Изобретение относится к области технических измерений в машиностроении и может быть использовано при создании средств автоматизации контрольных операций.
Целью изобретения является повыше ние точно сти измерений и упрощение обработки информация
На чертеже показана кинематическая схема измерительного робота.
Измерительный робот содержит основание 15 поворотный стол 2 для размещения измеряемого изделия 3, устаноиленшлй на основании 1, две каретки 4 и 5, установленные с возможностью параллельного перемещения с помощью приводов, С кареткой 4, приво- дш .гай в движение от двигателя 6, шар ниЬно соединен концом рычаг 7. С кареткой 5, приводимой в движение от двигателя 8, шарнирно соединен одним концом рычаг 9, второй конец которого шарнирно соединен с серединой рычага 7. Оси всех шарниров взаимно параллельны и перпендикулярны направлению перемещения каретокj а пиния.J соединяющая шарниры на карет- к..г;: , паралпе)ьна Направлению их перемеш.енияо К концу рычага 7 и к несу- зо тельную головку, связанную с .вторым
цгей-вгс каретке 4 шариирно присоединены два рычага 10,, соединенные также на шарнире и образующие совместно ::. ргычагом 7 и кареткой 4 шарнирный параллелограмм. На рычаге 10, параллельном каретке 4, закреплена измерительная головка 11 и ползун 12 .датчика поперечных перемещений голов кн„ Линейная шкала 13 этого датчика, а также ползун 14 датчика продольных перемещений головки установлены на каретке 5 Шкала 15 датчика продольных перемещений закреплена на корпусе робота, соединенном с основанием i .
Измерительный робот работает сле- цующкм образом,.
Измеряемое изделие 3 с помощью стола 2 перемещают в заданные поло- в:енияо При синхронном и согласованно враш.енйи с одинаковой скоростью двиСоставитель М. Кириллов Редактор Э, Слиган Техред И,Попович
Заказ 6145/43 Тираж 677 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул„ Проектная, 4
гателей 6 и 8 каретки 4 и 5 движутся синхронно в одном направлении и перемещают измерительную головку 11 в
продольном направлении. При движении только каретки 4 обеспечивается перемещение измерительной головки 11 в поперечном направлении. При вращении двигателей 6 и 8 с изменением скороетей по определенной программе измерительная головка может совершать сложные перемещения в плоскости измерения вдоль контура измеряемого изделия 3, Информация о перемещениях из
мерительной головки 11 вьщается дат- чиками продольных и поперечньк перемещений и поступает в ЭВМ (не показана) для дальнейшей обработки.
20
Формула изобретения
Измерительный робот,, содержащий основание, стол для измеряемого изделия, две каретки, установленные с возможностью параллельного перемещения с помощью приводов, установленных на основании, датчики перемеще- НИИ,рычаг, шарнирно соединенный одним концом с одной из кареток, изнери5
0
5
0
концом рычага, и стержень, шарнирно связанный концами с второй кареткой и с серединой рычага, оси всех шар- . ниров взаимно параллельны и перпендикулярны направлениям перемещения кареток, а линия, соединяющая шарниры на каретках, параллельна направлению их пере{ ещения5 отличающийся тем, что., с целью повышения точности измерений и упрощения обработки информации, он снабжен двумя дополнительными стержнями, образующими вместе с первой кареткой и рычагом шарнирный параллелограмм, измерительная головка закреплена на дополнительном стержне, связанном с ры- чагом, а датчик перемещений головки выполнен , в виде закрепленного на ней ползуна и установленной на второй ка-- ретке линейной шкапы, сопряженной с ползуном.
Корректор А. Зш юкосов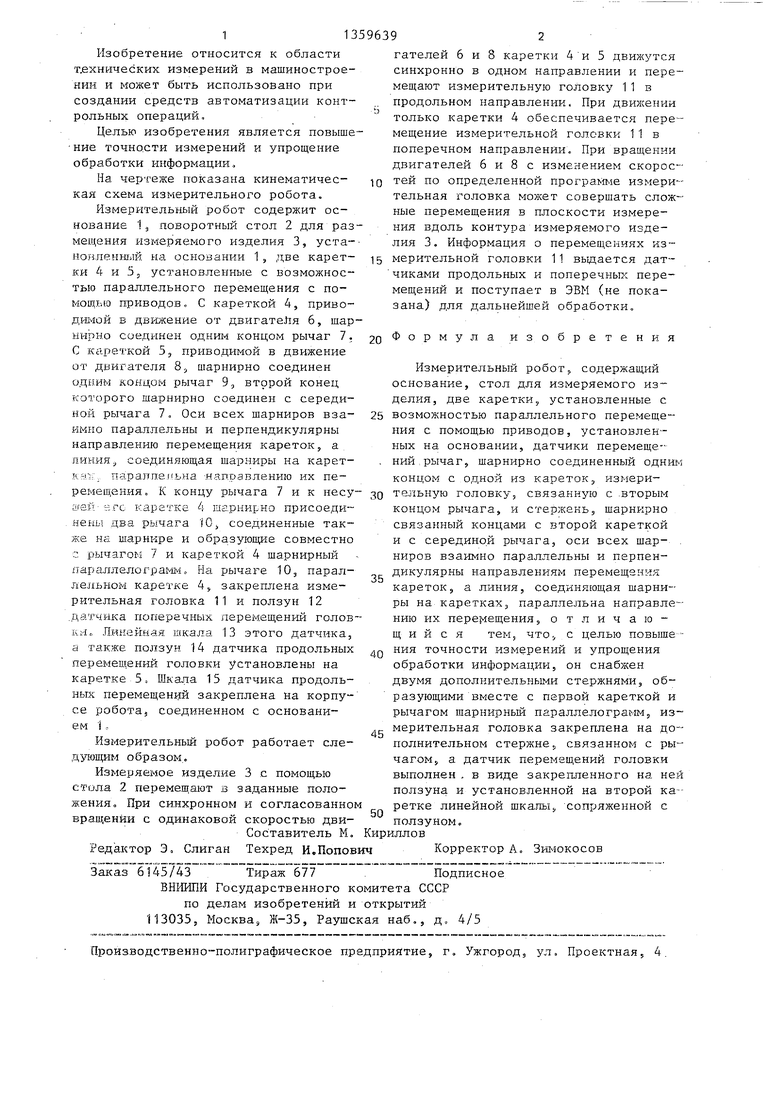
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный робот | 1986 |
|
SU1415024A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| ПРОМЫШЛЕННЫЙ ГИБРИДНЫЙ РОБОТ ДЛЯ ЛАЗЕРНОЙ ТЕХНОЛОГИИ | 2023 |
|
RU2817720C1 |
| Устройство для сортировки цилиндрических изделий | 1985 |
|
SU1482738A1 |
| Устройство для измерения линейных размеров | 1991 |
|
SU1827522A1 |
| ВЫСОКОСКОРОСТНОЙ МЕТАЛЛОРЕЖУЩИЙ ПЯТИКООРДИНАТНЫЙ ЦЕНТР С ТРИПОД-МОДУЛЕМ | 2005 |
|
RU2285602C1 |
| СТАНОК ДЛЯ ПРОДОЛЬНОЙ РАСПИЛОВКИ БРЕВЕН | 1992 |
|
RU2028935C1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ С ЧИСЛОВЫМ ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2706244C1 |
| Устройство для вырубки заготовок из полосового и ленточного материала | 1979 |
|
SU856834A1 |
Изобретение относится к области технических измерений в маи инострое- нии. Целью изобретения является повы- ние точности измерений к упрощение обработки информации. Измерительный робот содержит поворотный стол 2 для размещения измеряемого изделия 3 и две каретки 4 и 5, перемещающиеся параллельно с помощью приводов. На каретке 4 закреплен одним концом-шарнирный параллелограмм, содержащий рычаги 7 и 10. На противоположной стороне параллелограмма закреплена измерительная головка 1 1 , привод 1мая в контакт с измеряемым изде1и-;ем. На каретке 5 закреплен шарнирно одним концом рычаг 9, соедикенньш вторым концом с серединой рычага 7. При синхронном и согласованном вращении с одинаковой скоростью двигателей 6 и 8 приводов каретки 4 и 5 перемещают измерительную головку 11 в продольном направлении., Зти перемещения измеряются датчиком продольных перемещений. При движении только каретки 3 измерительная головка 11 перемещается в поперечном направлении. Это перемещение лз:- еряется датчиком поперечных перемещений. При вращении двигателей по огогделенкой программе измерительная головка 11 совершает сложные перемез,ания в плоскости измерения вдоль контура измеряемого изделия 3, устанавливаемого с помощью стола 2 в заданное положение. 1 ил. tssssja fS
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Координатная измерительная машина | 1983 |
|
SU1226004A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
