Изобретение относится к области металлургнческого электропривода и может быть использовано для управления ак- кумуляторами полосы горизонтального и . вертикального типов прокатных станов и агрегатов обработки и покрытий полосы в цехах холодной прокатки. Известно устройство реализующее способ регулирования линейной скорости стана холодной прокатки, в котором используется аккумулятор (накопитель) полосы горизонтального типа с подвижной кареткой (тележкой, несушей отклоняющи барабаны и создающей натяжения в полосе. Основное назначение устройства обеспечить необходимые скоростные режимы работы оборудования до и после аккумулятора в функции положения подвижной каретки (т.е. количества накопленной полосы) и их взаимное согласование l . Однако создание натяжения в полосе до начала ее движения, обеспечив ющие нормальные режимы работы оборуио вания после нетехкологичсских остановок СО сбросом натяжения, а также своевременное обнаружение обрьшов полосы и остановки Движения полосы с цепью локализации аварии не предусмотреньи Известна также система регулирования петлевой каретки, которая имеет два индивидуальных привода петлевых карегсж горизонтального аккумулятора. Система регулирования предусматривает слежение за синхронностью обоих приводов, компенсацию трения в механизмах и учет колебания канатов, корректировку натяжения в режимах ускорений и замедлений, а также контроль обрыва полосы с немедленным воздействием на остановку всего агрегата 2. Однако и здесь вопросы создания предварительного натяжения До пуска агрегата не рещены. При этом, обрьш полосы и отсутствие натяжения в полосе из-за наличия слабины для системы эквиваленты и существует сигнал, запрещающий пуск установки. Создание натяжения в полосе в этих условиях должно решаться какими-го вспомогательными путями,
Нанбопее близким к предлагаемому по технической сущности и достигаемому результату является устройство для управления аккумулятором стальной полосы, содержит систему регулирования тока якоря двигателя постоянного тока, привода каретки петлеаккумулятфа и систему регулирования скорости входной тянущей станции. Система регулирования привода каретки содержит контур регулирования тока (соответственно, натяжения в полосе), на вход которого подается сигнал зада- . ния тока, а также корректирующие сиг- налы, учитывающие трение в механизме и динамическую составляющую тока при ускорениях каретки. Выходной сигнал регулятора тока ограничивается по уровню для двигательного режима работы привода. Система регулирования скорости входной тянущей станции имеет в качестве задания помимо основного сигнала задания скорости, соответствующего скорости всего агрегата, дополнительный сигнал, обеспечивающий коррекцию скорости в функции положения каретки аккумулятора в рабочей зоне (заполнанньи аккумулятор) 3.
Недостатком данного устройства является отсутствие -контроля за обрывом полосы и невозможность нормалького выбора слабины полосы перед началом работы агрегата.
Действительно, по технологическим требованиям агрегат должен запускаться после установления в полосе заданного натяжения, соответствующего сортаменту материала. Включение системы регулирования тока в работу с заданной уставкой на входе приведет к разгону двигателя и каретки аккумулятора до скфости, соответствующей величине ограничения вькодного сигнала регулятс за тока, поскольку сигнал обратной связи по току до упора каретки в полосу отсутствует (не считая тока потерь, котор.ые компенсируютс сигналом с релейного усилителя). Таким образом, происходит удар каретки в полосу в момент окончания выбора слабины на больщой сксчэости, так как скорость, соответствукядая уровню ограничения,дол- жна быть, выше максимапьно возможной рабочей скорости каретки. Эта скорость определяется максимальной разностью между скоростями входной и выходной частей агрегата в режиме заполнения аккумулятфа полосой и является достаточно высокой. Такой удар в полосу недопустим
как ДЛЯ электродвигателя, так и для механооборудования.
При обрыве полосы в аккумуляторе исчезает нагрузка на двигателе, и соответственно, обратная связь по току якоря двигателя. Как и в предыдущем случае, каретка аккумулятора интенсивно разгоняется до уровня ограничения, Обрьш полосы системой не фиксируется, каретка продолжает двигаться вплоть до удара в
ограничительные конструкции, агрегат продолжает транспортировать полосу - все это ведет к развитию аварии.
Цель изобретения - повышение качества регулирования, предупреждение ударов каретки в полосу при выборе слабины, повышение быстродействия и точности контроля обрывов полосы.
Поставленная цель достигается тем, что устройство, содержащее электроприрод перемещения каретки петлеаккумуля- тора включающий в себя электродвигатель питающий его тиристорный преобразовател блок регулирования тока яксря двигателя, узел компенсации потерь в механизме; электропривод входной тянущей станции с блоком регулирования скорости двигателя и узлом коррекции скорости по положению каретки петлеаккумулятора по сигналу
сельсина-датчика, установленного на барабане каретки, дополнительно содержит блок регулирования скорости каретки пет- леаккумулятора, содержащий задатчик, датчик тока, датчик скорости и управляющий блоком регулирования тока, триггер два реле, первый «слоговый элемент контроля тока двигателя каретки, второй пороговый элемент кситроля скорости перемещения каретки, третий пороговьй элемент контроля разности заданной и фактической скоростей каретки, инвертор и два клапана И, причем выход первого порогового элемента соединен с одним входом первого клапана И, выход второго через ин вертср соединен с другим входом первого клапана И, вькод которого подключен к триггеру, соединенному с первым реле разрешения вращения двигателей входной и выходной тянущих станций, вькод третьего порогового элемента подключен ко входу второго клапана И, другой вход которого соединен с выходом триггера, а выход со втсрым реле кошроля обрыва полосы и остановки двигателей тянущих станции и каретки петлеаккумлятора, входы nqporoBbix элементов соединены с соответствующими задатчиками.
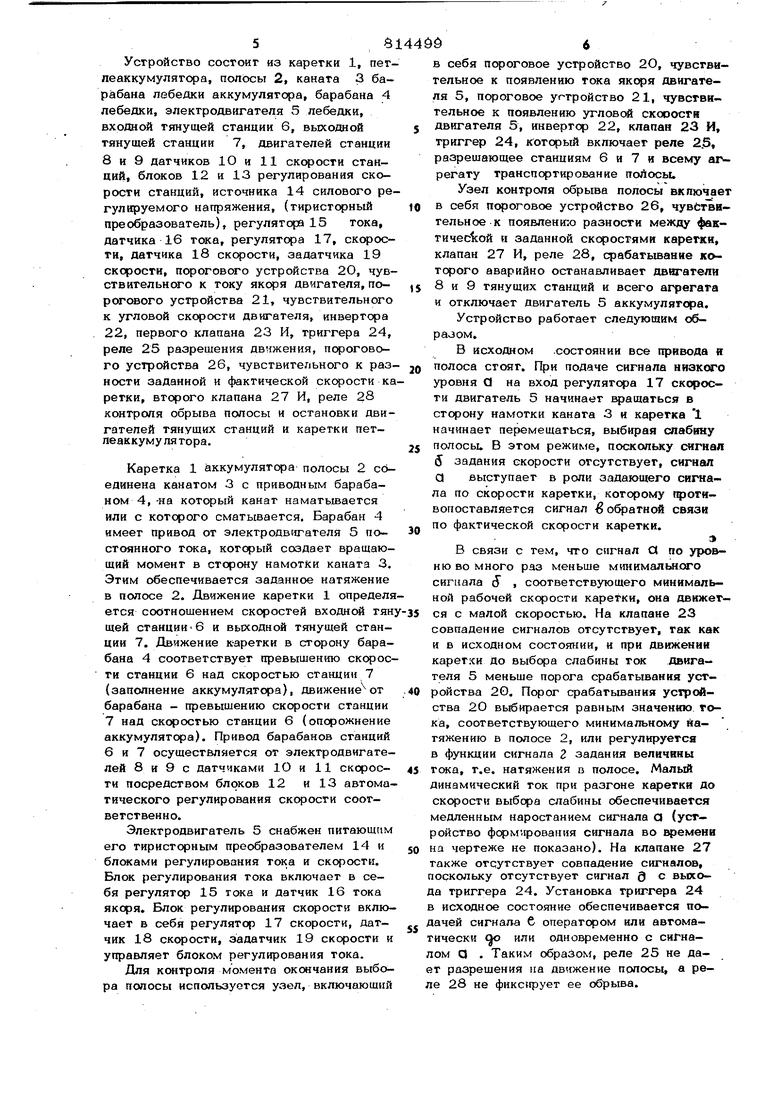
На чертеже приведена схема устройства. Устройство состоит из каретки 1, петпеаккумулятора, полосы 2, каната 3 барабана лебедки аккумулятора, барабана 4 лебедки, электродвигателя 5 лебедки, входной тянущей станции 6, вькодной тянущей станции 7, двигателей станции 8 и 9 датчиков 1О и 11 сксрости станций, блоков 12 и 13 регулирования скорости станций, источника 14 силового ре гулируемого напряжения, (тиристорный преобразователь), регулятора 15 тока, датчика 16 тока, регулятора 17, скс эости, датчика 18 скорости, задатчика 19 скорости, порогового устройства 20, чувствительного к току якоря двигателя, порогового устройства 21, чувствительного к угловой скорости двигателя, инвертора 22, первого клапана 23 И, триггера 24, реле 25 разрешения движения, порогового устройства 26, чувствительного к разности заданной и фактической скорости ка ретки, второго клапана 27 И, реле 28 контроля обрыва полосы и остановки двигателей тянущих станций и каретки петпеаккуму пя тора. Каретка 1 аккумулятора полосы 2 соединена канатом 3 с приводным барабаном 4,-на который канат наматывается или с которого сматьшается. Барабан 4 имеет привод от электродв 1гателя 5 постоянного тока, который создает вращающий момент в сторону намотки каната 3. Этим обеспечивается заданное натяжение в полосе 2. Движение каретки 1 определя ется соотношением скоростей входнс тян щей станции6 и выходной тянущей станции 7. Движение каретки в сторону барабана 4 соответствует превышению скорости станции 6 над скоростью станции 7 (заполнение аккумулятора), движение от барабана - превышению скорости станции 7 над скоростью станции 6 (опорожнение аккумулятора). Привод барабанов станций 6 и 7 осуществляется от электродвигателей 8 и 9 с датчиками Ю и 11 скорости посредством блоков 12 и 13 автоматического регулирования скорости соответственно. Электродвигатель 5 снабжен питающим его тиристорным преобразователем 14 и блоками регулирования тока и скорости. Блок регулирования тока включает в себя регулятор 15 тока и датчик 16 тока якоря. Блок регулирования скорости включает в себя регулятор 17 скорости, датчик 18 , задатчик 19 скорости и управляет блоком регулирования тока. Для контроля момента окончания выбора полосы используется узел, включающий в себя пороговое устройство 2О, чувствительное к появлению тока якоря двигателя 5, пороговое устройство 21, чувствительное к появлению угловсй скорости двигателя 5, инвертор 22, клапан 23 И, триггер 24, который включает реле 2.5, разрешающее станциям б и 7 и всему aiv. регату транспортирование полосы. Узел контроля обрыва полосы включает в себя пороговое устройство 26, чувбтЪительное к появлению разности между фактичес1сой « заданной скоростями каретки, клапан 27 И, реле 28, срабатьюание которого аварийно останавливает двигатели 8 и 9 тянущих станций и всего агрегата и отключает двигатель 5 аккумулятора. Устройство работает следующим образом. В исходном .состоянии все привода и полоса стоят. При подаче сигнала низкого уровня а на вход регулятора 17 скорости двигатель 5 начинает вращаться в сторону намотки каната 3 и каретка 1 начинает перемещаться, выбирая слабину полосы. В этом , поскольку сигнал S задания скорости отсутствует, сигнал а выступает в роли задающего сигнала по скорости каретки, которому противопоставляется сигнал Sобратной связи по фактической скорости каретки. в связи с тем, что сигнал Ct по уровню во много раз меньше минимальдсго сигнала S , соответствующего минимальной рабочей скорости каретки, она движется с малой скоростью. На клапане 23 совпадение сигналов отсутствует, так как и в исходном состоянии, и при движении каретхн До выбора слабины ток двигателя 5 меньше порога срабатывания устройства 2О. Порог срабатывания ycjpoflства 2О выбирается равным значению, тока, соответствующего минимальному rtaтяженню в полосе 2, или регулируется в функции сигнала 2 задания величины тока, т.е. натяжения в полосе. Малый Динамический ток при разгоне каретки до скорости выбора слабины обеспечивается медленным наростанием сигнала а (устройство фсрмярования сигнала во щэемени на чертеже не показано). На клапане 27 также отсутствует совпадение сигналов, оскольку отсутствует сигнал 9 с выхоа триггера 24. Установка триггера 24 исходное состояние обеспечивается поачей сигнала б оператором или автомаически (JO или одновременно с сигнаом О . Таким образом, рюле 25 не дат разрешения на движение полосы, а рее 28 не фиксирует ее обрыва. 781 В момент окончания выбора слабины каретка 1 упирается в полосу и останавливается, в связи с чем пороговое устройство 21 возвращается в исходное состояние и появляется сигнал на одном из входов клапана 23. Остановка каретки 1 приводит к спаданию до нуля сигнала в обратной связи по скорости и к насыщению регулятора 17 скорости сигналом С| Система переходит в режим регулирования тока двигателя 5. Ток нарастает и пороговое устройство 20 срабатывает, обеспечивая подачу и второго сигнала на вход клапана 23. Триггер 24 срабатывает, включая реле 25 и разрешая разгон всего агрегата. При этом с клапана 27 снимается сигнал запрета работы цепи ксжвтроля обрьша полосы. При большом сортаменте по ширине и толщине офабатываемых полос 2, а также при заранее установленном постоянном пороге . срабатывания (из расчета минимального сечения) устройства 2О, что значительно его упрощает, возможен и иной пфядок работы. В случае прохождения по агрегату полосы большого сечения нагрузка на двигателе от полосы MoxteT превысить порог срабатывания устройства 2О еще до упора каретки . в полосу. Однако каретка будет продолжать двигаться и пороговое устройство 21 чере инвертер 22 запрещает включение реле 25 и пуск агрегата. Только лишь при остановке каретки при упоре в полосу система переходит в режим регулирования тока, а цепь контроля выбора полосы и создания в ней натяжения разрешает пуск Если, одновременно с подачей сигнала а на систему регулирования приводов аг регата подаются и сигналы задания выб- ранной скорости (для станций 6 и 7 соот ветственно сигналы DK и U ), то разгон агрегата начинается сразу после срабаты вания реле 25. При дальнейшей работе агрегата на различных скоростях сигналы сГ и -6 всегда соответствуют друг другу, в связи с чем сигнал а продолжает обеспечивать насыщение регулятора 17 скорости. При обрыве полосы в аккумуляторе нагрузка на двигателе 5 падает и он (и карет.ка 1) начинает разгоняться. Однако скорость его повышается на незначительную веничину, определяемую сигналом а , по сравнению с заданным сигналом в так как увеличивающийся сигнал обратной связи компенсирует сигнал а, что приводит к выходу регулятора 7 скорости из насыщения и к переоду системы автоматически в регулирования скорости. Никаких нежелательных воздействий электро- и механооборудованне при этом не испытывают. Одновременно, возникшая разность между заданной сигналом скоростью и фактической скоростью, определяющей сигнал -б фиксируется пороговым устройством 26, которое включает реле 28 и останавливает станции 6 и 7 и весь агрегат в целом. На чертеже не псжазаны узлы компенсации потерь в механизме и коррекции скорости входной станции 6 по положеншо каретки 1 в рабочей зоне. Динамическая компенсация по току двигателя при ускорениях обеспечивается вводом сигнала К , вырабатываемого задатчиком скорости. Таким образом, применение предлагаемого устройства обеспечивает нормальную работу обсрудования во всех режимах в соответствии с технологическими требованиями и предотвращает поломку оборудования и развитие аварии при обрьше полосы. Формула изобретения Устройство для управления аккумулятором полосы, содержащее электропривод перемещения каретки петлеаккумулятора, включающий в себя электродвигатель, питающий его тиристорный преобразователь, блок регулирования тока якоря двигателя, узел компенсации динамического тока, узел компенсации потерь в механизме; электропривод входной тянущей станции с блоком регулирования скорости двигателя и узлом коррекции скорости по положению каретки петлеаккумулятора по сигналу сельсина-датчика, установленного на барабане каретки, отличающееся тем, что, с целью повышения качества регулирования, предупреждения ударов каретки :в полосу при выборе слабины, повышения быстродействия и Точности контроля обрывов полось, в устройство дополнительно введены блок регулирования скорости каретки петлеаккумулятора, содержащий задатчик скорости, датчик тока, датчик скорости и управляющий блок регулирования тока, триггер, два реле, первый пороговый элемент контроля тока двигателя каретки, второй пороговый элемент контроля скорости перемещения каретки, третий пороговый элемент контроля разности заданной и фактической скоросгей каретки, инвертор и Два клапана И причем выход первого пороговето- элемента соединен с одним входом первого клапана И, выход второго через инвертор соединен с другим входом клапана И, выход которого подключен к триггеру, соединенному с первым реле разрешения вращения двигателей входной и выходнсА тянущих станций, выход третьего порогсжого элемента подключен ко входу второго клапана И, /ругой вход к торото соединен с вькодом триггера, а выход со вторым реле кштроля
полосы и остановки двигателей тянущих станций и каретки аккумулятора, входы
пфсяговых эпсментов соединены соответственно с выходами датчика тока, датчика скорости и задатчика скорости.
Источникк информации, принятые во втгмание при экспертизе
1.Патент Великобритании № 1426628, кл. В 3 М 1974.
2.Глейснер , Вилке Эккард. Электрическое оборудсюание выссжовроизводительнсй травильной устаноыси для обработки лент.-Журнал Фирма Сименс, спецвыпуск, 1977, к выставке Электро77, с. 131.132.
3.Авторское свидетельство СССР NO 437О53, кл. G 05 D 3/О4, 1972.



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU998526A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU984530A1 |
| Устройство для управления аккумулятором стальной полосы | 1971 |
|
SU437053A1 |
| Устройство для управления слитковозом с канатным приводом | 1979 |
|
SU858197A2 |
| Устройство для управления приводом | 1983 |
|
SU1180411A1 |
| Устройство автоматического регулирования профиля прокатываемой полосы | 1974 |
|
SU880530A1 |
| Устройство управления электроприводом многоленточного фрикционного намоточного барабана | 1985 |
|
SU1299638A1 |
| Устройство управления реверсивным правильно-дрессировочным станом | 1980 |
|
SU884768A1 |
| Система автоматического регулирования скорости вытягивания слитка на машине непрерывного литья заготовок | 1988 |
|
SU1544524A1 |
| СПОСОБ УПРАВЛЕНИЯ ОТКРЫВАНИЕМ ДНИЩА КОВША ЭКСКАВАТОРА | 2023 |
|
RU2816132C1 |

