Изобретение относится к машиностроению, а именно к исполнительным устройствам роботов, и может быть использовано как система привода звена робота.
Целью изобретения является расширение эксплуатационных возможностей сустава робота.
Сущность предлагаемого изобретения состоит в присоединении к антагонистической паре электронных мышц контуров регулирования позиции и силы привода, которые содержат внутренние контуры регулирования токов адсорбентов электронных мышц, а также в присоединении задатчика силы, управляющего контуром регулирования позиции и силы, связанных с датчиком положения выходного элемента привода - потенциометром и с внешним устройством задания режима работы системы привода сустава робота. Сигнал обратной связи по силе привода формируется как
алгебраическая сумма сигналов, пропорциональных разности температур нагрева электронных мышц и положению выходного элемента привода.
Внешнее устройство задает один из трех режимов:
1. Отработка заданной позиции приводом.
2. Отработка заданной силы при отсутствии задания на позицию.
3. Отработка позиции и силы, одновременно заданных своими диапазонами значений.
Задатчик силы в соответствии с пришедшей к нему извне командой начинает работать в одном из этих трех режимов.
По сравнению с известными аналогами заявляемое устройство благодаря измерению положения выходного элемента привода может быть использовано для перемещения звена робота по заданному
Ё
00
ел
NJ О 00
закону, также благодаря измерению и регулированию силы привода оно может быть использовано для отработки заданного закона изменения силы, создаваемой неподвижным звеном робота и, наконец, заявляемое устройство может быть использовано для одновременной отработки позиции и силы, заданных зонами своих значений, изменяющимися во времени, это существенно расширяет эксплуатационные возможности управляемого сустава робота. Наличие в заявляемом объекте соединения элементов, которое включает задатчик силы, который состоит из первого и второго ключей и первого сумматора, задатчик то- ков, который состоит из второго сумматора, первого и второго апериодических звеньев, первого инвертора, третьего сумматора и третьего ц, четвертого ключей, контур регулирования тока адсорбента первой элект- ронной мышцы и контур регулирования тока адсорбента второй электронной мышцы, каждый из которых состоит из резистивного делителя, электрических контактов и адсор- бента электронной мышцы, датчика тока, содержащего токовый шунт и усилитель, инвертора, сумматора и усилителя, а также первый и второй умножители, третье и четвертое апериодические звенья, второй инвертор, передаточный механизм, потенциометр и третий инвертор, причем первый вход привода соединен с первыми входами первого и второго ключей, второй вход привода соединен со вторым входом первого сумматора, третий вход привода со- единен со вторым входом второго ключа, выход первого ключа соединен с первым входом первого сумматора, а выход второго ключа соединен с третьим входом первого сумматора, выход которого соединен с пер- вым входом второго сумматора, выход которого соединен со входами первого и второго апериодических звеньев, выход первого апериодического звена соединен со входом первого инвертора, выход которого соеди- йен с первым входом третьего сумматора, выход второго апериодического звена соединен со вторым входом третьего сумматора, выход которого соединен со входами третьего и четвертого ключей, выход треть- его ключа соединен с первым входом сумматора контура регулирования тока адсорбента первой электронной мышцы, а выход четвертого ключа соединен с первым входом сумматора контура регулирования тока адсорбента второй электронной мышцы, причем в каждом контуре регулирования тока адсорбента электронной мышцы выход сумматора соединен со входом усилителя, причем выход усилителя соединен с двумя
параллельно соединенными электрическими ветвями, одна из которых состоит из резистивного делителя, другая состоит из последовательно соединенных электрических контактов электронной мышцы, адсорбента и токового шунта, который соединен со входом усилителя датчика тока, выход которого соединен со входом инвертора, выход которого соединен со вторым входом сумматора контура регулирования тока, второй вход первого ключа соединен с выходом третьего инвертора, вход третьего инвертора и второй вход второго сумматора соединены с выходом потенциометра, третий вход второго сумматора соединен с выходом третьего апериодического звена, вход которого соединен с выходом первого умножителя, первый вход которого соединен с выходом усилителя датчика тока адсорбента первой электронной мышцы, а второй вход первого умножителя соединен с выходом резистивного делителя, четвертый вход второго сумматора соединен с выходом второго инвертора, вход которого соединен с выходом четвертого апериодического звена, вход которого соединен с выходом второго умножителя, первый вход которого соединен с выходом усилителя датчика тока адсорбента второй электронной мышцы, второй вход второго умножителя соединен с резистивным делителем второй электронной мышцы, а передаточный механизм механически соединен с первой и второй электронными мышцами и с потенциометром, является совокупностью новых признаков, неизвестных из каких-либо источников информации.
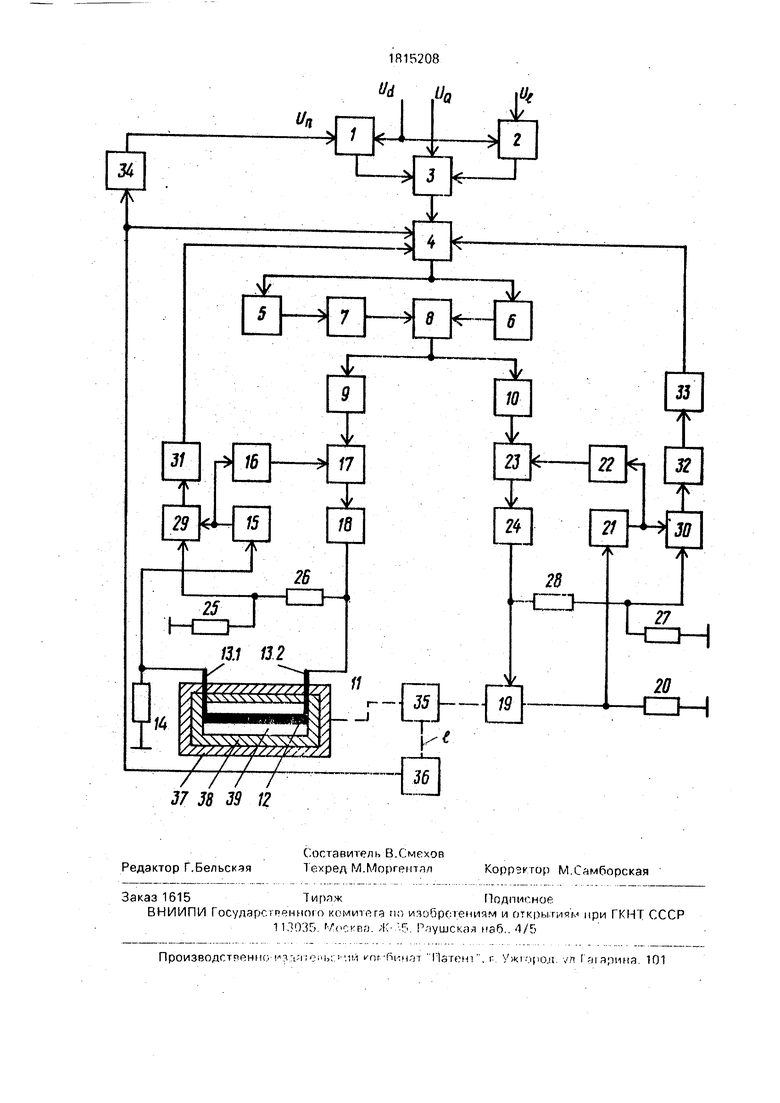
На чертеже изображена схема системы привода сустава робота на электронных мышцах.
Заявляемая система привода сустава робота на электронных мышцах (фиг. 1) содержит задатчик силы, состоящий из ключей 1 и 2 и сумматора 3, задатчик токов, состоящий из сумматора 4, апериодических звеньев 5 и б, инвертора 7, сумматора 8, ключей 9 и 10, контур регулирования тока адсорбента электронной мышцы 11, состоящий из адсорбента 12, электрических контактов 13.1, 13.2, токового шунта 14, усилителя датчика тока 15, инвертора 16, сумматора 17, усилителя 18, контур регулирования тока адсорбента электронной мышцы 19, состоящий из адсорбента, электрических контактов, токового шунта 20, усилителя датчика тока 21, инвертора 22, сумматора 23, усилителя 24, а также резистивные делители 25, 26 и 27, 28 умножители 29 и 30. апериодические звенья 31 и 32, инвертор 33, и инвертор 34, передаточный механизм 35 и потенциометр 36. На
фиг. 1 обозначено: UQ - сигнал задания силы привода, Ui -сигнал задания положения выходного элемента привода, Ud - сигнал отпирания ключей 1 и 2 при Ui 0, f - положение выходного элемента привода, Un - напряжение на выходе потенциометра. Электронные мышцы 11 и 19 идентичны. Каждая электронная мышца содержит электрические контакты 13.1, 13.2, анизотропную оболочку 37, эластомерную оболоч- ку 38, адсорбатный наполнитель 39, адсорбент 12. Вход привода, на котором действует сигнал Ud. соединен с первыми входами ключей 1 и 2, вход привода для задания силы привода соединен с вторым входом сумматора 3, вход привода для задания положения выходного элемента привода соединен с вторым входом ключа 2, выход ключа 1 соединен с первым входом сумматора 3, а выход ключа 2 соединен с третьим входом сумматора 3, выход которого соединен с первым входом сумматора 4, выход которого соединен с входами апериодических звеньев 5 и б, выход апериодического звена 5 соединен с инвертором 7, выход которого соединен с первым входом сумматора 8, выход апериодического звена 6 соединен со вторым входом сумматора 8, выход которого соединен с входами ключей 9 и 10, выход ключа 9 соединен с первым входом сумматора 17, выход ключа 10 соединен с первым входом сумматора 23, вы- ход сумматора 17 соединен с входом усилителя 18, выход которого соединен с двумя параллельно соединенными электри- ческими цепями, одна из которых состоит из резистивного делителя 25 и 26, другая состоит из последовательно соединенных .электрических контактов 13.1, 13.2, адсорбента 12 и токового шунта 14, соединенного с входом усилителя датчика тока 15, выход которого соединен со входом инвертора 16 выход которого соединен с вторым входом сумматора 17, выход сумматора 23 соединен с входом усилителя 24, выход которого соединен с двумя параллельно соединёнными электрическими цепями, одна из которых состоит из резистивного делителя 27 и 28, другая состоит из последовательно соединенных электрических контактов, адсор- бента электронной мышцы 19 и токового шунта 20, соединенного с входом усилителя датчика тока 21, выход которого соединен с входом инвертора 22, выход которого соединен со вторым входом сумматора 23. вто- рой вход ключа 1 соединен с выходом инвертора 34, вход инвертора 34 и второй вход сумматора 4 соединены с выходом потенциометра 36, третий вход сумматора 4 соединен с выходом апериодического звена 31, вход которого соединен с выходом умножителя 29, пеовый вход которого соединен с выходом усилителя датчика тока 15, второй вход умножителя 29 соединен с выходом резистивного делителя 25 и 26, четвертый вход сумматора 4 соединен с выходом инвертора 33, вход которого соединен с выходом апериодического звена 32. вход которого соединен с выходом умножителя 30, первый вход которого соединен с выходом усилителя датчика тока 21, второй вход умножителя 30 соединен с выходом резистивного делителя 27 и 28, а передаточный механизм 35 механически соединен с электронными мышцами 11 и 19 и с потенциометром 36.
Ключ 9, соединенный с сумматором 17 контура регулирования тока адсорбента электронной мышцы 11, пропускает только входной сигнал, имеющий потенциал положительной полярности. Ключ 10, управляющий сумматором 23 контура регулирования тока адсорбента электронной мышцы 19, пропускает только входной сигнал отрицательной полярности. Ключи 9 и 10 другими сигналами не управляются.
Система привода сустава робота на электронных мышцах, схема которой изображена на чертеже, работает следующим образом.
От внешнего устройства задания режима работы системы привода поступают воздействия: Ui. Ud и UQ. Если то на выходе сумматора 3 действует сигнал для первого режима:
(Ui-Un),
где сигнал Un снимаемый с выхода потенциометра 36 (фиг. 1),
пропорционален положению выходного элемента привода I, Ki const 0. В этом режиме происходит отработка приводом заданной позиции;
, ключи 1 и 2 открыты.
Если , то на выходе сумматора 3 получаем сигнал:
x UQ,
где K2 const 0. Это второй режим. Ему соответствует отработка заданного закона изменения силы привода, )- Ключи 1 и 2 заперты.
В третьем режиме при Ui #Q и UQ 0 получаем
x (Ui-UnHte x UQ .
При этом . ключи 1 и 2 открыты.
С помощью сумматора 4 (фиг. 1) складываются сигнал задания силы {первый вход) и сигналы, сумма которых пропорциональна силе привода со знаком минус (остальные входы).
Сила развиваемая приводом, равна:
О-Кз х (Ю| х (Ta-TiH).
где Ti - температура нагрева первой элект- ронной мышцы;
Т2 - температура нагрева второй электронной мышцы;
I - положение выходного элемента привода;
Кз. К4 положительные коэффициенты.
Сила, развиваемая одной эластичной мышцей определяется по закону Гука, как разность между длиной ненагруженной мышцы и ее реальной длиной. Для антаго- нистической пары мышц Кз - коэффициент жесткости пары мышц, а разность температур определяет их ненагруженное состояние.
Уравнение температуры Тг.
dTi ЗГ
Уравнение температуры Ji: T2-t-r l2U2.
Здесь т- тепловая постоянная элект- ронной мышцы, И - ток адсорбента первой электронной мышцы, 2 ток адсорбента вто- рой электронной мышцы, LM - напряжение, пропорциональное напряжению подаваемому на сорбент первой электронной мыш- цы. Ua - напряжение, пропорциональное напряжению подаваемому на сорбент второй электронной мышцы, t - время.
Произведению HUi пропорционален сигнал выхода умножителя 29 (см. фиг. 1), произведению I2U2 пропорционален сигнал выхода умножителя 30. Сигнал выхода апериодического звена 31 пропорционален температуре TLСигнал выхода апериодиче- ского звена 32 пропорционален температуре Т2..
Сигнал выхода сумматора 4 преобразуется апериодическими звеньями 5, 6. Первое апериодическое звено 5 (см. фиг. 1) имеет передаточную функцию:
K5(S)
К5 1 ts
Второе апериодическое звено 6 (см. фиг. 1) имеет передаточную функцию:
K6(S)
Кб
1 +Ste
Здесь S - параметр преобразования Лапласа;
Ks, Кб коэффициенты передачи; ts и te постоянные времени, причем IKeKI. Настройка коэффициентов КБ, Кб и постоянных времени ts, te производится с целью получения интенсивного изменения токов адсорбентов электронных мышц в начальной .части переходного процесса системы привода и плавного изменения - в конечной части процесса.
Заявляемая система привода была реализована на операционных усилителях 544 УД2А. Приведенные формулы определяют основные теоретические положения системы привода, и могут быть математически строго доказаны, реальные настройки определяются динамическими диапазонами контуров прямого усиления и обратной связи,
Форму л а изобретения
Система привода сустава робота на электронных мышцах, образующих антагонистическую пару, в которой каждая из мышц содержит анизотропную и эластомер- ную оболочки, адсорбатный наполнитель и адсорбент с герметично выведенными за оболочки электрическими контактами, отличающаяся тем, что, с целью расширения технологических возможностей сустава, она дополнительно содержит задатчик силы, который состоит из первого и второго ключей и первого сумматора, за- датчик токов, который состоит из второго сумматора, первого и второго апериодических звеньев, первого инвертора, третьего сумматора и третьего и четвертого ключей, контур регулирования тока адсорбента первой электронной мышцы и контур регулирования тока адсорбента второй электронной мышцы, каждый из которых состоит из рези- стивного делителя, электрических контактов и адсорбента электронной мышцы, датчика тока, содержащего токовый шунт и усилитель, инвертора, сумматора и усилителя, а также первый и второй умножители, третье и четвертое апериодические звенья, второй инвертор, передаточный механизм, потенциометр и третий инвертор, причем первый вход привода соединен с первыми входами первого и второго ключей, второй; вход привода соединен с вторым входом первого сумматора, третий вход привода соединен с вторым входом второго ключа, выход первого ключа соединен с первым входом первого сумматора, а выход второго ключа соединен с третьим входом первого сумматора, выход которого соединен с пер- вым входом второго сумматора, выход которого соединен с входами первого и второго апериодических звеньев, выход первого апериодического звена соединен с входом первого инвертора, выход которого соединен с первым входом третьего сумматора, выход второго апериодического звена соединен с вторым входом третьего сумматора, выход которого соединен с входами третьего и четвертого ключей, выход треть- его ключа соединен с первым входом сумматора контура регулирования тока адсорбента первой электронной мышцы, а выход четвертого ключа соединен с первым входом сумматора контура регулирования тока адсорбента второй электронной мышцы, причем в каждом контуре регулирования тока адсорбента электронной мышцы выход сумматора соединен с входом усилителя, причем выход усилителя соединен с двумя параллельно соединенными электрическими ветвями, одна из которых состоит из резистивного делителя, другая состоит из последовательно соединенных электрических контактов электронной мышцы, ад-
сорбента и токового шунта, который соединен с входом усилителя датчика тока, выход которого соединен с входом инвертора, выход которого соединен с вторым входом сумматора контура регулирования тока, второй вход первого ключа соединен с выходом третьего инвертора, вход третьего инвертора и второй вход второго сумматора соединены с выходом потенциометра, третий вход второго сумматора соединен с выходом третьего апериодического звена, вход которого соединен с выходом первого умножителя, первый вход которого соединен с выходом усилителя датчика тока адсорбента первой электронной мышцы, а второй вход первого умножителя соединен с выходом резистивного делителя, четвертый вход второго сумматора соединен с выходом второго инвертора, вход которого соединен с выходом четвертого апериодического звена, вход которого соединен с выходом второго умножителя, первый вход которого соединен с выходом усилителя датчика тока ад- сорбента второй электронной мышцы, второй вход второго умножителя соединен с резистивным делителем второй электронной мышцы, а передаточный механизм механически соединен с первой и второй электронными мышцами и с потенциометром.
Заказ 1615Тираж Подписное
ВНИИПИ Государсгпеиного комитета по изоЬротениям и открытиям при I KH I. LLuH 113035. -/осква. Ж-/-5. Ряушскал паб.. 4/5
| название | год | авторы | номер документа |
|---|---|---|---|
| Формирователь многофазного синусоидального напряжения для частотно-управляемого электропривода | 1988 |
|
SU1598096A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для моделирования м-фазного вентильного преобразователя | 1974 |
|
SU524200A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Самонастраивающаяся следящая система с бесконтактным двигателем постоянного тока | 1984 |
|
SU1259212A1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
| Система стабилизации бурового судна | 1986 |
|
SU1360405A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Асинхронный вентильный каскад | 1991 |
|
SU1836801A3 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
Использование: в исполнительных устройствах роботов. Сущность изобретения: система привода сустава робота на электронных мышцах содержит антагонистическую пару мышц, контур регулирования позиции привода, контур регулирования силы привода и контуры регулирования токов адсорбентов мышц. Состояние антагонистической пары мышц изменяется в зависимости от команд на входе системы привода. Система находится в режиме отработки заданной позиции, либо ею отрабатывается заданный закон изменения силы, либо имеет место промежуточный режим. Система также содержит комплекс контуров управления положением и усилием привода в сочетании с антагонистической парой электронных мышц. 1 ил.
| Шарнирный узел руки робота | 1987 |
|
SU1465317A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
