7 JV
/
17
tr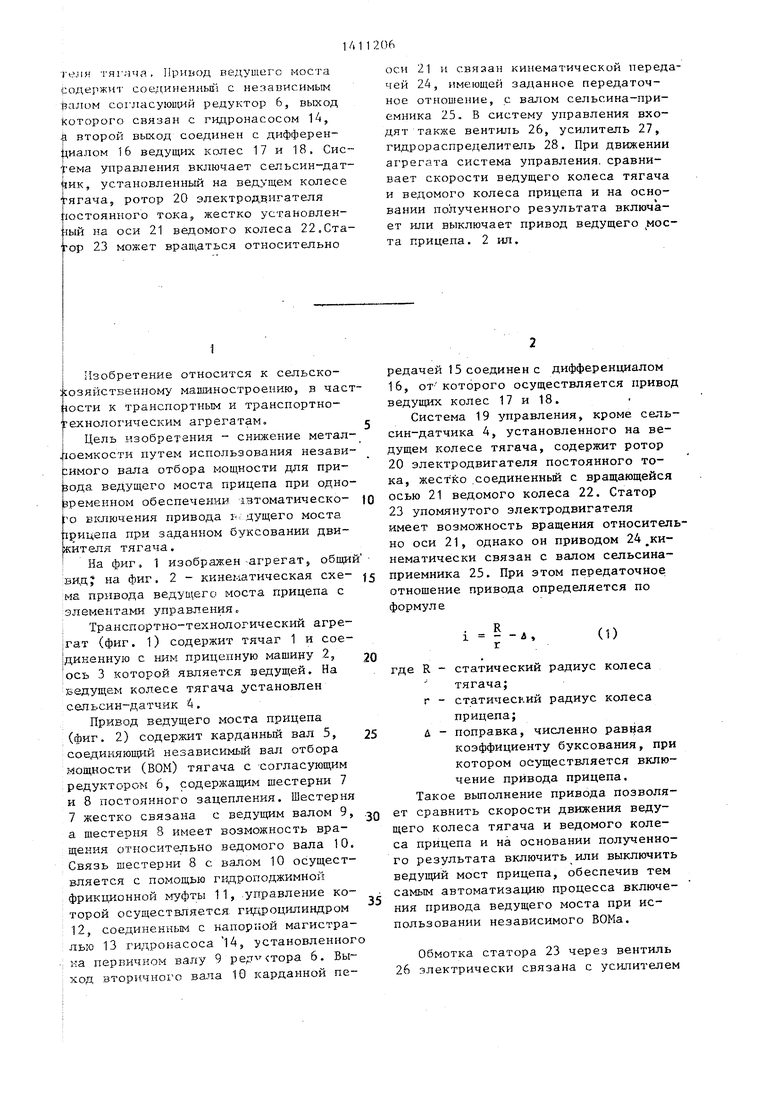
| название | год | авторы | номер документа |
|---|---|---|---|
| Сельскохозяйственный транспортный агрегат повышенной проходимости для внесения удобрений | 1987 |
|
SU1468779A1 |
| Электродинамическая установка для возбуждения сейсмических колебаний в процессе движения | 1987 |
|
SU1550449A2 |
| ТРАНСМИССИЯ ВНЕДОРОЖНЫХ МАШИН, ПРЕИМУЩЕСТВЕННО ТРАКТОРОВ | 1999 |
|
RU2162799C2 |
| КОМБИХОД | 2007 |
|
RU2347709C2 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С ЦЕНТРАЛЬНОЙ СОСТАВНОЙ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2438908C1 |
| Привод ведущего моста прицепа | 1990 |
|
SU1736819A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОАВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2517025C2 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| Привод ведущего моста прицепа | 1986 |
|
SU1369977A1 |
Изобретение относится к сельскохозяйственному машиностроению, прен- мущественно для активизации ходовых систем транспортных и транспортно- технологических машин. Цель изобре- ; тения - снижение металлоемкости конструкции путем использования независимого вала отбора мощности для привода ведущего моста прицепа при однпт временном обеспечении автоматического включения привода ведущего моста прицепа при заданном буксовапни 
к
.
ю
о
гели тягача. Привод ведуи1егс моста Содержит соединенньш с независимым :|залом согласующий редуктор 6, выход Которого связан с гидронасосом 14, .р второй выход соединен с дифферен- j.иaлoм 16 ведущих колес 17 и 18, Сие- j eMa управления включает сельсин-дат- 1ИК, установленный на ведущем колесе тягача, ротор 20 электродвигателя юстоянного тока, жестко установлен- 1ьш на оси 21 ведомого колеса 22,Ста- ор 23 может вращаться относительно
1
Изобретение относится к сельско- озяйственному машиностроению, в часности к транспортным и транспортно- гехнологическим агрегатам,
I Цель изобретения - снижение метал | оемкости путем использования незави |:нмого вала отбора мощности для при- зода ведущего моста прицепа при одновременном обеспечении автоматическо- : о Е1а1ючения привода г-; дущего моста 1рицепа при заданном буксовании движителя тягача.
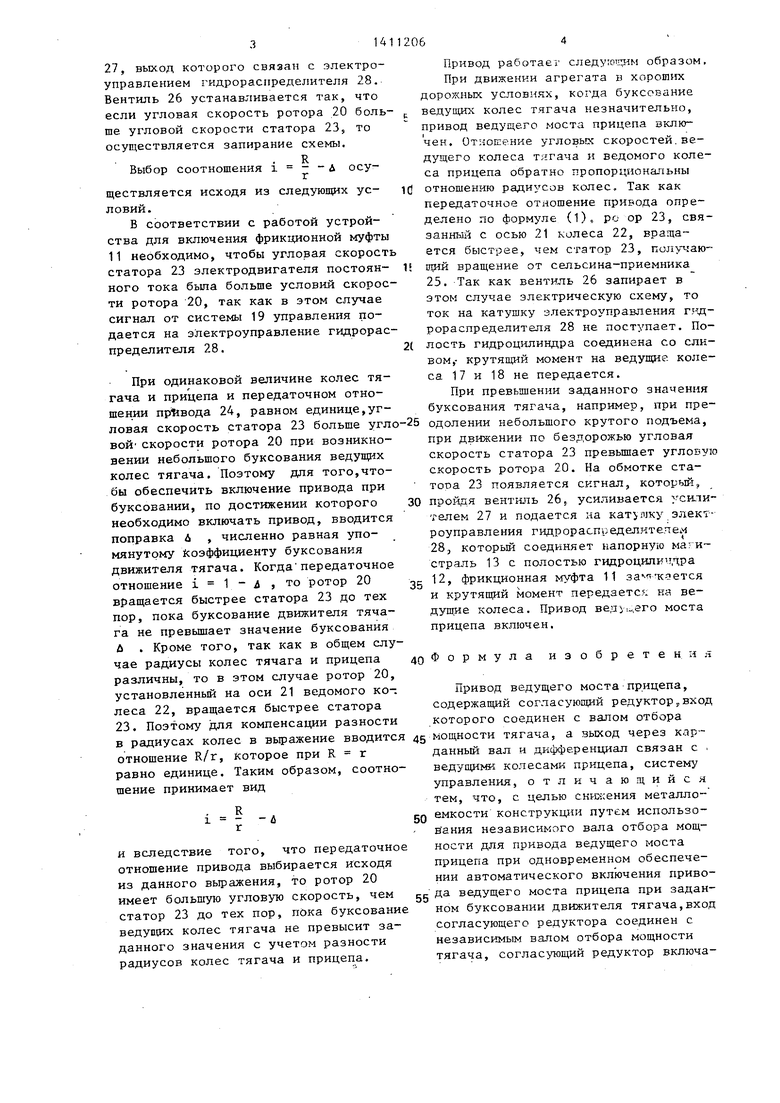
; На фиг, 1 изображен-агрегат, общи вид на фиг. 2 - кинематическая схе- ма привода ведущего моста прицепа с элементами управления. : Транспортно-технологический агре- |гат (фиг. 1) содержит тячаг 1 и сое- |дикениую с ним прицеиную машину 2, ось 3 которой является ведущей. На ведущем колесе тягача установлен сел ьсин-датчик .
Привод ведущего моста прицепа (фиг. 2) содержит карданный вал 5, соединяющий независимый вал отбора мощности (ВОМ) тягача с Согласующим редуктором 6, содержащим шестерни 7 и 8 постоянного зацепления. Шестерня 7 жестко связана с ведущим валом 9, а шестерня 8 имеет возможность вращения относительно ведомого вала 10. Связь шестерни 8 с валом 10 осуществляется с помощью гвдроподжимной фрикционной муфты 11, управление которой осуществляется, гцгфоцилиндром 12, соединенным с напор .;ой магистралью 13 гидронасоса 14, установленног иа первичном валу 9 6. Выход вторичного вала 10 карданной пе
оси 21 и связан кинематической нереда чей 24, имеющей заданное передаточное отнощение, с валом сельсина-приемника 25. В систему управления входят также вентиль 26, усилитель 27, гидрораспределитель 28. При движении агрег.та система управления, сравнивает скорости ведущего колеса тягача и ведомого колеса прицепа и на основании полученного результата включает или выключает привод ведущего моста прицепа. 2 ил.
редачей 15 соединен с дифференциалом 16, от которого осуществляется привод ведущих колес 17 и 18.
Система 19 управления, кроме сельсин-датчика 4, установленного на ведущем колесе тягача, содержит ротор 20 электродвигателя постоянного тока, жестко .соединенньй с вращающейся осью 21 ведомого колеса 22. Статор 23 упомянутого электродвигателя имеет возможность вращения относительно оси 21, однако он приводом 24 кинематически связан с валом сельсина- приемника 25. При этом передаточное отношение привода определяется по формуле
R
(1)
где R - статический радиус колеса тягача; г - статический радиус колеса
прицепа; д - поправка, численно равная
коэффициенту буксования, при котором осуществляется включение привода прицепа. Такое выполнение привода позволяет сравнить скорости движения ведущего колеса тягача и ведомого колеса прицепа и на основании полученного результата включить или выключить ведущий мост прицепа, обеспечив тем самым автоматизацию процесса включения привода ведущего моста при использовании независимого ВОМа.
Обмотка статора 23 через вентиль 26 электрически связана с усилителем
27, выход которого связан с злектро- управлением гидрораспределителя 28. Вентиль 26 устанавливается так, что если угловая скорость ротора 20 больше угловой скорости статора 23, то осуществляется запирание схемы.
R
Выбор соотношения i - -д осуществляется исходя из следующих условий.
В соответствии с работой устройства для включения фрикционной муфты 11 необходимо, чтобы угловая скорост статора 23 электродвигателя постоянного тока была больше условий скорости ротора 20, так как в этом случае сигнал от системы 19 управления подается на электроуправление гидрораспределителя 28.
При одинаковой величине колес тягача и прицепа и передаточном отношении пр11вода 24, равном единице,угловая скорость статора 23 больше углвой скорости ротора 20 при возникновении небольшого буксования ведущих колес тягача. Поэтому для того,чтобы обеспечить включение привода при буксовании, по достижении которого необходимо включать привод, вводится поправка Д , численно равная упомянутому Коэффициенту буксования движителя тягача. Когда передаточное отношение i 1 - л , то ротор 20 вращается быстрее статора 23 до тех пор, пока буксование движителя тяча- га не превышает значение буксования Д . Кроме того, так как в общем случае радиусы колес тячага и прицепа различны, то в этом случае ротор 20, установленньй на оси 21 ведомого ко-, леса 22, вращается быстрее статора 23. Поэтому для компенсации разности в радиусах колес в выражение вводитс отношение R/r, которое при R г равно единице. Таким образом, соотношение принимает вид
R
и вследствие того, что передаточное отношение привода выбирается исходя из данного вьфажения, то ротор 20 имеет большую угловую скорость, чем статор 23 до тех пор, пока буксование ведуп5кх колес тягача не превысит заданного значения с учетом разности радиусов колес тягача и прицепа.
Привод работаег следуютстм образом. При движении агрегата в хороших дорожных условиях, когда буксование
ведущих колес тягача незначительно, привод ведущего моста прицепа включен. Отношение угловых скоростей.ведущего колеса тягача и ведомого колеса прицепа обратно пропорциональны
отношению радиусов колес. Так как передаточное отношение привода определено по формуле (1), ро ор 23, свя- занньй с осью 21 колеса 22, вращается быстрее, чем статор 23, получающий вращение от сельсина-приемника 25. Так как вентиль 26 запирает в этом случае электрическую схему, то ток на катушку злектроуправления гид- рораспределителя 28 не поступает. Полость гидроцилиндра соединена со сливом,- кpyтяшJ й момент на ведущие колеса 17 и 18 не передается.
При превьш1ении заданного значения буксования тягача, например, при пре- одолении небольшого крутого подъема, при движении по бездорожью угловая скорость статора 23 превышает угловую скорость ротора 20. На обмотке ста- TODa 23 появляется сигнал, который,
пройдя вентг-шь 26, усиливается сили- телем 27 и подается на катушку электроуправления гидрораспределктепем 28, который соединяет напорную магистраль 13 с полостью гидроцили1: дра
12, фрикционная муфта 11 sa- f к-зется и крутящий момент передаете : на ведущие колеса. Привод веду1,аго моста прицепа включен.
Ф о р м у л а и 3 о б р е т е н, li я
Привод ведущего моста-прицепа, содержащий согласующий редуктор j,вход которого соединен с валом отбора
10Щности тягача, а выход через карданный вал н дифференциал связан с ведуши &1 колесами прицепа, систему управления, отличающийся тем, что, с целью сни сения металлоемкости конструкции путем использо- независимого вала отбора мощности для привода ведущего моста прицепа при одновременном обеспечении автоматического вкл ючения привода ведущего моста прицепа при заданном буксовании движителя тягача,вход согласующего редуктора соединен с независимым валом отбора мощности тягача, согласующий редуктор включа
5, 14
ет в себя, шестерни постоянного зацепления, первая из которых жестко гстановлена на редущем валу, вторая - с возможностью вращения относительно (ведомого вала, а привод содержит фрикционную муфту для соединения вто- 1рой шестерни с соответствующим валом, Ьистема управления включает в себя Ьельсин-датчик, который установлен на ведущем колесе тягача и электрически соединен с сельсином-приемником, вал которого посредством привода соединен со статором электродвигателя постоянного тока, свободно вращающимся относительно оси неведущего колеса, на котором жестко уста- |новлен ротор упомянутого электродви- Ьателя, причем привод выполнен с пере (даточным отношением- i, равным
//////; г///1 / /У///Г//////
6 3
Фиг. /
1206
где R и г
0
5
20
статические радиусы колес соответственно тягача и прицепа;
U - поправка, численно равная коэффициенту буксования движителя тягача, при котором осуществляется включение привода прицепа,
а обмотка статора через вентиль электрически связана с усилителем, выход которого соединен с обмоткой электромагнита управления двухпози- ционного гидрораспределителя, вход которого соединен с напорной магистралью гидросистемы, первый выход связан с полостью гидроцшшндра фрикционной муфты, а второй вьжод - со сливом, причем вентиль подключен к обмотке статора своим запирающим входом, а насос гидросистемы связан с входным валом согласующего редуктора.
| Миркитанов В.И., Баканчиков В.А | |||
| Перспективные тракторные прицепы | |||
| Техника в сельском хозяйстве, 1985, 10, с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
