сл
ел
о кэ 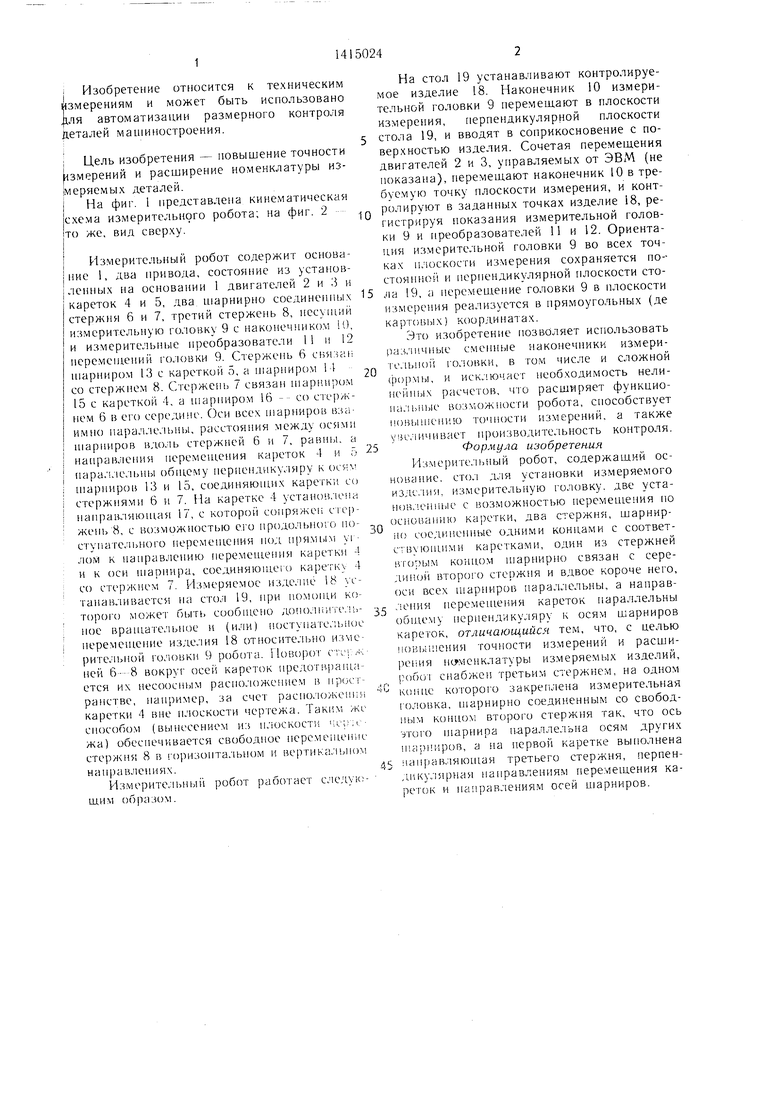
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный робот | 1984 |
|
SU1359639A1 |
| Координатная измерительная машина | 1983 |
|
SU1226004A1 |
| СФЕРОМЕТР УНИВЕРСАЛЬНЫЙ МОТОРИКИНА Г.П. | 2001 |
|
RU2198378C2 |
| Трехкоординатная измерительная головка | 1990 |
|
SU1791697A1 |
| Устройство для контроля диаметров отверстий | 1990 |
|
SU1772614A1 |
| Координатная измерительная головка | 1990 |
|
SU1783273A1 |
| Устройство для сборки охватываемой и охватывающей деталей типа вал-втулка | 1982 |
|
SU1215255A1 |
| ДВУХКООРДИНАТНЫЙ МИКРОПОЗИЦИОНЕР | 2006 |
|
RU2306621C1 |
| ИЗМЕРИТЕЛЬНАЯ ГОЛОВКА К ТВЕРДОМЕРУ БРИНЕЛЛЯ ДЛЯ РЕГИСТРАЦИИ НАГРУЗКИ И ГЛУБИНЫ ВДАВЛИВАНИЯ | 2005 |
|
RU2320974C2 |
| Прибор для контроля ходовых винтов станков | 1981 |
|
SU986613A1 |

Изобретение относится к техническим измерениям и может быть использовано для автоматизации размерного контроля деталей машиностроения. Цель изобретения - повышение точности измерений и расширение номенклатуры измеряемых деталей. ИзА мерительный робот содержит основание I, стол 19 для установки измеряемого изделия 18, стержни 6, 7 и 8. Стержень 6 связан шарниром 13 с кареткой 5, а шарниром 14 - со с тержнем 8, несущим рабочую головку 9. Стержень 7 связан шарниром 15 с кареткой 4, а шарниром 16 - со стержнем 6 в его середине. Оси всех шарниров 13, 14, 15 и 16 взаимно параллельны. Расстояния между осями шарниров каждого из стержней 6 и 7 равны, т.е. стержень 6 в два раза больше стержня 7. Направления перемещения кареток 4 и 5 параллельны общему перпендикуляру к осям шарниров 13 и 15, соединяющих каретки со стержнями 6 и 7, Каретка 4 установлена в направляющей 17 с которой сопряжен стержень 8. 2 ил. б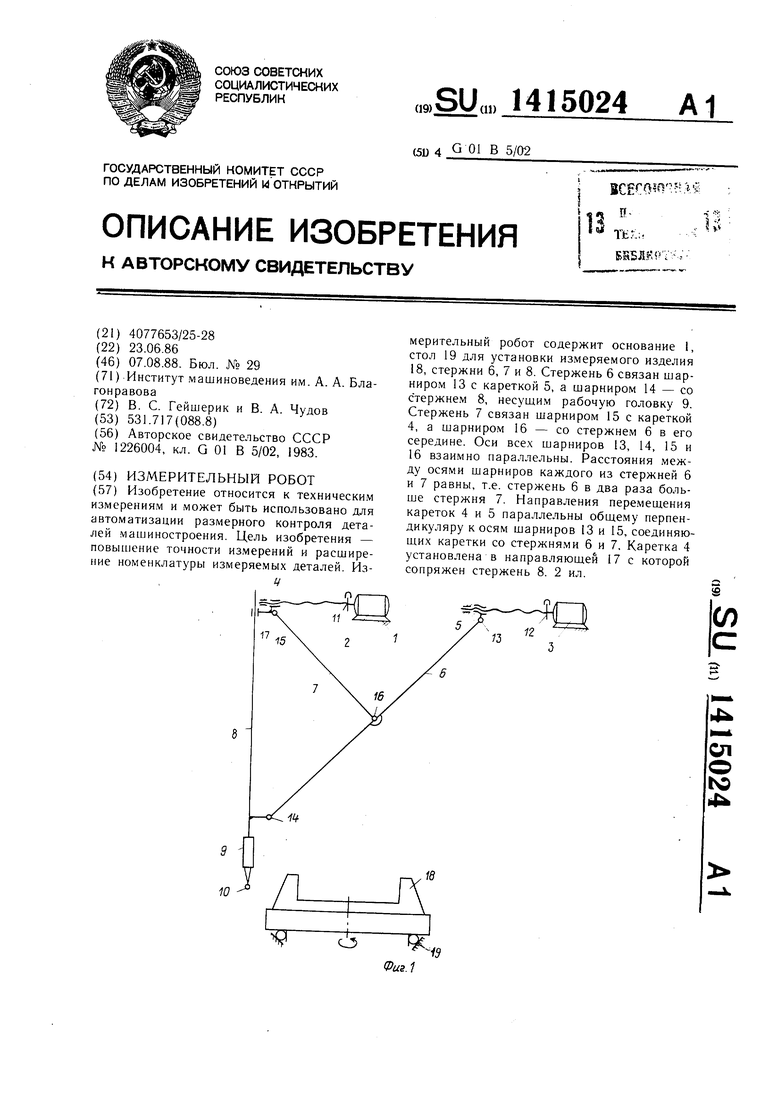
v
о
Ж
19
i Изобретение относится к техническим измерениям и может быть использовано для автоматизации размерного контроля Деталей машиностроения.
; Цель изобретения - повышение точности измерений и расширение номенклатуры из- 1меряемых деталей.
I На фиг. 1 представлена кинематическая |схема измерительного робота; на фиг. 2 |то же, вид сверху.
I Измерительный робот содержит основаIние 1, два привода, состояние из установi ленных на основа1П1и 1 двигателей 2 и 3 и
i кареток 4 и 5, два шарнирно соединенных
стержня 6 и 7, третий стержень 8, несущий
I измерительную головку 9 с наконечником it),
|И измерительные преобразователи 1 и 12
неремеп1ений головки 9. Стержень 6
HiapHHpoM 13 с кареткой 5, а шарниром 11
I со стержнем 8. Стержень 7 связан niapHupo.i
I 15 с кареткой 4, а Н1арпиром 16 - со стержI нем 6 в его середине. Оси всех П1арнирои вза1 и.мно 11арал:1е:1ьны, расстояния между осямн
шарниров вдоль стержней 6 и 7, равны.
нанравления 11ереме1цения кареток 4 и
нара, лсльны общему периенднкуляру к
niapuHpoB 13 и 15, соединяющих карегкн со
стержнями 6 и 7. На каретке 4 установ. юна
нанравляюн1ая 17, с KOTOpoi i сопряжо cicpжень 8, с возможностью его продольного по
стуг1ате, перемещения под |рям1)1м г
лом к направлению перемен1ения каретки 4
и к оси шарнира, соединяюнич о кареткх 4
со стержнем 7. Измеряемое изделие 18 sx танавливается на стол 19, при IIOMOHIH ко
Topoi o может бьггь сообщено дополшгге,ное врап1ательпое и (или) ноступате. илюс
11еремен1ение изделия 18 относительно и.чмсрительной i OJioBKH 9 робота. Поворот с;ч Г.
ней 6-8 вокруг oceii кареток нредотнрагаа
ется их несоосным расио.пожеиием в прострапстве, например, за счет расно.южеиия
каретки 4 вне плоскости чертежа. Таким же
способом (вынесением из н:к)скостя шч и
жа) обеспечивается свободпое перемеп1ение
стержни 8 в оризоита;1ьном i вертика. 1Ы1ом
направлениях.
Измерительный робот работает следук.- Ш.ИМ образом.
,-.
10
15
20
25
30
35
На стол 19 устанавливают контролируемое изделие 18. Наконечник 10 измерительной головки 9 перемегцают в плоскости измерения, перпендикулярной плоскости стола 19, и вводят в соприкосновение с поверхностью изделия. Сочетая перемеш.ения двигателей 2 и 3, управляемых от ЭВМ (не 1К)казана), перемещают наконечник 10 в требуемую точку плоскости измерения, и контролируют в заданных точках изделие 18, регистрируя ноказания измерительной головки 9 и преобразователей 11 и 12. Ориентация измерительной головки 9 во всех точках плоскости измерения сохраняется но- стоян1 ой и перпендикулярной плоскости стола 19, а перемепление головки 9 в плоскости измерения реализуется в прямоугольных (де картовыхj координатах.
Это изобретение позволяет использовать различные сменные наконечники измери- тольпо го:к)вки, в том числе и сложной (рормы, и исключает необходимость нели- нейн111х расчетов, что расширяет функциональные возможности робота, способствует повьипепию точпостп измерений, а также у кччичпвает производительность контроля. Формула изобретения
Измерите. 1ьный робот, содержащий основание. СТО.1 для установки измеряемого ИЗЛ.СЛИЯ, измерительную головку, две уста- ипв- .енные с возможностью перемешепия по основанию каретки, два стержня, шарнир- ио соединенные одними концами с соответ- с гвуюпи1ми каретками, один из стержней вгорым концом шарнирно связан с сере- ди1ил1 второго стержня и вдвое короче него, оси всех гиарниров параллельны, а направления перемешепия кареток параллельны обплему нсрпенд ику;1яру к осям шарниров кареток, отличающийся тем, что, с це,г1ью пов1Л1 ения точности измерений и расши- рср.ия нсуменклатуры измеряемых изделий, роби снабже третьим стержнем, на одном конце которого закрегимена измерительная головка, Н1арнирно соединенным со свободным концом второго стержня так, что ось этого Н1арнира п.араллельна осям других н .арпиров, а на первой каретке выполнена ааправ. третьего стержня, siepneH- дпкулирная паправлепиям перемещения кареток и паиравлениям осей шарниров.
VU2.2
| Координатная измерительная машина | 1983 |
|
SU1226004A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
