32
{5
ч
S
(Л
|
элементы с упранляю1пими ЦРПКМИ, HKJIKI- ченные между дат П кпми 17 и 18 я ре- гyлятopa fи 13 и 14 скорости двигателей 1 и 2, блок 33 контроля опускания кареток при отключенных двигателях, два входа которого соединены с входом задатчика 21 интенсивности и выходом одного из датчиков скорости, а выход связан с управляющими цепями коммута1Д1онных элементов,блок 34 контроля насыщения регуляторов скорости, входы которого соединены
с входами и выходами регуляторов скорости, а выход - с входом задат- чика 21 интенсивности, а также блок 35 прямого контроля перекоса кареток Входные датчики путевых импульсов блока 35 кинематически связаны с каретками, а выходы соединены с цепями аварийного отключения аппаратов за- Вд1ты силовых вентильных преобразователей и через реле с входными резисторами регуляторов скорости, 1 з,п, ф-лы, 4 ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом кристаллизатора установки непрерывной разливки металла | 1971 |
|
SU442885A1 |
| Устройство для управления аккумуля-TOPOM пОлОСы | 1979 |
|
SU814499A1 |
| Пресс для гибки заготовок с растяжением | 1982 |
|
SU1107927A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |
| Электропривод нажимных винтов прокатной клети | 1971 |
|
SU492027A1 |
| Устройство для обнаружения и коррекции гнутой трубы телескопа | 1980 |
|
SU970295A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ РАСПРЕДЕЛИТЕЛЯ ШИХТЫ ДОМЕННОЙ ПЕЧИ | 1998 |
|
RU2126056C1 |
| Устройство для размотки рулонного материала | 1979 |
|
SU903267A1 |
| Эксцентриковый электропривод | 1978 |
|
SU769693A1 |


Изобретение относится к черной металлургии - к машинам вертикального типа для отливки сверхшироких слитков. Оно позволяет повысить надежность работы МНЛЗ благодаря по вышению точности синхронизации дви гателей, своевременной фиксации неисправностей и предупреждению аварий. Устройство содержит коммутационные
1
Изобретение относится к черной металлургии, а именно к машинам непрерывного литья заготовок вертикальног типа для отливки сверхшироких слитKQB .
Цель изобретения - предотвращение аварийных ситуаций за счет повышения точности синхронизации движения приемных кареток.
На фиг. 1 представлена структурна схема устройства для приема слябов машины непр орывного литья заготовок; на фиг. 2 - структурная схема блок; контроля перекоса приемных кареток; на фиг, 3 - структурная схема блока контроля опускания приемных кареток; на фиг. 4 - структурная схема блока контроля насыщения регуляторов скорости.
Устройство для приема слябов машины непрерывного литья заготовок содержит (фиг, 1) дча электродвигателя 1 и 2, две лебедки 3 н 4, две каретки 5 и 6, две наорав- ляющие 7 и 8, два ctijioBMx вентильных преобразователя 9 и 10с аппаратами 11 и 12 защиты, два регулятора 13 и 14 скорости, два регулятора 15 и 16, тока, два датчика 17 и 18 скороспт электродвигате1 ей. два датчика 19 и 20 тока, задатчик 21 и;1тенснБ} ости, два нормально разомкнутых контакта 22 и 23 реле направления движения кареток, два задающих потенпиометра 24 и 25, два сельсина 26 и 27, фазо- чувствительньй выпрямитель 28, квад- ратичньй преобразователь 29, инвертор 30,два полевых транзистора 31 и
32, блок 33 контроля опускания приемных кареток, блок 34 контроля насьпце- ния регуляторов скорости, блок 35 контроля перекоса приемных кареток, две пары нормально разомкнутых и нормальн-о заг кнутых контактов 36-39 и две пары входных резисторов 40-43 регуляторов 13 и 14 скорости.
При этом каждый из электродвигателей 1 и 2 кинематически соеданен с соответствующими лебедками 3 и 4 приемных кареток 5 и 6, каждая из лебедок 3 и 4 кинематически соединена с соответствующ11ми сельсинами 26 и 27, Приемные каретки 5 и 6 установлены с возможностью перемещения по направляющим 7 и 8. Входы каждого из силовых вентильных преобразователей 9 и 10 соединены с выходами соответствующих регуляторов 15 и 16 тока с датчиками 19 и 20 тока в цепях обратной связи, входы регуляторов 15 и 16 тока соединены с выходами регуляторов 13 и 14 скорости электродвигателей, входы которых соединены с выходами соответствующих датчиков 17 и 18 скорости электродвигателей, другие входы регуляторов 15 и 16 тока соединены с выходами квадратичного преобразователя 29, причем регулятора 15 тока - непосредственно, а другого - через инвертор 30, вход квадратичного преобразователя 29 соединен с выходом фазо- чувствительного вьшрямителя 28, вход которого соединен с выходом сельсина 27. Входы задатчика 21 интенсивности соединены через нормально разомкнутые контакты 22 и 23 реле направл ния дви31А14497
жения кареток с выходами заданндихют выход блока 35 контроля перекоса
потенциометров 24 и 25, с каждыь изприемных кареток,
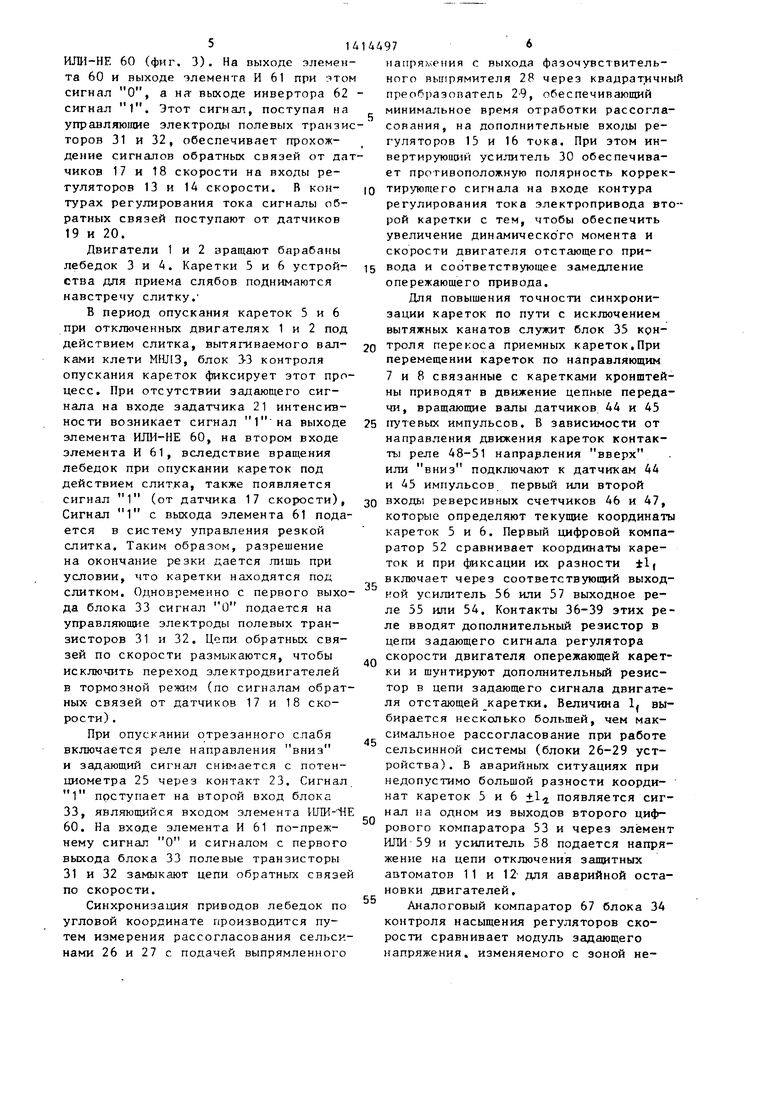
входных резисторов 40-43 регуляторов Блок 33 контроля опускания кареток 13 и 14 скорости параллельно соедине-(фиг. 3) содержит элемент ИЛИ-НЕ 60, ны нормально разомкнутые и нормальновходы которого соединены с выходами замкнутые контакты 36-39. Выходы по-задатчика 21 интенсивности и являются левых транзисторов 31 и 32 соединеныпервым и вторым входами блока 33 конт- с входами соответстзуюгцих регулято-роля опускания кареток, а выход сое- ров 13 и 14 скорости, а входы - с вы- юдинен с первым входом элемента И 61, ходами соответствующих датчиков 17 ивыход которого соединен с входом 18 скорости электродвигателей и вы-вертора 62 и является одновременно., ходом блока 33 контроля опусканиявторым выходом блока 33 контроля опус- приемных кареток, входы которого сое-кания кареток,соединенным с входом динены с входами задатчика 21 интен- gсистемы управления резкой слитка, пер- сивности и выходом датчика 17 скорое-вым выходом которого является выход ти электродвигателя, а другой выход -инвертора 62, соединенный с входами с входом системы управления резкойполевых транзисторов 31 и 32, а треть- слитка. Выход блока 34 контро/1я насы-им входом - второй вход элемента И 61, щения регуляторов скорости соединен с 2Qсоединенный с выходом датчика 17 ско- выходом задатчика 21 интенсивности,рости. первый вход блока 34 контроля насыщения регуляторов скорости через нор- Блок 34 контроля насыщения регут мально разомкнутые и нормально зам- .ляторов скорости (фиг. 4) содержит кнутые контакты 36, 39 и 38, 37 с па- 25элементы 63 и 63 зоны нечувствителб- раллельно соединенными входными ре-нести, выходы которых соединены со- зисторами 40, 43 и 42, 41 регуляторовответственно с входами блоков 64 и 66 скорости соединен с входами регулято-выделения модуля, выходы которых сое- ров 13 и 14 скорости и выходом задат-динены с входами компаратора 67, вы- чика 21 интенсивности, а второй и -jo которого, соединенный с входом третий входы - с выходами соответст-задатчика 21 интенсивности, является вующих регуляторов 13 и 14 скорости.выходом блока 34 контроля насыщения Выход блока 35 контроля перекоса при-регуляторов скорости, nepBifW, вторым емных кареток соединен с цепями ава-и третьим входами которого являются рийного отключения аппаратов 11 и 12входы элементов 63 и 65 зоны нечув- защиты, а входы кинематически соеди-ствительности, соединенные, соответ- нены с приемными каретками 5 и 6.ственно, с входами задатчика 21 инКпок 35 контроля перекоса приемныхтенсивности и регуляторов 13 и 14
кареток (фиг. 2) содержит два датчикаскорости.
44 и 45 путевых импульсов, два ревер- . Устройство работает следующим обсивных счетчика 46 и 47, четыре кон-разом.
такта 48-51 реле направления движения При команде на подъем кареток к приемных кареток, два цифровых компа-слитку напряжение с задающего потен- ратора 52 и 53, два реле 54 и 55, трициометра 24 через контакт 22 реле, на- усилителя 56-68 и элемент ИЛИ 59.Приправления вверх подается на вход этом каждый из датчиков 44 и 45 путе-задатчика 2Г интенсивности. На входах вых импульсов кинематически соединенырегуляторов 13 и 14 скорости плавно с приемными каретками 5 и 6, выходыувеличивается задающее напряжение. датчиков 44 и 45 путевых {ц пульсовС выходов регуляторов 13 и 14 скорос- через нормально разомкнутые контактыти поступает задающее напряжение на 48, 49 и 50, 51 реле направления дви-входы регуляторов 15 и 16 тока, жения приемных кареток соединены с Системы фазового управления уст.а- входами СООТВСТСТВУЮ1ЦИХ реверсивных навливают углы отпирания вентилей ти счетчиков 46 и /+7, выходы которых сое-ристорных преобразователей 9 и 10, динены с входами цифровых компарато-соответствующие заданной угловой око- ров, выходы первого из которых сое-рости двигателей 1 и 2. С потенцио- динены через усилители 56 и 57 с ре-метра 24 сигнал 1 поступает«на перле 55 и 54, а выходы второго черезвый вход блока 33 контроля опускания элемент ИЛИ 59 и усилитель 58 образу-кареток, являющийся входом элемента .
5U
ИЛИ-НЕ 60 (фиг. 3). На выходе элемента 60 и выходе элемента И 61 при этом сигнал О, а ня выходе инвертора 62 сигнал 1. Этот сигнал, поступая на управляющие электроды полевых транзисторов 31 и 32, обеспечивает прохождение сигналов обратных связей от датчиков 17 и 18 скорости на входы регуляторов 13 и 14 скорости. В контурах регулирования тока сигналы обратных связей поступают от датчиков 19 и 20.
Двигатели 1 и 2 вращают барабаны лебедок 3 и 4. Каретки 5 и 6 устройства для приема слябов поднимаются навстречу слитку.
В период опускания кареток 5 и 6 при отключенных двигателях 1 и 2 под действием слитка, вытягиваемого вап- ками клети МНЛЗ, блок 3-3 контроля опускания кареток фиксирует этот процесс. При отсутствии задающего сигнала на входе эадатчика 21 интенсивности возникает сигнал выходе элемента ИЛИ-НЕ 60, на втором входе элемента И 61, вследствие вращения лебедок при опускании кареток под действием слитка, также появляется сигнал 1 (от датчика 17 скорости). Сигнал 1 с выхода элемента 61 подается в систему управления резкой слитка. Таким образом, разрешение на окончание резки дается лишь при условии, что каретки находятся под слитком. Одновременно с первого выхода блока 33 сигнал О подается на управляющие электроды полевых транзисторов 31 и 32. Цепи обратных связей по скорости размыкаются, чтобы исключить переход электродвигателей в тормозной режим (по сигналам обратных- связей от датчиков 17 и 18 скорости) .
При опускании отрезанного слабя включается рале направления вниз и задающий сигнал снимается с потенциометра 25 через контакт 23. Сигнал 1 поступает на второй вход блока 33, являющийся входом элемента ИЛИ- ИЕ 60. На входе элемента И 61 по-прежнему сигнал О и сигналом с первого выхода блока 33 полевые транзисторы 31 и 32 замыкают цепи обратных связей по скорости.
Синхронизация приводов лебедок по угловой координате производится путем измерения рассогласования сельсинами 26 и 27 с подачей выпрямленного
44976
напряжения с выхода фазочувствитель- ного выпрямителя 28 через квадратичный преобразователь 2-9, обеспечивающий минимальное время отработки рассогласования, на дополнительные входы регуляторов 15 и 16 тока. При этом инвертирующий усилитель 30 обеспечивает противоположную полярность коррек0 тирующего сигнала на входе контура
регулирования тока электропривода второй каретки с тем, чтобы обеспечить увеличение динамическо го момента и скорости двигателя отстающего при5 вода и соответствующее замедление опережающего привода.
Для повышения точности синхронизации кареток по пути с исключением вытяжных канатов служит блок 35 крн0 троля перекоса приемных кареток.При перемещении кареток по направляющим 7 и 8 связанные с каретками кронштейны приводят в движение цепные передачи, вращающие валы датчиков 44 и 45
5 гтутевых импульсов. В зависимости от направления движения кареток контакты реле 48-51 напрарления вверх или вниз подключают к датчикам 44 и 45 импульсов первый или второй
0 входы реверсивных счетчиков 46 и 47, которые определяют текущие координаты кареток 5 и 6. Первый цифровой компаратор 52 сравнивает координаты кареток и при фиксации их разности ±1( включает через соответствующий выходкой усилитель 56 или 57 выходное реле 55 или 54. Контакты 36-39 этих реле вводят дополнительный резистор в цепи задающего сигнала регулятора скорости двигателя опережающей каретки и шунтируют дополнительный резистор в цепи задающего сигнала двигателя отстающей каретки. Величина 1 выбирается несколько большей, чем максимальное рассогласование при работе сельсинной системы (блоки 26-29 устройства) . В аварийных ситуациях при недопустимо большой разности координат кареток 5 и 6 +1 появляется сигнал на одном из выходов второго цифрового компаратора 53 и через элемент ИЛИ 59 и усилитель 58 подается напряжение на цепи отключения згицитных автоматов 11 и 12- для аварийной остановки двигателей.
Аналоговый компаратор 67 блока 34 контроля насыщения регуляторов скорости сравнивает модуль задающего напряжения, изменяемого с зоной не5
0
5
0
5
71
чувствительности (1елинейный элемент 63) блоком 64 выделения модуля, с модулями выходных напряжений регуляторов 1J и 14 скорости (определяют через нелинейный элемент 65,блок 66) Если из-за увеличенного трения в направляющих одной из кареток или других механических неисправностей темп разгона соответствующего двигателя ниже заданного,сигналом с выхода аналогового компаратора 67 автоматически снижается общий задающий сигнал н выходе задатчика 21 интенсивности.При аварийном падении скорости одного из двигателей аналогично снижается выходное напряжение задатчика 21 интенсивности. Благодаря исключению насыщения регуляторов скорости повышается также точность синхронизации по пути.
Формула изобретения
5
0
5
0
6
0
5
0
5
978
инвертор, вход квадратичного преоб- раз(жателя соединен с выходом фазо- чувствительного выпрямителя,вход которого соединен с выходом сельсина, нходы задятчика интенсивности соединены через нормально разомкнутые контакты реле направления движения кареток с выходами соответствующих задаю- ошх потенциометров, отличающееся тем, что, с целью предотвращения аварийных ситуаций за счет повышения точности синхронизации движения приемных кареток, в него введены два полевых транзистора, блок контроля опускания приемных кареток, блок контроля насыщения регуляторов скорости, блок контроля перекоса приемных кареток, две пары нормально разомкнутых и нормально замкнутых контактов и две пары входных резисторов регуляторов скорости, причем с каждым из них параллельно соединены нормально разомкнутые и нормально замкнутые контакты, выходы полевых транзисторов соединены с входами соответствующих регуляторов скорости, а входы - с выходами соответствующих датчиков скорости электродвигателей и выходом блока контроля опускания приемных кареток, входы которого соединены с входами задатчика интенсивности и выходом одного из датчиков скорости электродвигателя, а другой выход соединен с входом системы управления резкой слитка, выход блока контроля насыщения регуляторов скорости - с входом задатчика интенсивности, первый вход блока контроля насыщения регуляторов скорости через нормально разомкнутые и нормально замкнутые контакты с параллельно соединенными входными резисторами регуляторов скорости соединен с входами регуляторов скорости и выходом задатчика интенсивности, а второй и третий входы соединены с выходами соответствующих регуляторов скорости, выход блока контроля перекоса приемных кареток соединен с цепями аварийного отключения аппаратов защиты, а входы кинематически соединены с приемными каретками,
жения приемных кареток, два цифровых компаратора, два репе, три усилителя и элемент ИЛИ, причем каждый из датчи ков путевых импульсов кинематически соединен с приемными каретками.лыходы датчиков 1гутевык импульсов через нормально разомкнутые контакты направления движения приемных кареток сое1449710
дичены с входами состветствующих реверсивных счетчиков, выходы которых соединены с входами щфровых компараторов, выходы первого из которых сое- динены через усилители с реле, а выходы второго через элемент ИЛИ и усилитель образуют выход блока контроля пр-р -м оса приемных кареток.
К $жодам
и/г
зават ика, uwncHcuS- ffocmu 21
«
Фиг.З
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
