Изобретение относится к области промышленной робототехники и может быть использовано при проектировании роботов с внешними магнитными системами, а также может использоваться для механизации и технологических операций.
Известен промышленный робот (Авторское свидетельство Литвиненко A.M. №1537517, опубл. 23.01.90, бюл. №3, заявка 4365867/31-08 от 20.01.88), содержащий внешнюю магнитную систему с обмотками, выполненную в виде индуктора с цилиндрическим зазором, в котором перемещаются закрепленные на вращающемся основании якори, соединенные с редукторами и далее со звеньями робота. Имеется поворотное основание (колонна с приводом поворота), рука с схватом, цилиндрический кольцевой зазор, образованный полюсными наконечниками, имеется также привод поворота плеча, на плече установлен блок приводов поворота локтя, поворота схвата, ротации схвата. Также он снабжен дополнительной рукой с приводами ее перемещения, при этом ось поворота дополнительной руки расположена концентрично оси поворота основной руки, а магнитные системы приводов выдвижения основной и дополнительной руки расположены коаксиально.
Недостатком данного изобретения является большие массогабаритные показатели, а также низкие технологические возможности, обусловленные малой маневренностью кинематической цепи.
Наиболее близким по технической сущности является промышленный робот (Авторское свидетельство Литвиненко A.M. СССР №1342723, опубл. 07.10.87, бюл. №37, заявка 4076643/31-08 от 20.06.86), содержащий внешнюю магнитную систему с обмотками, выполненную в виде индуктора с цилиндрическим зазором, в котором перемещаются закрепленные на вращающемся основании якори, соединенные с редукторами и далее с звеньями робота. Имеется поворотное основание (колонна с приводом поворота), рука с схватом, цилиндрический кольцевой зазор образован полюсными наконечниками, имеется также привод поворота плеча, на плече установлен блок приводов поворота локтя, поворота схвата, ротации схвата.
Недостатком прототипа является низкие технологические возможности, обусловленные малой маневренностью кинематической цепи.
Изобретение направленно на повышение зоны обслуживания и уменьшение массы подвижных частей.
Это достигается тем, что промышленный робот, содержащий основание, руку манипулятора, установленную на платформу с шарнирами, внешнюю магнитную систему в виде статора с полюсами и обмотками и привода поступательного перемещения, согласно изобретению приводы поступательного перемещения расположены в зазоре между полюсами статора, при этом каждый из привод содержит активные приводные элементы в виде спирально-пространственных токопроводящих элементов, неподвижный шток, соединенный шарниром с основанием, подвижный шток, соединенный шарниром с платформой, и пружины, закрепленные на корпусе привода и подвижном штоке.
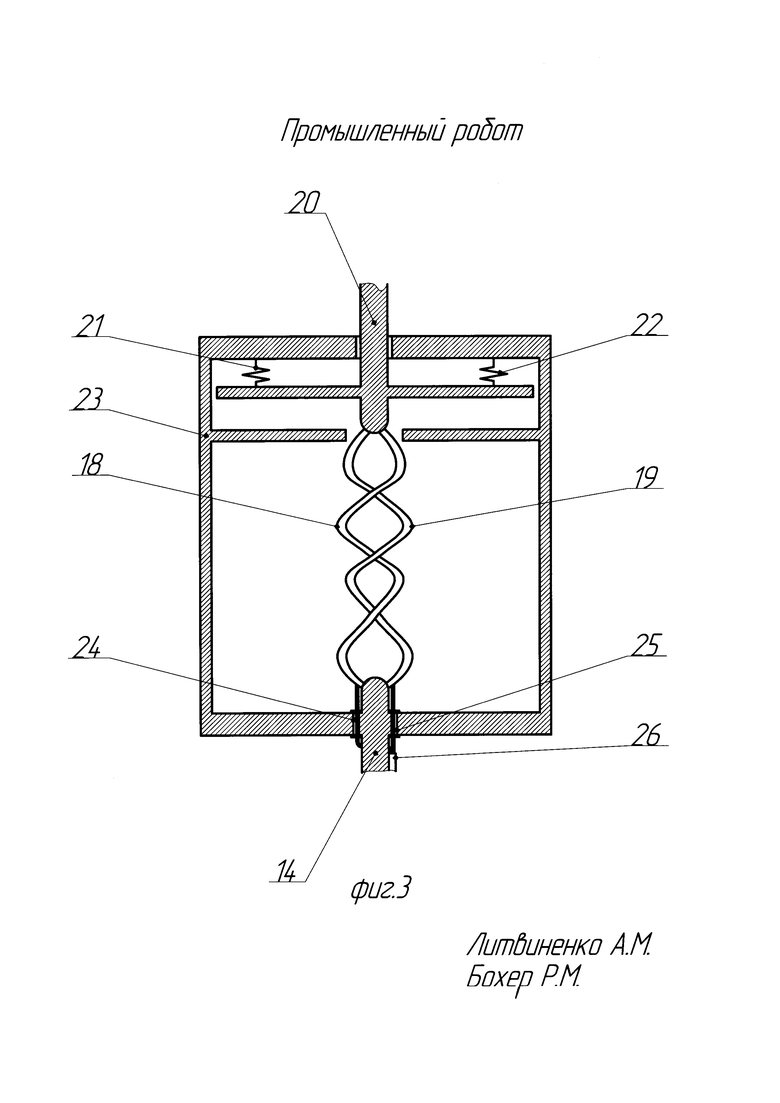
Изобретение иллюстрируется чертежами, где на фиг. 1 показан заявленный робот, вид спереди в разрезе. Схема соединения основания с платформой в развертке изображена на фиг. 2. На фиг. 3 представлена конструкция привода поступательного перемещения.
Промышленный робот содержит основание 1, привод поступательного перемещения 2, статор с полюсами 3 и обмотками 4, платформу 5, на которой установлена рука 6 с схватом 7. Привода поступательного перемещения 2 соединены с платформой 5 с помощью подвижных штоков 8, 9, 10, соединяющиеся с платформой 5 шаровыми шарнирами 11, 12, 13.
Привод поступательного перемещения 2 имеет неподвижный шток 14, который соединен шаровыми шарнирами 15, 16, 17 с основанием 1. Привод поступательного перемещения содержит активный элемент, выполненный в виде спирально-пространственного элемента, содержащего ветвь 18 и ветвь 19. В месте их перегиба ветви 18 и 19 соединены с подвижным штоком 20. Так же конструкция привода поступательного перемещения содержит две пружины 21 и 22 закрепленные на корпусе привода 23 и подвижном штоке 20. Втулки с изоляцией 24 и 25 закреплены на корпусе 23, кабель 26 закреплен к неподвижному штоку 14.
Промышленный робот работает следующим образом. Для перемещения платформы в требуемом направлении, необходимо подключить к источнику электрической энергии (не показан) обмотку 4 статора, который создаст магнитный поток в зазоре между полюсами 3, и привод поступательного перемещения 2. При включении источника электрической энергии ток в приводе поступательного перемещения протекает по активному элементу, представленному в виде спирально-пространственного токопроводящего элемента, при этом возникают электромагнитные поля. Так как ток в ветвях 18 и 19 имеет разное направление, то за счет магнитных полей происходит взаимооталкивание ветвей, вследствие чего подвижный шток перемещается вниз. Расположение привода поступательного перемещения в зазоре между полюсами увеличивает тяговое усилие привода за счет воздействия внешних магнитных полей. Пружины 21 и 22 служат для возвратно поступательного движения привода, а электрический ток поступает к приводу поступательного перемещения по кабелю 26, через втулки с изоляцией 24, 25.
Введение основания, руки манипулятора, установленную на платформу с шарнирами, внешней магнитной системы и активных приводных элементов, позволяет увеличить зону обслуживания робота, а активные элементы выполнены в виде спирально-пространственных токопроводящих элементов, расположенных между платформой и основанием, позволяют снизить массогабаритные показатели робота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот промышленный | 2014 |
|
RU2634392C2 |
| Привод исполнительного органа манипулятора | 1988 |
|
SU1548041A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Промышленный робот | 1989 |
|
SU1684022A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |

Изобретение относится к области промышленной робототехники и может быть использовано при проектировании роботов с внешними магнитными системами, а также может использоваться для механизации и технологических операций. Промышленный робот содержит основание, руку манипулятора, установленную на платформе с шарнирами, внешнюю магнитную систему в виде статора с полюсами и обмотками и приводы поступательного перемещения. При этом приводы поступательного перемещения расположены в зазоре между полюсами статора, каждый привод содержит активные приводные элементы в виде спирально-пространственных токопроводящих элементов, неподвижный шток, соединенный шарниром с основанием, подвижный шток, соединенный шарниром с платформой, и пружины, закрепленные на корпусе привода и подвижном штоке. Изобретение направлено на повышение зоны обслуживания и уменьшение массы подвижных частей. 3 ил.
Промышленный робот, содержащий основание, руку манипулятора, установленную на платформе с шарнирами, внешнюю магнитную систему в виде статора с полюсами и обмотками и приводы поступательного перемещения, отличающийся тем, что приводы поступательного перемещения расположены в зазоре между полюсами статора, при этом каждый привод содержит активные приводные элементы в виде спирально-пространственных токопроводящих элементов, неподвижный шток, соединенный шарниром с основанием, подвижный шток, соединенный шарниром с платформой, и пружины, закрепленные на корпусе привода и подвижном штоке.
| Промышленный робот | 1986 |
|
SU1342723A1 |
| ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2211523C2 |
| Привод линейного перемещения | 1984 |
|
SU1283082A1 |
| US 20130071218 A1, 21.03.2013. | |||

