00
ел
со 1
1.141
Изобретение относится к области технологии приборостроения, в частности к часовой промышленности, и предназначено для использования при автоматизации различного рода технологических и сборочных процессов.
Целью изобретения является повышение производительности процесса правки часовых колес, путем сокращения числа наносимых на исправляемое колесо ударов до двух и расширение технологических возможностей за счет
определения параметра плотность посадки колеса на трибе „
На чертеже дана схема, поясняющая данный способ
Схема включает триб 1 с насаженным на него колесом 2, центры 3,4 (привод условно не показан), щуп 5, датчик биения 6, аналого-цифровой усилитель-преобразователь 7, блок 8 задания параметров процесса правки величины или пропорциональные им значения допустимого биения, допуск на момент сил сопротивления повороту плоскости колеса в положение перпендикулярное оси триба, и величины кинетической энергии первого удара), датчик 9 величины энергии, накопитель 10 энергии, устройство II управления зарядкой накопителя 10 энергии, источник 12 энергии, пусковое
устройство 13, разряжающее энергию, запасенную в накопителе 10 энергии, на молоточек ударного механизма 14, цифровое вычислительное устройство 1
Система питания электроэнергией указанных блоков условно не показана При этом триб 1 с колесом 2 установлен и вращается в центрах 3,4 Щуп 5, касаясь обода колеса 2, пере- дае т колебания на датчик 6 биения, сигналы с которого поступают на один из трех входов аналого-цифрового усилителя-преобразователя 7 (два других его входа подключены соответственно к.выходу блока 8 задания параметров правки и к выходу блока 9 датчика энергии), а выход усилите- ля-преобразователя 7 подключен к входу цифрового вычислительного устройства 15, два выхода которого подключены соответственно к входу устройства 11 управления зарядкой накопителя энергии 10 и входу пускового устройства 13, Выход устройства 11 управления зарядкой накопителя энергии 10 соединен с входом последнего.
Q
0
а его второй вход связан с выходом пускового устройства 13, Источник энергии 12 подключен к входу устройства 11 управления зарядкой накопителя энергии Ударный механизм связан с выходом накопителя 10 энергии.
Процесс автоматизированной правки плоскостного биения осуществляется следующим образомо
Информация о величине плоскостного биения и положении точки наибольшего биения колеса 2 через щуп 5, датчик 6 биения, аналого-цифровой 5 усилитель-преобразователь 7 поступает в цифровое вычислительное устройство 15,
В цифровое вычислительное устройство 15 перед запуском партии колес 0 вводятся также через блок 8 задания параметров правки и аналого-цифровой усилитель-преобразователь 7 величина допустимого плоскостного биения, допуск на момент сил сопротивления и 5 величина кинетической энергии первого удара
Цифровое вычислительное устройство 15 вьдает команду в устройство I1 управления зарядкой накопителя энергии 10 на заряд последнего необходимой величиной энергии первого удара.
Информация о фактическом значении
величины энергии в накопителе 10 энергии через датчик 9 энергии и аналого-цифровой усилитель-преобразо- ватель 7 поступает в цифровое вычислительное устройство 15. При выполнении условия равенства энергии в накопителе 10 энергии заданной, на основании информации о положении точки наибольшего биения колеса (в которую необходимо нанести удар), цифровое вычислительное устройство 15 вьщает в необходимый момент времени команду в пусковое устройство - 13, что вызовет высвобождение энергии, запасенной в блоке 10 накопления энергии на ударный механизм 14 Вследствие этого молоточек ударного механизма 14 нанесет удар в точку наибольшего биения колеса 2 При этом плоскость колеса 2 повернется на некоторый угол и плоскостное биение примет новое значение, которое затем через щуп 5, датчик 6 биений и аналого-цифровой усилитель-преобразователь 7 вводится в цифровое вычислительное устройство 15. В цифровом вычислительном
5
0
5
0
5
устройстве 15 по значениям величины плоскостного биения до и после выполнения первого удара определяется значение момента сил, препятствующих повороту плоскости колеса, которое сравнивают с допустимым Если в результате сравнения значение момента сил окажется меньше допустимого, то цифровое вычислительное устройство 15 вьщает команду Брак. В противном случае в цифровом вычислительном устройстве 15 производится сравнение величины плоскостного биения колеса после выполнения первого удара с допустимым Если его величина превышает допуск, то по установленной величине момента сил и величине плоскостного биения после выполнения первого удара вычисляют работу, которую необходимо выполнить при повороте плоскости колеса в положение, перпендикулярное оси триба.
Величина момента сил сопротивления (MJ.) определяется как результат механического воздействия на выпрямляемое колесо, т„ео после выполнения первого удара по колесу
Практически для определения велигии. По достижении в накопителе 10 энергии расчетного значения цифровое вычислительное устройство 15 на осно- вании информации о положении точки наибольшего биения вьщает в пусковое устройство 13 команду на выполнение удара.
Энергия, запасенная в накопителе
10 энергии, разряжается на ударный механизм 14, молоточек которого наносит по выправляемому колесу 2 окончательный удар о
После нанесения окончательного
удара- определяют плоскостное биение колеса и направляют деталь в бункер годных, в противном случае процесс повторяют. .
Формула изобретения
1 о Способ автоматизированной правки плоскостного биения часовых колес, заключающийся в том, что измеряют ве- личину плоскостного биения исправляемого колеса, наносят в месте его наибольшего биения первый удар молоточком по колесу с фиксированным для данной партии колес значением энергии
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированной правки плоскостного биения вращающихся тел | 1981 |
|
SU1365042A1 |
| Устройство для правки и контроля колес | 1976 |
|
SU605196A1 |
| Устройство для правки и контроля вращающихся тел, например, часовых колес | 1977 |
|
SU684498A2 |
| Устройство для правки колес | 1975 |
|
SU534734A1 |
| Устройство для измерения времени рефлекса | 1990 |
|
SU1766373A1 |
| УСТРОЙСТВО ВЫЗОВА НА МОБИЛЬНОМ ТЕЛЕФОНЕ МЕХАНИЧЕСКОЙ АНИМАЦИЕЙ ФИГУРОК АНИМАЦИИ И МОБИЛЬНЫЙ ТЕЛЕФОН С ВЫЗОВОМ МЕХАНИЧЕСКОЙ АНИМАЦИЕЙ ФИГУРОК АНИМАЦИИ | 2013 |
|
RU2539197C1 |
| УСТРОЙСТВО ВЫЗОВА НА МОБИЛЬНОМ ТЕЛЕФОНЕ НАТУРАЛЬНЫМИ ЗВУКАМИ МЕХАНИЧЕСКОГО МУЗЫКАЛЬНОГО ИНСТРУМЕНТА И МОБИЛЬНЫЙ ТЕЛЕФОН С ВЫЗОВОМ НАТУРАЛЬНЫМИ ЗВУКАМИ МЕХАНИЧЕСКОГО МУЗЫКАЛЬНОГО ИНСТРУМЕНТА | 2013 |
|
RU2538090C1 |
| СИГНАЛЬНОЕ УСТРОЙСТВО С ВОЗМОЖНОСТЬЮ ЕГО УСТАНОВКИ НА 30 ДНЕЙ ВПЕРЕД | 2011 |
|
RU2565326C2 |
| Печатающее устройство | 1978 |
|
SU746615A1 |
| УСТРОЙСТВО ВЫЗОВА НА МОБИЛЬНОМ ТЕЛЕФОНЕ НАТУРАЛЬНЫМИ ЗВУКАМИ МЕХАНИЧЕСКОГО МУЗЫКАЛЬНОГО ИНСТРУМЕНТА И/ИЛИ МЕХАНИЧЕСКОЙ АНИМАЦИЕЙ ФИГУРОК АНИМАЦИИ (ВАРИАНТЫ) И МОБИЛЬНЫЙ ТЕЛЕФОН С ВЫЗОВОМ НАТУРАЛЬНЫМИ ЗВУКАМИ МЕХАНИЧЕСКОГО МУЗЫКАЛЬНОГО ИНСТРУМЕНТА И/ИЛИ МЕХАНИЧЕСКОЙ АНИМАЦИЕЙ ФИГУРОК АНИМАЦИИ (ВАРИАНТЫ) | 2012 |
|
RU2513031C1 |
Изобретение предназначено для использования в часовой промьшшеннос- ти при автоматизации технологических и сборочных процессов. Цель изобретения - повьшение производительности процесса правки часовых колес Устройство содержит триб 1 с коле- г сом 2, центры 3 и 4, щуп 5, датчик 6 биения, аналого-цифровой усилитель- преобразователь 7, блок .8 задания параметров процесса правки, датчик 9 величины энергии, накопитель 10 энергии, устройство 11 управления зарядкой накопителя 10 энергии, источник 12 энергии, пусковое устройство 13, ударный механизм 14 и цифровое вычислительное устройство 15 Введение новых элементов и образование новых связей между элементами устройства позволяет сократить число наносимых на исправляемое колесо ударов до двух и расширить технологичес- -кие возможности за счет определения параметра плотность посадки колеса на трибе 1. 1 ил. о (Л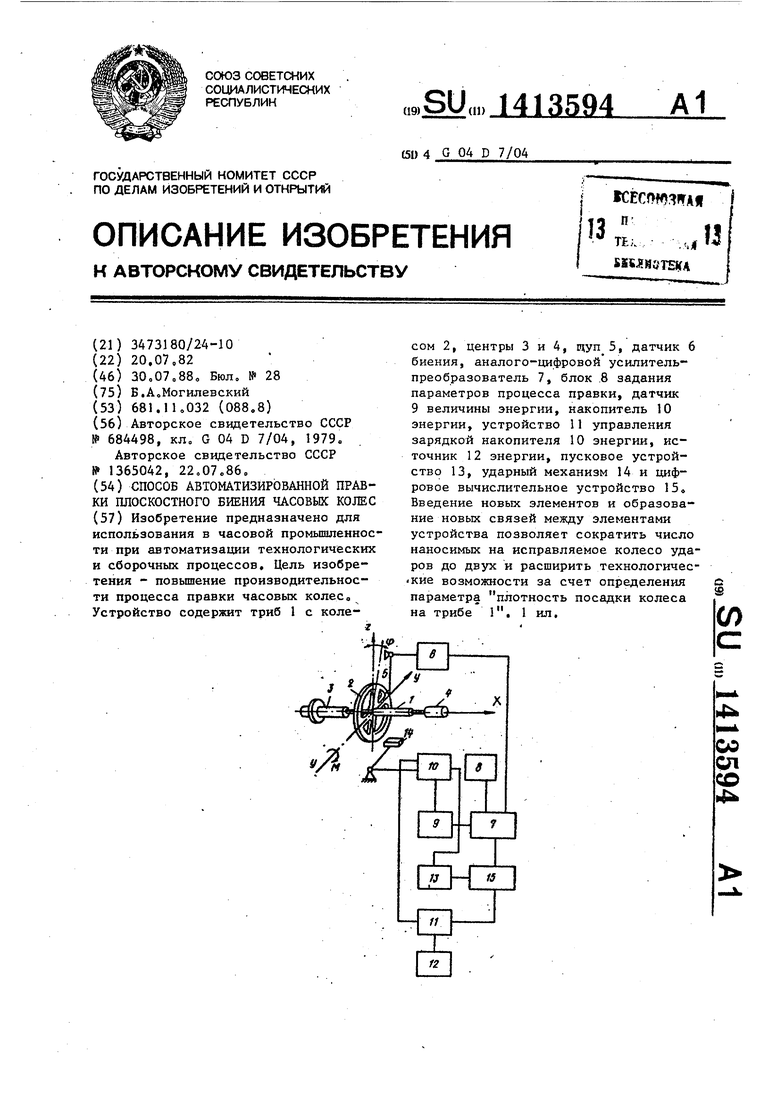
чины М необходимо первый удар по вып- ЗО , измеряют величину плоскостноравляемому колесу выполнить с кинетической энергией молоточка, равной , величина которой известна и постоянна.
Тогда значение величины М, может быть вычислено по формуле
м ЕО
где tfo - величина плоскостного биения колеса, измеренная до выполнения первого удара; Cf, - величина плоскостного биения, измеренная после выполнения первого удара. Значение кинетической энергии, которую должен иметь молоточек в момент с ледующего (второго - окончательного) удара,
Е - .Jl... Е
ч-о-ч, °
Далее цифровое вычислительное устройство 15 выдает соответствующую команду в устройство 11 управления накопителем энергии. Накопитель 10 энергии заряжается от источника 12 энергии до расчетного значения, которое контролируется датчиком 9 энер-
го биения после удара и наносят второй окончательный удар молоточком по колесу с значением энергии, определяемым по формуле
Ч,
Ч-о -О,
где Е.
0
Ч о Ч . 5
0
5
значение энергии удара;
значение энергии первого
удара;
значения плоскостного биения до и после нанесения первого удара,
затем повторно измеряют величину плоскостного биения, отличающийся тем, что, с целью расщи- рения функциональных возможностей за счет обеспечения возможности контроля качества изготовления, значение плоскостного биения после первого удара сравнивают с допустимым значением биения и определяют параметр плотность посадки колеса на трибе по значению момента сил сопротивления, определяемого по формуле
М -Is.
Ч-о -Ф,
где M, - момент сил сопротивления, препятствующий повороту плоскости
5 1413594- 6
колесе в положение, перпендикулярноения точности правки, энергию второоси триба,го удара определяют по формуле
причем процесс правки продолжают,о
если М Мд, где Мд - минимально Е, о 7о 1 сК- п п
допустимый момент сил сопротивления.
2, Способ по, п,1, о т л и ч а ю-величина работы, компенсирующая потещ и и с я тем, что, с целью повыше-ри энергии.
| Устройство для правки и контроля вращающихся тел, например, часовых колес | 1977 |
|
SU684498A2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ автоматизированной правки плоскостного биения вращающихся тел | 1981 |
|
SU1365042A1 |
