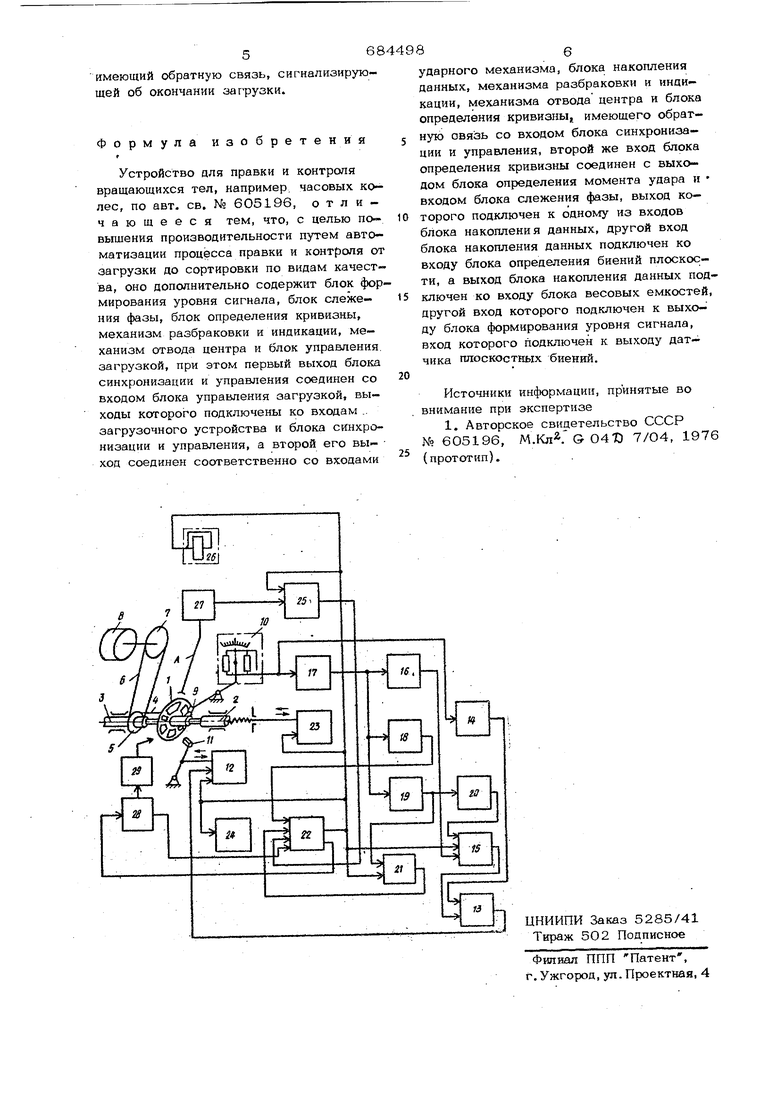
(54) УСТРЮЙСТБО ДЛЯ ПРАВКИ И КОНТРОЛЯ ВРАЩАЮЩИХСЯ ТЕЛ, НАПРИМЕР ЧАСОВЫХ КОЛЕС которого подключен к одному из входов блока накопления данных; другой вход блока накопления данных подключен ко входу блока определения биений плоскости, а выход блока накопления данных подключен ко входу блока весовых емкос тей, другой вход которого подключен к выходу блока формирования уровня сигнала, вход которого подключен к выходу датчика плоскостных биений. На чертеже представлена схема описываемого устройства. Устройство содержит колесо 1, центры 2 и 3, поводок 4, шкив 5, ременную передачу 6, шкив 7, двигатель 8, щуп 9 датчик плоскостных биений Ю, молоток 11, ударный механизм 12, блок весовых емкостей 13, блок формирования уровня сигнала 14, блок накопления данных 15, блок определения биения плоскости 16, усилитель 17, блок точности правки 18 блок определения момента удара 19, блок слежения фазы 2О, блок определениякривизны 21, блок синхронизации и упраап ения 22, механизм отвода центра 23, механизм разбраковки и индикации 24, блок контроля радиального биения 25, исполнительный механизм 26, датчик радиального биения 27, блок управления загрузкйй 28 и загрузочное устройство 29. Устройство работает следующим обра зом. Колесо 1 непрерывно вращается от двигатегкя 8 через ременную передачу 6 При най.ячии биения сигнал от датчика плоско гтных биений 10, пропорциональный величине биения, через усилитель 17 поступает на входы блоков определекня биения плоскости 16, точности прав ки 18, определения момента удара 19 и непосредственно на вход блока формирования уровня сигнала, определяющего начальную силу удара молоточка, зависящего от амплитуды биений плоскости колеса. Этот уровень поступает на вход блока весовых емкостей 13. Если амплитуда биений больше допустимой, блок задания точности правки дает сигнал разрешение правки в удар ный механизм 12. Точка удара молоточ ка 11 расположена относительно точки прикосновения щупа 9 под углом 9О° в сторону отставания, поэтому момент перехода через электрический нуль синусо дального сигнала будет соответствовать моменту нахождения точки максимальног биения в месте действвщ молотка 11. П аднему фронту усиленного и ограниченого сигнала формируется команда на вклюение разрядных тиристоров в блоке 13. Блок определения биения плоскости 16 выдает импульсы после каждого удара молоточка 11, если амплитуда биений аа период одного оборота колеса не уменьшается на заданную величину изменения напряжения на конденсаторе. При этом импульсы суммируются в реверсивном счетчике блока 15, и сила молоточка начинает нарастать, В случае, если сила удара молоточка окажется большей, чем это необходимо для выправления данного колеса, блок слежения фазы 20 по сигналу перебил блока 19 выдает сигнал вычитание на вход реверсивного счетчика блока 15, и сила следующего удара молоточка уменьшается. Как уолько амплитуда биений войдет в допуск, блок 18 выдает сигнал запрет правки в блок 22, по которому блоки 12, 13, 15 возвратятся в исходное состояние. Одновременно запускается одновибратор в блоке 22, который через усилитель включает исполнительный механизм 26, и щуп А датчика радиальных биений 27 опускается на обод колеса 1. Сигнал биений поступает в блок контроля радиального биения 25. Если биение в допуске, то блок 25 через логическую схему блока 22 выдает в ме- ханизм разбраковки и индикации 24 сигнал годное. Одновременно блок 22 выдает сигнал в механизм отвода центра 23. Колесо при этом выпадет в ячейку для годных деталей. Если биения больше допустимых, то блок 25 вьщает сигнал брак РБ, и колесо выпадет в соответствующую ячейку. В устройстве предусмотрена блокировка правки и контроля радиального биения гнутых колес. В том случае, если колесо гнутое, т. а. имеет кривизну, блок определения кривизны 21 выдает в блок 22 сигнал запрет правки и проверки радиального биения, в результате чего сработает механизм разбраковки и индикации, и колесо выпадает в ячейку брак ПБ без затраты времени на йравку плоскостного и контроль радиального биений. Загрузка деталей осуществляется загрузочным устройством 29, работа которого управляется блоком управления загрузки по команде, поступающей с блока синхронизации и управления на его вход.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для правки и контроля колес | 1976 |
|
SU605196A1 |
| Способ автоматизированной правки плоскостного биения часовых колес | 1982 |
|
SU1413594A1 |
| Способ автоматизированной правки плоскостного биения вращающихся тел | 1981 |
|
SU1365042A1 |
| Устройство для правки колес | 1975 |
|
SU534734A1 |
| Система управления агрегатом правки цилиндрических изделий | 1981 |
|
SU1074621A1 |
| Устройство для контроля геометрических параметров полупроводниковых пластин | 1982 |
|
SU1106983A1 |
| Система управления гидроагрегатом правки цилиндрических заготовок | 1981 |
|
SU1009555A1 |
| СПОСОБ КОНТРОЛЯ НЕДОРЕЗА РЕЗЬБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349873C1 |
| Система управления правильным агрегатом | 1977 |
|
SU733775A1 |
| Устройство для автоматического контроля биения зубчатого венца | 1980 |
|
SU894355A1 |
