Изобретение относится к машино- строению, в частности к конструкции систем управления оборудованием для обработки давлением.
Целью изобретения является повышение производительности ковки за счет снижения числа переключений операций и режимов управления, а также улучшения условий обслуживания.
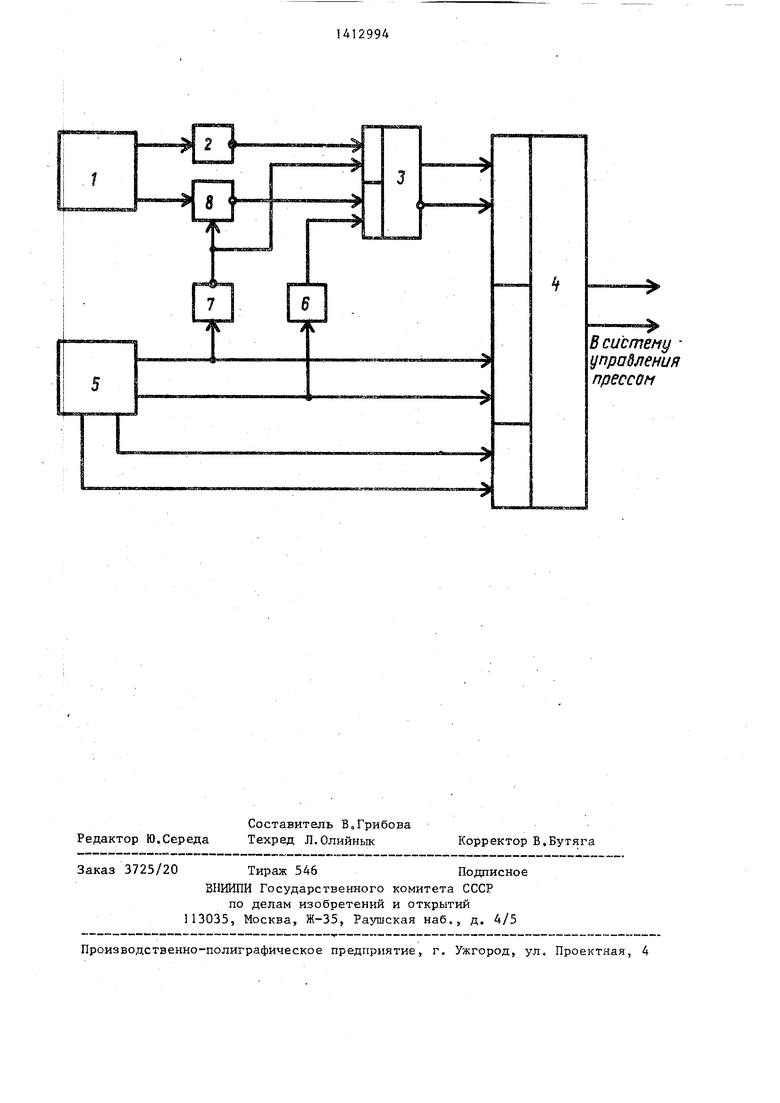
На чертеже приведена блок -схема предлагаемого устройства.
Устройство содержит блок 1 позиционирования бойка пресса, первьй выход которого подключен к первому инвертору 2, выход которого соединен с первым S-входом триггера 3, оба выхода которого подключены к первой паре информационных входов коммутатора 4 режимов работы, управляющая ру- коятка 5 (с встроенными двумя кнопками), формирователь 6 импульсов, втрой инвертор 7 и схема 2И-НЕ 8.
Первые два выхода управляющей рукоятки 5 подключены к второй паре ин формационных входов коммутатора 4 режимов работы, один из них также подключен к входу формирователя 6 импулсов, выход которого подключен к первому R-входу триггера 3, а второй вы ход рукоятки 5 подключен к входу инвертора 7, выход которого соединен с вторым входом схемы 2И-НЕ Вис вторым S-входом триггера 3, второй R-вход которого подключен к выходу схемы 2И-НЕ 8, первый вход которой соединен с вторым выходом блока 1 позиционирования бойка пресса, а третий и четвертый выходы управляющей рукоятки 5 соединены с двумя управ- ляющими входами коммутатора 4 режимо работы, выходы которого являются выходами устройства (и подключаются в .систему управления прессом).
Устройство работает следующим образом.
Нажатием кнопки выбора режимов, расположенной на управляющей рукоятке 5, выбирают необходимый режим ра- боты. Сигнал с управляющей рукоятки 5 поступает на управляющий вход ручного режима коммутатора 4 режимов работы, подключая тем самым на выход коммутатора команды на движение бой- ка пресса от рукоятки 5, причем отклонение рукоятки 5 обеспечивает движение вниз, а возвращение в нейтральное положение - движение вверх.
Команда на начало движения и останов осуществляется воздействием на пусковую кнопку рукоятки 5. При отпускании кнопки выбора режимов сигнал подается на управляющий вход полуавтоматического режима работы коммутатора 4 режимов работы, подключая к выходу команды управления с триггера 3.
Режим работы Полуавтоматический представляет собой сочетание Автоматического режима и режима Автостоп Режим автостоп образуется путем отклонения рукоятки 5 и нажатия пусковой кнопки, при этом команда от рукоятки 5 на движение вниз через формирователь 6 импульсов поступает на второй R-вход триггера 3, обеспечивая на выходе устройства команду на ход бойка пресса вниз. При достижении бойком положения, заданного размером ковки с блока 1 позиционирования бойка пресса поступит сигнал на ход бойка вверх, который, инвертируясь инвертором 2, воздействует на первый S-вход триггера 3, обеспечивая на выходе устройства команду на движение бойка пресса вверх. Эта команда поступит и при удержании рукоятки 5 в отклоненном положении, так как формирователь 6 импульсов выдает короткий импульс только по фронту управляющего сигнала от управляющей рукоятки. Если продолжать удерживать рукоятку 5 в отклоненном положении, то при достижении бойком пресса верхнего заданного положения с блока 1 позиционирования бойка пресса поступит сигнал на движение вниз бойка пресса, который поступает на вход схемы 2И-НЕ 8 и, инвертируясь, сбрасывает триггер 3, обеспечивая тем самым выдачу команды с выхода устройства, на ход бойка вниз, т.е. при удержании рукоятки 5 в отклоненном состоянии обеспечивается режим работы Автоматический, но при. отпускании рукоятки 5 сигнал, инвертируясь инвертором 7, поступит на З-вход триггера 3, устанавливая его в состояние, соответствующее выдаче сигнала на ход бойка вверх, причем команда на ход вниз,может поступить от рукоятки 5 в любой момент времени, обеспечивая тем самым режим работы Автостоп. Кроме того, при вторичном нажатии пусковой кнопки на рукоятке 5, выходь: которой отключаются от входов триггера 3, обеспечивая работу пресса только от блока 1
позиционирования бойка пресса, автоматический режим обеспечивается уже без воздействия оператора на рукоятку 5. Для останова программы ковки необходимо еще раз нажать на пусковую кнопку рукоятки 5, посла чего сигнал на ход вверх от рукоятки 5 через инвертор 7 поступит на второй S-вХод триггера 3, устанавливая последний в состояние, соответствующее команде на ход вверх. Сигнал на ход вниз от блока 1 позиционирования бййка пресса на R-вход триггера не поступает, так как схемы 2И-НЕ 8 блокируется ин версным сигналом хода вверх рукоятки 5. Боек пресса, дойдя до верхнего положения, останавливается. Цикл работы при этом заканчивается.
Эффективность использования предлагаемого устройства состоит в том, что исключение из устройства переключателя режимов работы и кнопочной станции управления позволяет снизить число выполняемых операций перекпю- ний и улучшить условия обслуживания ковочного пресса, а именно снижается утомляемость оператора, устраняются непроизводительные потери времени и повьппается производительность ковки.
Формула изобретения
Устройство для управления гидравлическим ковочным прессом, содержащее , блок поэицирования бойка пресса, коммутатор режимов работы, управляю-,
0
5
0
5
0
шую рукоятку с кнопками, а также формирователь импульсов и четырехвходо- вый триггер, выходы которого подключены к первому и второму информационным входам коммутатора режимов работы, третий и четвертый информационные входы которого соединены с первым и вторым выходами управляющей рукоятки, третий и четвертый выходы которой подключены к двум управляющим входам коммутатора режимов работы, а первый R-вход триггера соединен с выходом формирователя импульсов, вход которого подключен к первому выходу управляющей рукоятки, отличающееся тем, что, с целью повьшения производительности ковки за счет снижения числа переключений операции и режимов управления, а также улучшения условий обслуживания, оно снабжено двумя инверторами и схемой 2И-НЕ, причем вход первого инвертора соединен с первым выходом блока позиционирования бойка пресса, второй вход которого соединен с первым входом схемы 2И-НЕ, второй выход которой соединен с выходом второго инвертора, а выход схемы 2И-НЕ подключен к второму R-входу триггера, выход первого инвертора подключен к первому S-входу триггера, второй S-вход которого подключен к выходу второго инвертора, при этом вход второго инвертора сое- динен с вторым выходом управляющей рукоятки,а выходы коммутатора режимов работы являются выходами устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| Электромагнитный привод ударного действия | 1990 |
|
SU1745920A1 |
| Устройство управления электрофицированной дождевальной машиной | 1988 |
|
SU1547783A1 |
| Устройство для определения содержания связующего в стеклопластиках | 1984 |
|
SU1265538A1 |
| Устройство для управления шаговым двигателем | 1982 |
|
SU1091122A1 |
| Распределитель импульсов | 1978 |
|
SU771873A1 |
| Система управления клапанами газораспределения с электрогидравлическим приводом | 1981 |
|
SU985338A1 |
| Устройство для ультразвуковой сварки | 1988 |
|
SU1569146A1 |
| Устройство для управления преобразователем частоты | 1988 |
|
SU1629953A1 |
Изобретение относится к машиностроению, в частности к конструкции систем управления оборудованием для обработки давлением. Цель изобретения - повьппение производительности ковки за счет снижения числа переключений операций и режимов управления, а также улучшение условий обслуживания. Цель достигается за счет совместного использования в устройстве управляющей рукоятки с встроенными в нее двумя кнопками, соединенной с коммутатором режимов работы, а также триггера, двух инверторов и схемы 2И-НЕ. Управление движениями бойка ковочного пресса осуществляется одновременным нажатием на кнопки и отклонением управляющей рукоятки. В устройстве исключаются переключения для смены операций и режимов. 1 ил. ш (Л
| Рыжков Н.А..и Краков Л.М | |||
| Система управления автоматизированным комплексом для свободной ковки. |
