Изобретение относится к устройствам, автоматизирующим технологические процессы в различных отраслях промышленности. .
Известен манипулятор /1/, содержащий звенья, кинематически связанные между собой гибкими тягами, расположенными в отверстиях звеньев, выполненных в виде выпуклых пластин, при этом дистальные концы гибких тяг соединены с конечным звеном и основанием посредством привода. Манипулятор снабжен электромагнитными устройствами и изолирующими прокладка- ми, в которых выполнены пазы под обмотки электромагнитных устройств, при этом звенья выполнены из магнитопроводного материала и разделены изолирующими прокладками, в которых выполнены двухсторонние выступы, а в звеньях - соответствующие им канавки,
Недостатки этого манипулятора: сложность конструкции и ограниченная рабочая зона, что вызвано недостаточной гибкостью исполнительного органа.
Известен также исполнительный орган манипулятора III, содержащий захват и подвижную систему в виде эластичного рукава, причем эластичный рукав собран из нескольких соединенных между собой по образующим трубок, каждая из которых армирована винтообразным каркасом, а между трубками пропущен гибкий элемент, например, шланг, обеспечивающий сжатие рукава вдоль оси.
Недостатки этого исполнительного органа манипулятора - сложность конструкции, недостаточные область манипулирования и количество манипуляций.
В качестве прототипа выбран манип 1Я- тор /3/, содержащий поворотный корпус, фланец, исполнительный орган, армированный винтообразным пружинным каркасом в виде пружины растяжения или сжатия с гидроприводами перемещения, а также узел ротации,
Недостатки этого манипулятора - узкие технологические возможности, а именно: ограниченная зона манипулирования, недо С
XI
Х|
о
статочная гибкость, малое количество выполняемых манипуляций, невозможность манипулирования в труднодостуг -ых местах.
Цель изобретения - расширение технологических возможностей, заключающаяся в увеличении зоны манипулирования и гибкости исполнительного.органа,увеличении количества, выполняемых манипуляций и функций, создании возможности работы в труднодоступных местах.
Поставленная цель достигается тем, что в манипулятор, содержащий общие с прототипом признаки; поворотный корпус, фланец, несущий исполнительный орган, выполненный в виде каркаса из цилиндрической пружины сжатия с гидроприводами перемещения и узлом ротации, дополнительно введены новые отличительные признаки4 исполнительный орган манипулятора снабжен переналаживаемым набором (комплектом) секций, каждая из ко торых выполнена из пакета пружин сжатия, расположенных одна внутри другой, с узлом ротации и гидроприводом изгиба секций, выполненным в виде гидроцилиндра, имеющего две полости, с гибким пружинным корпусом и с гибким штоком из пружинногг материала, размещенным между пружина ми и закрепленным свободным концом со стыковочным фланцем секции примем каж дая секция снабжена гибким защитным рукавом для гибкого штока с возможностью свободного возвратно-поступательного перемещения гибкого штока относительно гибкого защитного рукава
Предлагаемое изобретение соответст вует критериям существенные отличит и новизна, т.к в известных манипуляторах указанные выше отличительные признаки и технические эффекты от новых отличительных признаков не встречаются
Наличие комплекта секций исполнительного органа позволяет увеличить рабочую зону, переналадку манипулятора на разные виды работ увеличение выполняемых манипуляций
Выполнение каркаса исполнительного органа из пакета пружин сжатия, расположенных одна внутри другой, с узлом ротации и гидроприводом изгиба секций описанной конструкций позволяет повысить гибкость исполнительного органа, создает возможности для работы в труднодоступных местах, позволяет увеличить количество выполняемых функций (сбор информации, техническое обслуживание), ремонт, управление в труднодоступных местах),
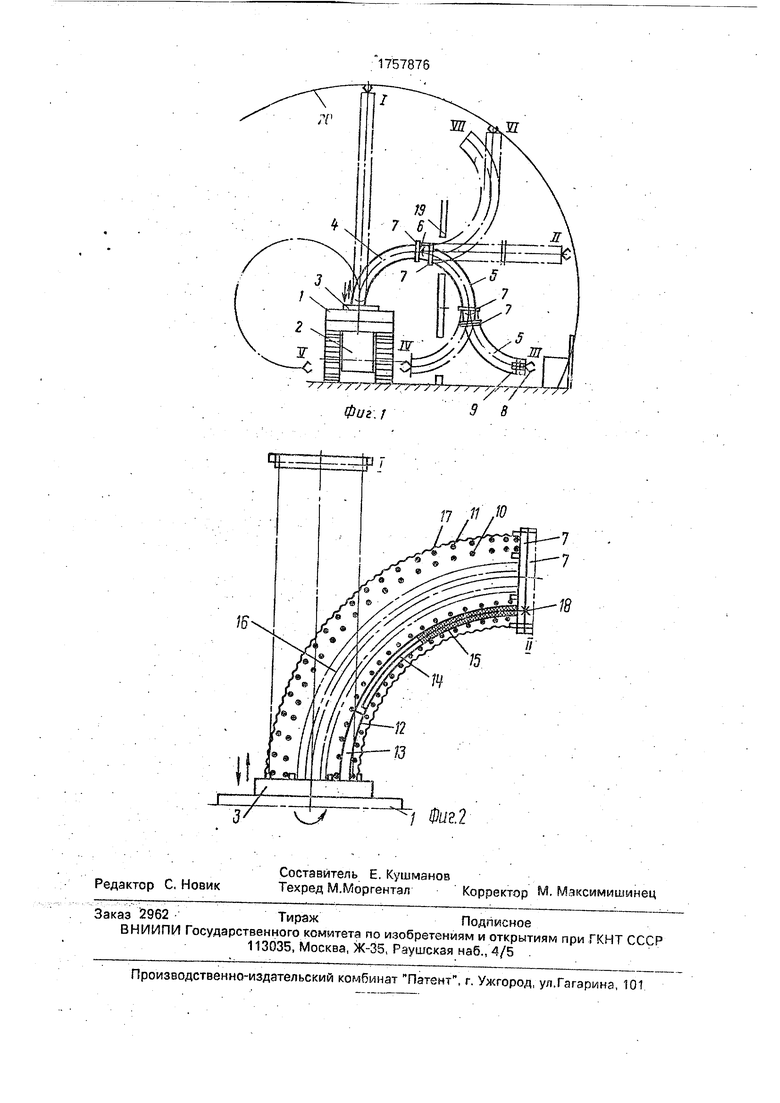
Техническая сущность и принцип действия манипулятора поясняются чертежами
фиг 1 - общий вид манипулятора
фиг 2 - общий вид секции исполнитель- ного манипулятора
Предлагаемый манипулятор состоит из поворотного корпуса 1, размещенного на самоходной дистанционно телеуправляемой тележке 2 с бортевой и вынесенной 0 аппаратурой (на чертежах не показана), фланца 3, установленного на корпусе 1 с возможностью вертикального возвратно- погтупагельного перемещения, исполнительного органа 4 с гидроприводами 5Исполнительный орган 4 состоит из переналаживаемого набора (комплекта) секций 5 с узлами ротации б и стыковочными фланцами 7 На последней секции 5 установлены 8 и компактная телекамера 9 0 с излучателем света
Гибкий каркас каждой секции состоит из пакета цилиндрических винтовых пружин
10и 11, установленных одна внутри другой и жесткосряззнных своими концами с флэн5 цами 7 или 3 Между двумя пружинами 10 и
11установлен гидропривод 12 и изгиба секции состоящий из гидроцилиндра, имеющего две полости, с гибким пружинным корпусом 13 и гибкого штока из пружинного
0 материала 14, имеющего возможность свободно возвратно-поступательно переме- щяться по гибкому защитному рукаву 15 Внутри меньшей пружины 19 и между пружинами 10 и 11 размещаются рукава высо5 кого давления 16 гидроприводов схвата и других секций Узлы ротации 6 имеют отверстия сквозь которые проходят рукава 16 Гибкие поужинчые каркасы секций исполнительного органа снаружи защищены от
0 попадание пыли, грязи и влаги гофрированным защитным кожухом 17 Стыковка фланцев 7 различных секций 5 осуществляется с помощью резьбовых соединений или подпружиненных фиксаторов, а гибкий шток 14
5 жестко закреплен на фланце 7 с помощью заделки 18 Кроме того, на чертежах изображены объект 19, в котором мог/т осуществляться манипуляции технического обслуживания, ремонта, управления или
0 сбора информации (позиции II и III) и верхняя граничная зона манипулирования 20
На фиг 1 изображены некоторые положения исполнительного органа манипулятора (поз.1 - VI) с целью иллюстрации
5 технических возможностей гибкого исполнительного органа
В зависимости от рода выполняемых работ исполнительный орган манипулятора собирают из нужного количества секций 5 с неоС одимыми для работы функциями
В исходном положении исполнительный орган в зависимости от уоповий работы может занимать любое положение, напри- мер, положение 1, при полностью выпрямленномпружинномкаркасеисполнительного органа
Для управления самоходной тележкой манипулятора и для изгиба и ротации каждой секции в требуемой направлении на требуемую величину оператор, наблюдая за объектом 19 с помощью зрительного сенсора, дает соответствующие команды на пульте управления на перемещение тележки изгиба и ротацию секций
Работа манипулятора осуществляется следующим образом:
Для изгиба секции при включении кнопки или ручки управления поршень гидроцилиндра 13 перемещается вниз, тянет за собой гибкий шток 14, проходящий свобод- но сквозь защитный рукав 15 и сжимающий посредством соединенного с фланцем 7 штока 15 пакет пружин 10 и 11 в направлении, изображенном на фиг.2. Для осуществления фиксации секции в заданном положении (оператор определяет, наблюдая с помощью зрительного сенсора за положением схвата манипулятора относительно объекта манипулирования) осуществляется отсечка рабочей жидкости в обеих полостях гидроцилиндра установкой ручки или кнопки управления в нейтральное положение При этом изгибается также и корпус гидроцилиндрз 13, выполненный из пружинною материала и гибкий шток 14. Аналогично изгибаются в нужном направлении на заданную величину и другие секции.
При подаче рабочей жидкости в другую полость гидроцилиндра изгиба секции пор- шень поднимается вверх, гибкий шток также поднимается вверх вместе с фланцем 7. Пружины 10 и 11 распрямляются и секция занимает исходное положение 1.
Узлы ротации б секций 5 позволяют с помощью поворота секций на требуемый угол осуществлять изгиб секций в любых плоскостях, что значительно расширяет технологические возможности манипулятора (Испотнительный орган манипулятора обладает гибкостью дрессированного питона).
Для упрощения управления исполнительным органом на пультеуправления вместо кнопочного или рукоято ного управления может быть установлен задающий орган манипулятора, геометрически подобный исполнительному. В этом случае упра .ление исполнительным органом осуществляется с помощью копирования движений задающего органа.
Применение такого манипулятора позволит расширить его технологические возможности за счет увеличения зоны манипулирования и гибкости исполнительного органа, увеличения количества выполняемых функций и манипуляций, возможности работы в труднодоступных местах. Наибольший эффект от использования такого манипулятора ожидается в гибких автоматизированных производствах.
Формул а изобретения Манипулятор, содержащий поворотный корпус, связанный с ним фланец, несущий исполнительный орган, выполненный в виде гибкого каркаса из цилиндрической пру- жины сжатия с гидроприводами его перемещения и ротации, отличающий- с я тем, что, с целью расширения технологических возможностей, исполнительный органманипулятораснабженпереналаживаемым набором секций, каждая из которых выполнена в виде пакета пружин сжатия, расположенных одна внутри другой, узла ротации этой секции и гидропривода ее изгиба, выполненного в виде двухполостного гидроцилйндра, имеющего гибкий корпус и гибкий шток из пружинного материала, при этом гидроцилиндр размещен между пружинами и закреплен на стыковочном фланце секции, а в корпусе гидроцилиндра размещен гибкий защитный рукав, охватывающий гибкий шток с возможностью свободного возвратно-поступательного перемещения штока относительно этого защитного рукава.
V / / 7 Sj 7 7i-r-/7;

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1355485A1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2002 |
|
RU2224637C1 |
| Манипулятор | 1989 |
|
SU1720853A1 |
| Манипулятор Ильина | 1983 |
|
SU1148777A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Исполнительный орган манипулятора | 1980 |
|
SU889417A1 |
| РЕМОНТНО-СТРОИТЕЛЬНЫЙ ПЫЛЕСОС-КОМБАЙН | 2009 |
|
RU2403854C1 |
| Манипулятор | 1980 |
|
SU919804A1 |
Использование: автоматизация технологических процессов. Манипулятор состоит из переналаживаемого комплекта секций с узлами ротации и гидроприводами изгиба секций, которые выполнены каждый в виде гидроцилиндра с изгибающимся пружинным корпусом и с гибким штоком, выполненным из пружиннбго материала. Каждая секция исполнительного органа имеет гибкий каркас, выполненный из пакета пружин сжатия, которые связаны с фланцами. 2 ил.
ЕЕ
и
Фиг.
9 В
/7 ,Я ,«
г |5г77
1 -, -Г /
/ te.2
| Манипулятор | 1986 |
|
SU1355485A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
