Изобретение относится к трубоирокатно- NJiy производству и касается усовершеиство- ||ания станов холодной прокатки труб с грузовым уравновешиванием возвратно-носту- ||1ательно перемещающихся масс. : Цель изобретения - увеличение произ- бодительности, ювын1енис надежности работы и упрощение конструкции.
На фиг. 1 изображена кинематическая хема стана; на фи1 . 2 -- схема, план. I , Стан содержит рабочую клеть 1, уста- |новленную на направляющих, вынолненных IB виде горизонтальных цилиндрических |ц1танг 2 иод онорные втулки 3 корнуса клети, |г1ривод возвратно-поступательного переме- Ццения клети, имеющий ротор 4 зубчатый I привод 5 вращения ротора и вертикально ус- |таповлеиный в роторе со смещением относи- |тельно оси вращения кривощииный вал 6с парой кривоп1инов 7 и 8. Кривошип 7 сое- динеп с корпусом клети, а с развернутым па 180° кривон ипом 8 соединен уравиовещиваю- щий груз 9, установленный в нанравляю- щих, выполненных в виде цилиндрических щтанг 10 под онорные втулки 11 корнуса уравновешивающего груза. Нагфавляющие клети и груза раз.мещены взаимно пернен- дикулярно. На фиг. 2 обозначены О -- ось вран1епия ротора; А - ось вращения криво- тина вала, имеющего смещение от оси вращения ротора; Б - место присоединения кривошипного пальца 7 к корпусу клети; В - место присоединения кривощинно о пальца 8 к уравповецшвающему i-рузу, при этом В А б, АБ в.
Стан работает следующим образом.
Совместно с ротором в нодшинниковой опоре вращается кривошиппый вал 6, вра- П1ательное движение которого нреобразует- ся в нрямолинейное возвратпо-постунатель- ное перемещение его кривошипных пальцев 7 Г1-8 и шарнирно соединенных с ними корпуса клети 1 и уравновешивающего груза 9, которые неремещаются взаимоиернен- дикулярно. Характер их неремещения можно объяснить тем, что каждый из кривошипных пальцев 7 и 8 совершает возвратно-поступательное движение по двухветьевой гипоциклоиде, т.е. но нрямым ГЕ и ДЖ (ем. фиг. 2), а так как плечи бив кривошип- иых пальцев 7 и 8 равны между собой, равны смеи1ению а оси кривошипного вала от оси ротора и четверти длины хода клети (ГЕ) то характер двухплечевой гипоциклоиды обусловлен иаиравляюп1ими ГЕ движения точки Б и на1-фавляющими ДЖ движения точки В, расположенными пернендикуляр1из друг другу. Как известно, кривая, описанная точкой, лежащей на окружности, при качении этой окружности без скольжения внутри другой окружноети, носит характер гипоциклоиды, число ветвей которой равно отношению их радиуеов. Если это отноше5
ние равно двум, то две ветвп гипоциклоиды вырождаются в диаметр бо. 1ыц(й ненод- вижной окружности, а вьцпеуказа.пная точка перемеп1ается прямолинейно по диаметру неподвижной окружности по косинусоидаль- 1юму закону, что следует из уравнения движения точки, огп-1сывающей гипоциклоиду в случае внутреннего обкатывания, когда радиус малой окружности вдвое меньше радиуса бо.льн1ой не11одвил ной окружности. ЦикQ личный характер изменения перемещения корпуса клети и уравновешиваюп1его груза предопреде;1Я1 т коси пу сои да льны и характер изменения сил инерции подвижных масс и синусоидальны характер изменения динамических моментов от этих сил, а равенство их перемещений и .масс определяет равпое значение ускорений, сил инерции и динамических .MOMeirroB в функции р иово- рота ротора 1. Диаметра-льно противоположное расположение кривошипных иаль0 I . 7 и 8 позво;1яет полностью уравновесить динамичеекие моменты от движения корнуса клети 1 и 1 руза, т.е. замкнулт их па кривошипном валу и получить суммарный динамический момент, равный , так как разгону корнуса клети 1 соответствует тор- можепне уравновещивающе1 о груза, при- че.м в момент достижения корнусом клети наивысшей скорости уравповенщваюнш груз достигает своей мертвой точки, и наоборот.
Горизонтальное взаимоиерненднкуляр- ное иеремещепие корпуса клети и уравновешивающего груза де. возможным нолцое уравновешивание динамических усилий и моментов путем точного подбора мас5 - УР звновещиваюп1его груза, paBiioro по маесе корпусу к, 1ети, что сложност - ч.- iipea- ставляет. Точное уравновешивап .к клети при уменьщегп-1И ее возвратно-посл унательпо движущихся масс за счег неиосредственпого соединения клети с криво1пипом и станов- ка ее и уравновещивающего груза посредством с.менных втулок на цилиндрических направляющих позволяет увеличить быстроходность кл(;ти, повысить износостойкость и ремоптопригодность деталей и силовых
5 узлов привода и этпм - надежность и долговечность его работы. Совокушюсть конструктивных признаков обеснечит иовыше- ние нроизводительности всего стана.
5
0
50
Формула изобретения
Стан холодной нрокатки труб, содержа- пгий установленную на нагфавляющих опорах рабочую клеть и ее привод возврат1ю- поступательного перемещения, имеющий ро- тор, зубчатый иривод вращения ротора и становленный в роторе со смещением относительно оси вранлен.ия кривошипный вал с парой развернутых друг относительно друга
на 180° кривошипов, один из которых шар- нирно соединен с корнусом к.чети.ы уравновешивающий груз, шарнирно соединенны с другим кривошипом и установленный опорами в направляющих с возможностью возвратно-поступательного перемеп|епия в перпендикулярном 1ереме111.ению к,1ети направлении, отличающийся тем, что, с целью увеличения 1рс)изв()дите, Н)Н()сти, повышения надежности работы и упрощения конструкции, кривопшнньи вал установ.чен вертика. илю, нри этом оноры клети и уравновеи1ивак)Н1его |-руза вынолнены в виде сменных втулок, а направляющие - в виде цилиндрических шганг под опорные вту.мкп, размешепных горизонтально.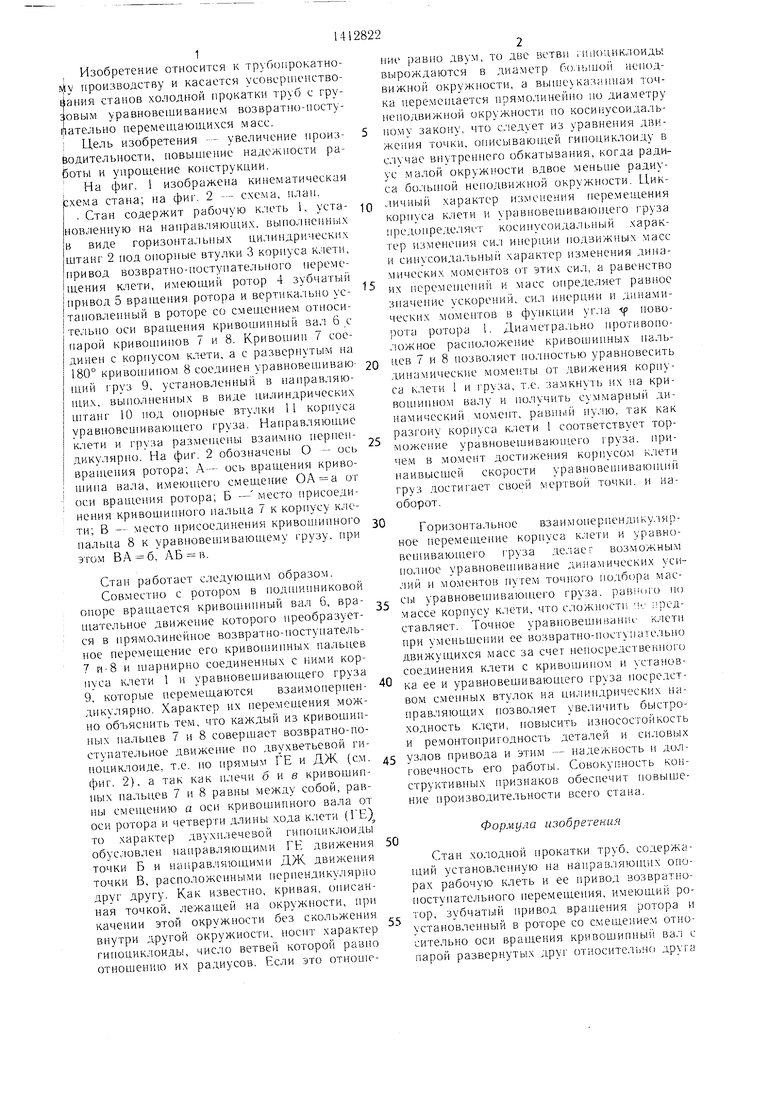
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод возвратно-поступательного перемещения частей стана холодной прокатки труб | 1981 |
|
SU1062946A1 |
| Привод возвратно-поступательного перемещения клетей многоклетьевого стана | 1985 |
|
SU1319949A1 |
| Привод стана холодной прокатки труб | 1987 |
|
SU1482741A1 |
| Привод клети стана холодной прокатки труб | 1987 |
|
SU1447448A1 |
| ПРИВОД СТАНА ХОЛОДНОЙ ПИЛЬГЕРНОЙ ПРОКАТКИ ТРУБ | 2003 |
|
RU2271257C2 |
| Привод клети стана холодной прокатки труб | 2015 |
|
RU2612110C2 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ КЛЕТИ СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1990 |
|
RU2030228C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ТРУБ ХОЛОДНЫМ ПИЛЬГЕРОВАНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2205075C2 |
| Способ уравновешивания динамического момента на входном валу привода возвратно-движущихся масс и устройство для его осуществления | 1990 |
|
SU1724970A1 |
| СИСТЕМА ПРИВОДА ДЛЯ СТАНА ХОЛОДНОЙ ПИЛЬГЕРНОЙ ПРОКАТКИ | 2003 |
|
RU2247613C1 |

Изобретение относится к трубопрокатному производству и касается усовершенствования станов холодной прокатки труб с грузовым уравновешиванием возвратно-поступательно перемещающихся масс. Цель изобретения - увеличение производительV///////// Фиг. J ности, повышение надежности работы и упрощение конструкции. Стан холодной прокатки труб содержит установленную на направляющих рабочую валковую клеть 1, имеющую привод возвратно-поступательного перемещения в виде ротора 4 и установленного в роторе со смещением относительно оси вращения кривощипного вала 6 с парой кривошипов 7 и 8. Кривощип 7 соединен с корпусом клети, а с кривошипом 8 связан уравновешивающий груз 9, установленный в направляющих с возможностью возвратно-поступательного перемещения. Направляющие клети и уравновешивающего груза выполнены в виде горизонтальных ци линдрических штанг под опорные втулки корпусов клети и груза. 2 ил. i (Л tSD 00 1чЭ 1чЭ W 777
| Патент ФРГ № 3221803, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
