i
(Л
1
Изобретение относится к области приборостроения, в частности к часовой промышленности и предназначено для использования при автоматизации различного рода технологических и сборочных процессов.
Целью изобретения является повышение производительности процесса правки за счет сокращения числа ударов.
На чертеже приведена блок-схема устройства, позволяющего реализоват предлагаемый способ.
Устройство содержит триб 1 с насаженным на него колесом 2, центры 3 и 4, шкив 5, щуп 6, датчик 7, усилитель 8, блок 9 задания точное ти правки, пусковое устройство 10, блок 11 формирования величины энергии удара, блок 12 определения момента удара, блок 13 выдачи команд, ударный механизм 14 и жестко связанный с последним молоточек 15,
При этом триб 1 с колесом 2 установлен в центрах 3 и А, центр 4 жестко связан со шкивом 5, получаю- щчм вращение от двигателя (не показан). Щуп 6, касаясь обода колеса 2 передает колебания подвижной части датчика 7, сигналы с выхода которог через усилитель 8 поступают на входы блока 9 задания точности правки, блока 11 формирования величины энергии удара и блока 12 определения момента удара. Сигналы с выхода пускового устройства 10 поступают на вход блока 11 формирования величины энергии и вход блока 13 выдачи командJ, два других входа которого связаны соответственно с выходом блока 11 формирования величины энергии удара и выходом блока 12 определения момента удара, а выход блока 13 выдачи команд подключен к выходу ударного механизма 14, подвижная часть которого жестко связана с молоточком 15 о
Ось Z перпендикулярна оси X, совпадающей с осью триба о Ось Y перпендикулярна плоскости XOZ и лежит в плоскости колеса 2о Плоскость колес 2 повернута относительно оси Y и составляет с осью Z угол ср , которы определяет величину плоскостного биения колеса 2„
Процесс правки плоскостного биения вращающихся тел осуществляется следующим образом.
650422
Предварительно установленному в центрах 3 и 4 трибу 1 с колесом 2 непрерывно через шкив 5 передается
с вращение от двигателя (не показан), При наличии плоскостного биения колеса 2 jsjyn 6, жестко связанный с подвижной частью датчика 7, совершает колебательное движение, амплитуда
10 которого равна величине плоскостного биения, что позволяет указанному датчику вырабатывать пропорциональный величине плоскостного биения сигнал, который после усиления в усилителе
If 8 поступает на вход блока 9 задания точности правки, вход блока 11 формирования величины энергии удара и вход блока 12 определения-момента удара о
20 Если амплитуда биений колеса 2 больше допустимой, блок 9 задания точности правки дает команду Разрешение правки в пусковое устройство 10, которое выдаст команду в
25 блок 13 выдачи команд, назначение которого - выдача в ударный механизм 14 различной по величине электрической энергии в соответствии с сигналом, сформированным в блоке 11
30 формирования величины энергии удара.
В случае поступления команды Разрешение правки из пускового устройства 10 в указанный блок 11 последний формирует сигнал, пропорциональный фиксированному значению энергии первоначального удара, которое для данного типа колеса является величиной постоянной
4Q В случае, если после выполнения первоначального удара молоточком 15 по колесу 2 с указанным фиксированным значением энергии Е, биение исправляемого колеса продолжает вьш1ать допустимое значение, то блок I1 формирования величины энергии удара вьщает сигнал, пропорциональный энергии, необходимой для нанесения окончательного удара, который
gQ вычисляется по формуле
V, Е Е)
q-o-tf,
где Cfc, и ef, - величины плоскостного gg биения до нанесения и после нанесения первого удара молоточком с фиксированным значением энергии Е удара, которая для данного типа колеса является постоянной величиной.
35
3,
Н случае, если после нанесения второго удара молоточком 15 по исщГав- ляемому колесу 2 величина плоскостного биения последнего станет меньше допустимой, его направляют в бункер годных и приступают к правке очередного колеса.
Формула изобретения
Способ автоматизированной правки плоскостного биения вращающихся тел, преимущественно часовых колес, заключающийся в том, что измеряют величину плоскостного биения исправляемого колеса, наносят в месте наибольшего биения первый удар молоточком по колесу с фиксированным начапь650424
ным значением энергии удара, дополнительный удар, измеряют величину плоскостного биения после каждого удара, отличающийся тем, что, с. целью повышения производительности процесса правки за счет сокращения числа ударов, второй дополнительный удар наносят со значением Q энергии, определяемой по формуле
Е Е - ---; .,
где Е, - значение энергии удара; 15 ЕО значение энергии первого
удара;
Ч( значение плоскостного биения до и после нанесения первого удара.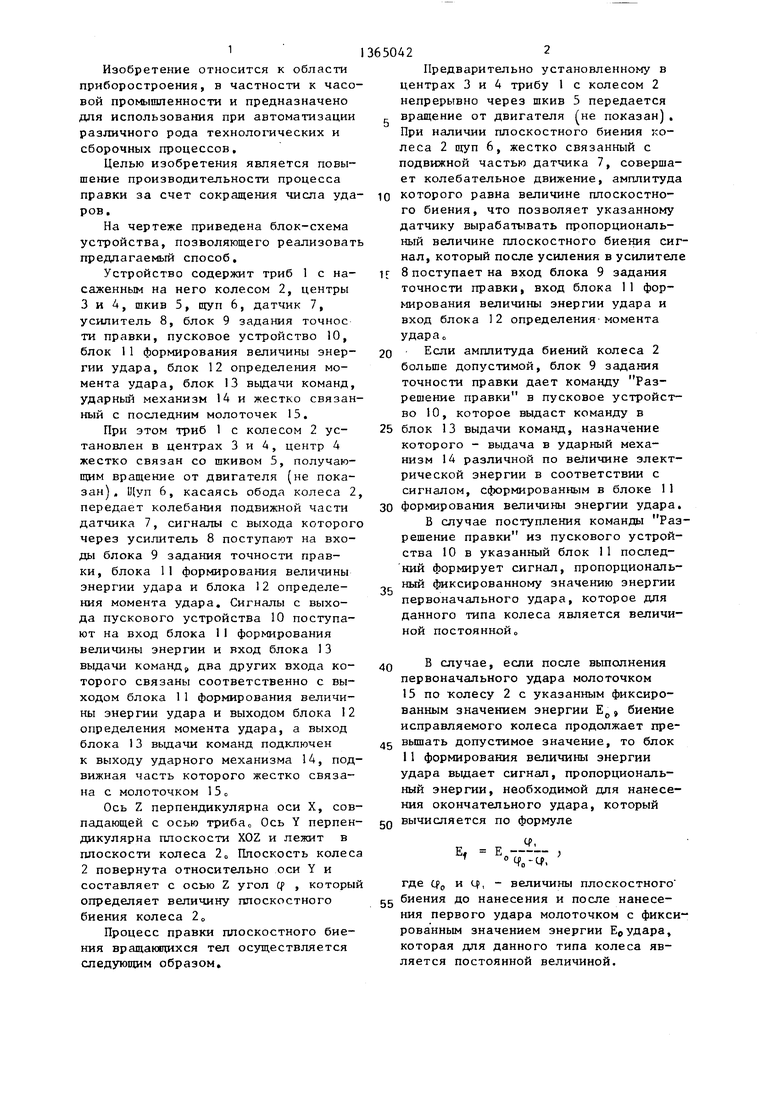
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированной правки плоскостного биения часовых колес | 1982 |
|
SU1413594A1 |
| Устройство для правки и контроля колес | 1976 |
|
SU605196A1 |
| Устройство для правки колес | 1975 |
|
SU534734A1 |
| Устройство для правки и контроля вращающихся тел, например, часовых колес | 1977 |
|
SU684498A2 |
| Прибор для правки часовых колес | 1956 |
|
SU113331A1 |
| УСТРОЙСТВО ДЛЯ ПРАВКИ ЧАСОВЫХ КОЛЕС | 1966 |
|
SU214398A1 |
| СПОСОБ И УСТРОЙСТВО ТАКТИЛЬНОЙ ИНДИКАЦИИ ТЕКУЩЕГО ВРЕМЕНИ В ЧАСАХ И ЧАСЫ С ТАКТИЛЬНОЙ ИНДИКАЦИЕЙ ТЕКУЩЕГО ВРЕМЕНИ | 2013 |
|
RU2526502C1 |
| СИГНАЛЬНОЕ УСТРОЙСТВО С ВОЗМОЖНОСТЬЮ ЕГО УСТАНОВКИ НА 30 ДНЕЙ ВПЕРЕД | 2011 |
|
RU2565326C2 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ШТРИХОВЫХ КОДОВ НА БУМАЖНЫЙ НОСИТЕЛЬ | 1992 |
|
RU2074418C1 |
| МЕХАНИЗМ С ХРОНОГРАФОМ И РЕПЕТИРОМ С ПРЕДОХРАНИТЕЛЬНОЙ ФУНКЦИЕЙ | 2018 |
|
RU2775147C2 |
Изобретение относится к часовой промышленности. Цель изобретения - повьшение производительности процесса правки колес часовых механизмов. Если амплитуда биения колеса 2 больше допустимой, блок 9 задания точности правки дает команду Разрешение правки в пусковое устройство 10, которое вьщает команду в блок 13 выдачи команд, назначение которого - выдача в ударный механизм 14 различной по величине злектрической энергии в соответствии .с сигналом, сформированным в блоке 11 формирования величины знергии удара. Цель изобретения достигается путем минимизации числа ударов, необходимых для устранения плоскостного биения, так как сокращение числа ударов ведет к уменьшению времени правки. 1 ил.
| Устройство для правки и контроля вращающихся тел, например, часовых колес | 1977 |
|
SU684498A2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
