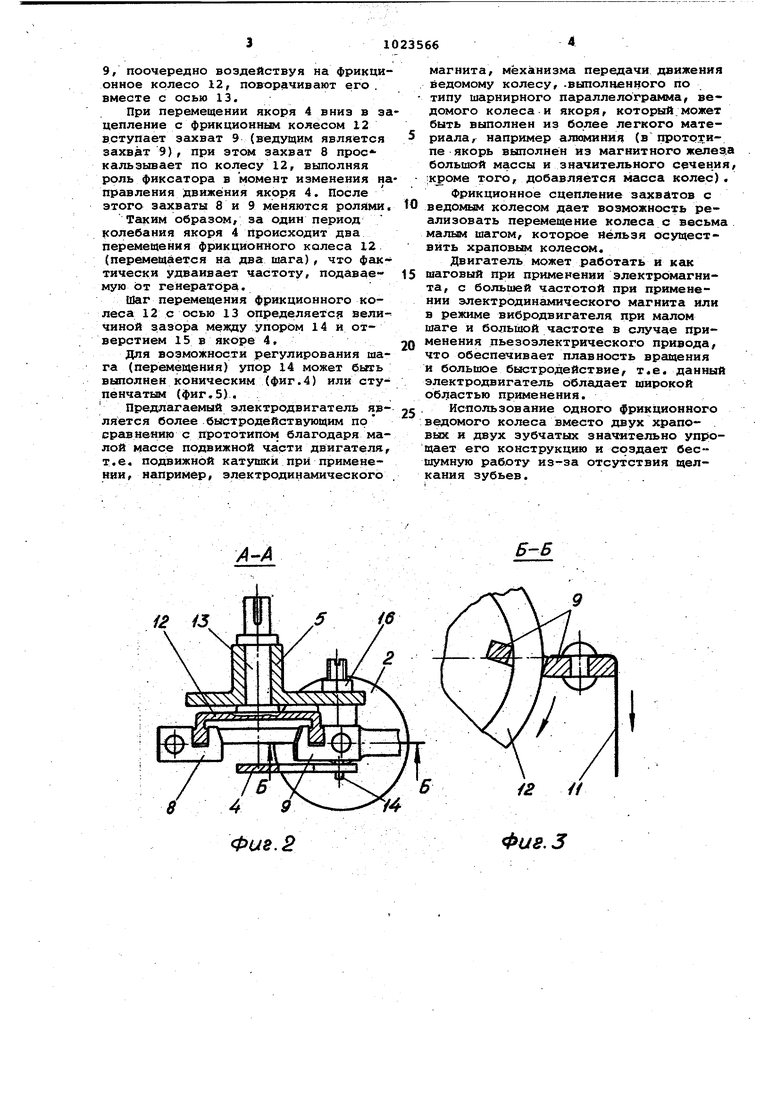
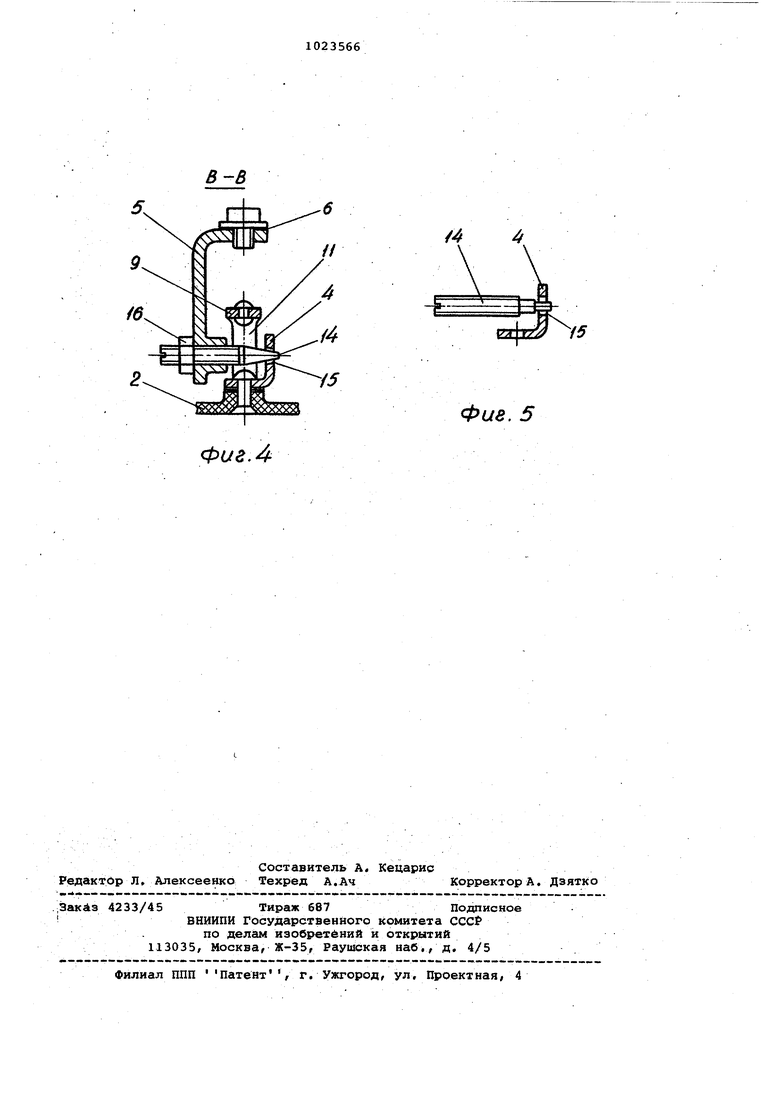
На фигЛ изображен предлагаемый электродвигатель, общий вид на фиг.2 - разрез .А-А на фиг.1; на фиг.З - захват и ведомое колесо, разрез Б-Б на фиг.2 (увеличено); на фиг.4 и 5 - упор конической (разрез В-В на фиг.1) и ступенчатой формы соответственно.
Шаговый электродвигатель (фиг.1-3 содержит, например, электродинамический магнит, включающий постоянный магнит 1, индуктивно связанную с «им катушку 2 с обмоткой 3 и якорь 4, жестко связанный одним концом с катушкоД 2, корпус 5, соединенный с ПОСТОЯНН1ЛМ магнитом 1, упругие элементы - две равные,.например плоские, пружины 6 и 7, связывающие якор 4 с корпусом 5, два фрикционных захвата б) и $, закрепленные на концах якоря 4 с помощью упругих элементов, например.- плоских пружин Ю и 11, ведомое фрикционное колесо 12, связанное с осью 13, упор 14, расположенный в отверстии 15 якоря 4 для ограничения его хода и закрепленный к корпусу 5 с помощью резьбы и контргайки 16.
Электродвигатель работает следующим образом.
При подаче TOifa от генератора (не показан) в обмотку 3 возникает механическое колебание катушки 2 и связанного с ней якоря 4 вместе с фрик ционными захватами 8 и 9. При этом якорь 4, благодаря равенству и параллельности пружин б и 7, совершает поступательное движение как шатун шарнирного параллелограмма с упругими противоположными звеньями б и 7 tt жесткими званьями, образованными якорем 4 и корпусом 5. Захваты 8 и
9, поочередно воздействуя на фрикционное колесо 12, поворачивают его . вместе с осью 13.
При перемещении якоря 4 вниз в зацепление с фрикционным колесом 12 вступает захват 9 (ведущим является захват 9), при этом захват 8 прос кальзьтает по колесу 12, выполняя роль фиксатора в момент изменения на правления движения якоря 4. После этого захваты 8 и 9 меняются ролями.
Таким образом/ за один период колебания якоря 4 происходит два перемещения фрикционного колеса 12 (перемещается на два шага) , что фактически удваивает частоту, подаваемую от генератора.
Шаг перемещения фрикционного колеса 12 с осью 13 определяется величиной зазора между упором 14 и отверстием 15 в якоре 4,
Для возможности регулирования шага (перемещения) упор 14 может быть выполнен коническим (фиг.4) или ступенчатым (фиг.5).
Предлагаемый электродвигатель является более быстродействующим по сравнению с прототипом благодаря малой массе подвижной части двигателя, т.е. подвижной катушки при применении, например, электродинамического
А-А
магнита, механизма передачи движения ведомому колесу, -выполненного по типу шарнирного параллелограмма, ведомого колеса и якоря, который.может быть выполнен из более легкого материала, например алюминия (в прототипе якорь вьшолнен из магнитного желез.а большой массы и значительного сечен.ия, :кроме того, добавляется масса колес).
Фрикционное сцепление захватов с
o ведомьм колесом дает возможность реализовать перемещение колеса с весьма малым шагом, которое нельзя осуществить храповым колесом.
Двигатель может работать и как 5 шаговый при применении электромагнита, с большей частотой при применении электродинамического магнита или в режиме вибродвигателя при малом шаге и большой частоте в случае применения пьезоэлектрического привода/
0 что обеспечивает плавность вращения и большое быстродействиег т.е. данный электродвигатель обладает широкой областью применения.
Использованне одного фрикционного
5 ведомого колеса вместо двух храповых я двух зубчатых значительно упрощает его конструкцию и создает бесшумную работу из-за отсутствия щелкания зубьев.
Б-Б
9
Фив. 5
фиг. 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU271627A1 | |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электромагнитный шаговой двигатель | 1975 |
|
SU548924A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
