Известны устройства для программного управления станками по чертежу с помощью фотоэлектрической системы управления. Однако чувствительность таких устройств недостаточна.
В описываемом устройстве для повышения чувствительности системы управления применена фотокопировальная головка, выполненная в виде двух фотозизоров со светочувствительными элементами, которые закрыты диафрагмами. Эти диафрагмы проектируются оптической системой по обе стороны копировальной линии чертежа в форме двух трейсеров так, чтобы пр:и пересечении копировальной линии перпендикулярными к ней прямыми или при нормальном слежении вдоль линии освещенность светочувствительных элементов поддерживалась одинаковой. Для отработки дополнительных команд, нанесенных на копировальную линию в виде определенного числа перпендикулярных к ней штрихов, в устройстве применен счетчик импульсов, который выдает управляющий импульс, например, для поворота револьверной головки с инструментами в зависимости от числа затемнений обоих светочувствительных эле ентов при прохождении трейсеров через штрихи. Для повышения точности обработки при.менен связанный с ходовым зинтом поперечной подачи станка делительный диск, в пазы которого по команде с чертежа входит фиксатор, останавливающий ходовой винт в положениях, соответствующих заданным размерам обрабатываемой детали.
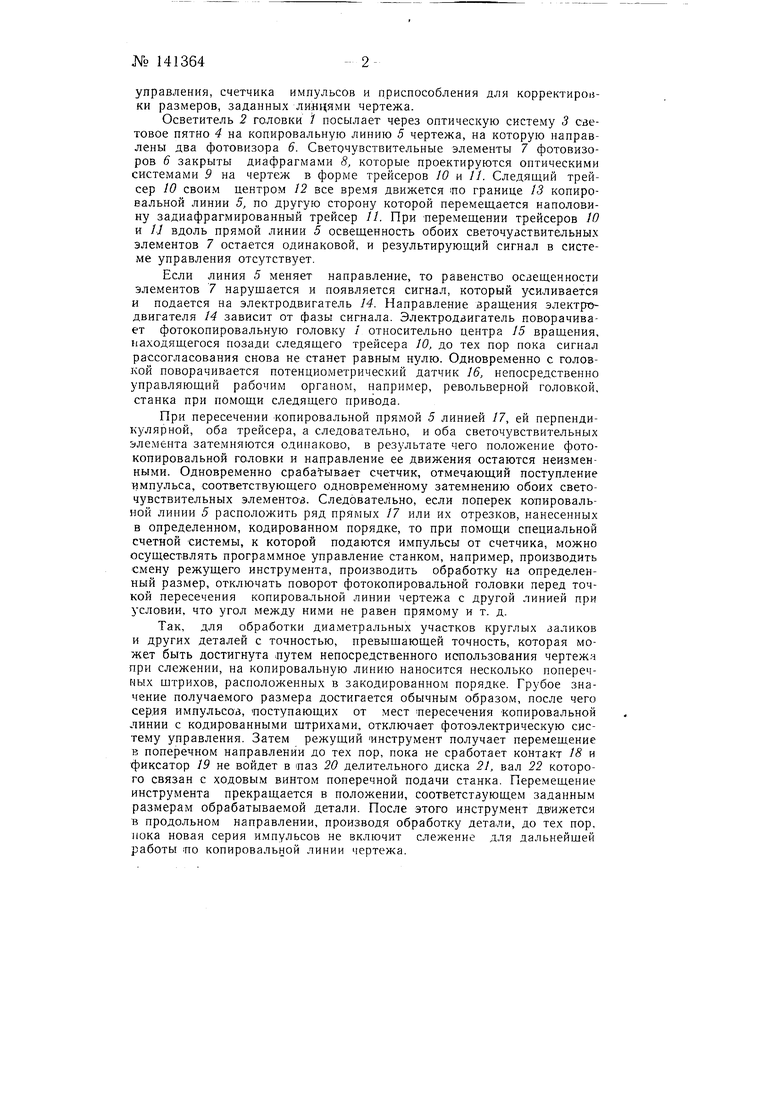
На фиг. 1 изображена фотокопировальная головка; на фиг. 2- схема слежения здоль копировальной линии; на фиг. 3 - схема слежения при пересечении копировальной линии перпендикулярной к ней линией; на фиг. 4 - делительный диск с фиксатором.
Устройство для программного управления станками по чертежу состоит из фотокопировальной головки /, фотоэлектрической системы
№ 141364 2управления, счетчика импульсов и приспособления для корректироики размеров, заданных ли«цями чертежа.
Осветитель 2 головки 1 посылает через оптическую систему 5 световое пятно 4 на копировальную линию 5 чертежа, на которую направлены два фотовизора 6. Светочувствительные элементы 7 фотовизоров 6 закрыты диафрагмами 8, которые проектируются оптическими системами 9 на чертеж в форме трейсеров 10 и //. Следящий трейсер 10 своим центром 12 все время движется по границе 13 копировальной линии 5, по другую сторону которой перемещается наполовину задиафрагмированный трейсер 11. При перемещении трейсеров 10 и 11 вдоль прямой линии 5 освещенность обоих светочувствительных элементов 7 остается одинаковой, и результирующий сигнал в системе управления отсутствует.
Если линия 5 меняет направление, то равенство освещенности элементов 7 нарушается и появляется сигнал, который усиливается и подается на электродвигатель 14. Направление вращения электрт двигателя 14 зависит от фазы сигнала. Электродвигатель поворачивает фотокопировальную головку / относительно центра 15 вращения, находящегося позади следящего трейсера 10, до тех пор пока сигнал рассогласования снова не станет равным нулю. Одновременно с головкой поворачивается потенциометрический датчик 16, непосредственно управляющий рабочим органом, например, револьверной головкой, станка при помощи следящего привода.
При пересечении Копировальной прямой 5 линией 17, ей перпендикулярной, оба трейсера, а следовательно, и оба светочувствительных элемента затемняются одинаково, в результате чего положение фотокопировальной головки и направление ее движения остаются неизменными. Одновременно срабатывает счетчик, отмечающий поступление импульса, соответствующего одновременному затемнению обоих светочувствительных элементоВ. Следовательно, если поперек копировальной линии 5 расположить ряд прямых 17 или их отрезков, нанесенных в определенном, кодированном порядке, то при помощи специальной счетной системы, к которой подаются импульсы от счетчика, можно осуществлять программное управление станком, например, производить смену режущего инструмента, производить обработку на определенный размер, отключать поворот фотокопировальной головки перед точкой пересечения копировальной линии чертежа с другой линией при Зсловии, что угол между ними не равен прямому и т. д.
Так, для обработки диаметральных участков круглых за.тиков и других деталей с точностью, превышающей точность, которая может быть достигнута путем непосредственного использования чертежа при слежении, на копировальную линию наносится несколько поперечных штрихов, расположенных в закодированном порядке. Грубое значение получаемого размера достигается обычным образом, после чего сер.ия импульсов, поступающих от мест пересечения Копировальной линии с кодированными штрихами, отключает фотоэлектрическую систему управления. Затем режущий инструмент получает перемещение в поперечном направлении до тех пор, пока не сработает контакт 18 и фиксатор 19 не войдет в паз 20 делительного диска 21, вал 22 которого связан с ходовым винтом поперечной подачи станка. Перемещение инструмента прекращается в положении, соответствующем заданным размерам обрабатываемой детали. После этого инструмент движется в продольном направлении, производя обработку детали, до тех пор, пока новая серия импульсов не включит слежение для дальнейщей работы :по копировальной линии чертежа.
Описываемое устройство позволяет автоматизировать работу металлорежущих станков, увеличить производительность и улучпгить качество обработки деталей.
Предмет изобретения
1.Устройство для программното управления станками по чертежу с помощью фотоэлектрической системы управления, отличающееся тем, что, с целью повышения чувствительности системы управления, в нем применена фотокопировальная головка, выполненная в виде двух фотовизоров со светочувствительными элементами, которые закрыты диафрагмами, проектирующимися оптической системой по обе стороны, копировальной линии чертежа в форме двух трейсеров так, чтобы при пересечении копировальной линии перпендикулярными к ней прямыми или при нормальном слежении вдоль линии освещенность светочувствительных элементов поддерживалась одинаковой.
2.Устройство по п. 1, отличающееся тем, что, с целью отработки дополнительных команд, нанесенных на копировальную линию
в виде определенного числа перпендикулярных к ней щтрихов, в нем применен счетчик импульсов, который выдает управляющий импульс, например, для поворота револьверной головки с инструментами в зависимости от числа затемнений обоих светочувствительных элементов при прохождении трейсеров через штрихи.
3.Устройство по пп. 1 и 2, отличающееся тем, что, с целью повыщения точности обработки, в нем применен связанный с ходовым винтом поперечной подачи станка делительный диск, в пазы которого по команде с чертежа входит фиксатор, останавливающий ходовой винт в положениях, соответствующих заданным размерам обрабатываемой детали.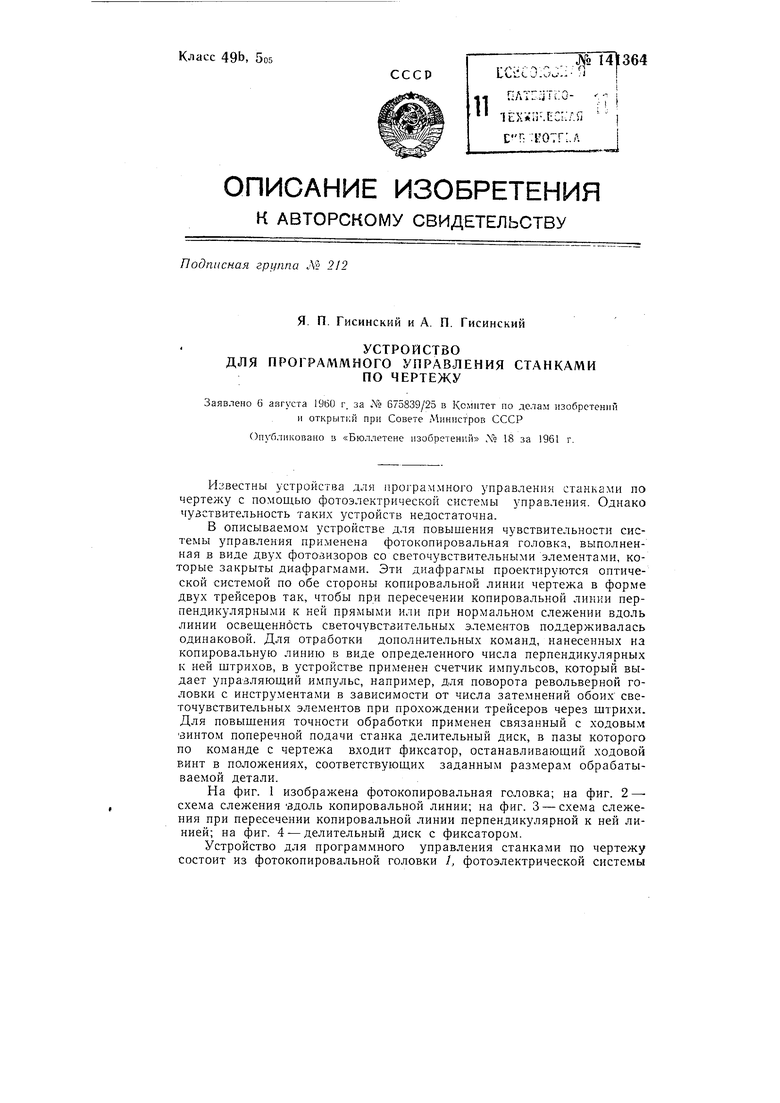

| название | год | авторы | номер документа |
|---|---|---|---|
| Фотокопировальный станок для фрезеровки плазовых шаблонов | 1956 |
|
SU115718A1 |
| Фотоэлектрическая копировальная система | 1960 |
|
SU137378A1 |
| Масштабно-дистанционная фотокопировальная система | 1955 |
|
SU121164A1 |
| Способ преобразования обычной нотной записи музыкальных произведений в запись по методу интенсивности | 1946 |
|
SU74639A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ ФОТОКОПИРОВАЛЬНОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 1967 |
|
SU222763A1 |
| Способ фотокопировальной обработки и устройство для его осуществления | 1979 |
|
SU770751A1 |
| Сканирующая головка для фотокопировальных механизмов | 1977 |
|
SU627945A1 |
| Устройство для копирования смежныхКОНТуРОВ | 1978 |
|
SU795787A1 |
| Способ определения радиусов кривизны сферических поверхностей и устройство для его осуществления | 1988 |
|
SU1562691A1 |
| Фотокопировальное следящее устройство | 1977 |
|
SU763062A1 |
.l
13 4 12
Ю 15
Фаг.З
21
(ригЛ
