а ||
КО
1lA
Изобретение относится к. текстильной и бумагоделательной промьпилен- ности,
Цель изобретения - повышение точности регулирования путем обеспечения инвариантности к изменениям нагрузки.
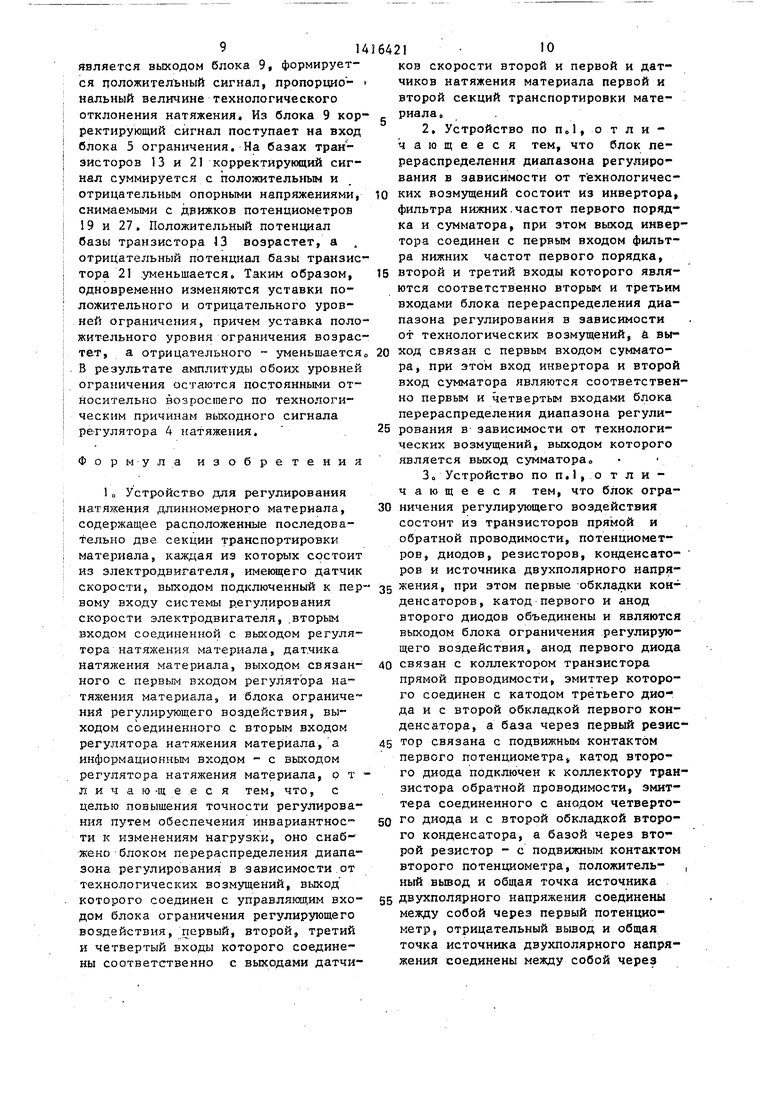
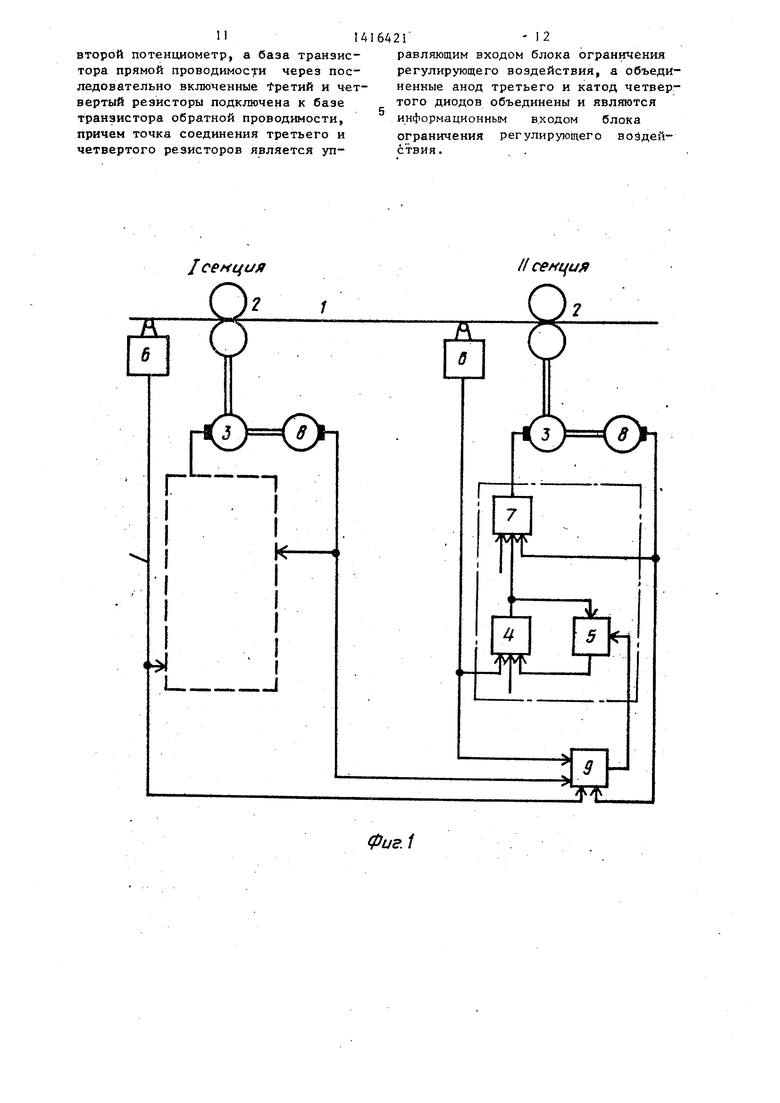
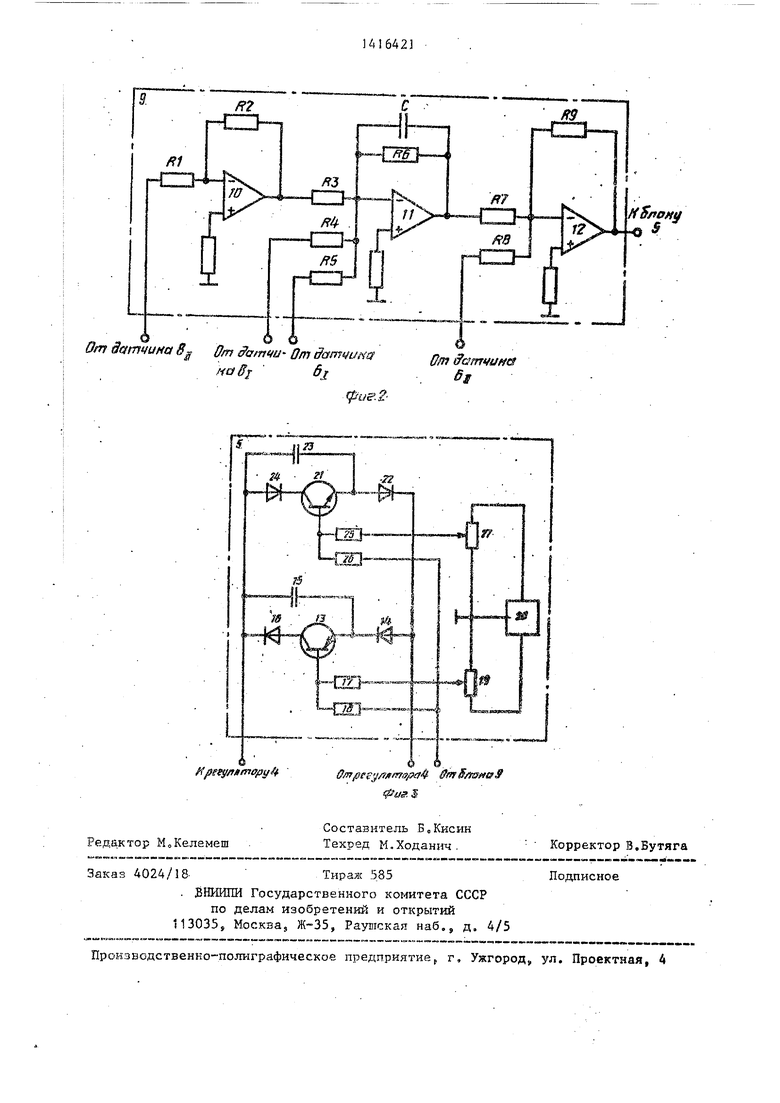
На фиГо показана блок-схема устройства; на фиг,2 - принципиальная схема блока перераспределения диапазона регулирования в зависимости от технологических возмущений; на фиг. 3 - принципиальная схема блока ограничения регулирующего воздействия,.
Устройство состоит из двух расположенных последовательно секций транспортировки материала 1, Каждая секция включает .механизм 2 транспортировки, соединенный с электродвигателем 3, и последовательно включенные регулятор 4 натяжения материала с блоком 5 ограничения регулирующего воздействия,соединенным, одним входом с выходом регулятора 4 натяжения, а выходом с входом регулятора 4 натяжения, и подключенным к входу регулятора 4 натяжения датчиком 6 натяжения, систему 7 регулирования скорости электродвигателя 3 с подключенным к ее входу датчиком 8 скорости. Устройство содержит блок 9 перераспределения диапазона регулирования в зависимости от технологических возмущений, выход которого подключен к входу блока 5 ограничения, первый, вход - к датчику 8 скорости второй сек1ЩИ,вто- р.ой вход - к датчику 8 скорос.ти первой секции, третий вход - к датчику 6 натяжения первой секции, а четвертый вход - к датчику 6 натяжения второй секции
Блок 9 содержит последовательно включенные инвертор 10, фильтр 11 нижних частот первого порядка и сумматор 12, причем вход инвертора 10, второй и третий входы фильтра i1 нижних частот и второй вход сумматора 12 являются соответствующими входами блока 9, а выход сумматора 12 является выходом блока 9
Блок .5 ограничения содержит первый транзистор 13 прямой проводимости, эмиттер которого соединен с катодом диода 14 и обкладкой конденсатора 15, коллектор - с анодом диода 16, а база - с резисторами 17 и 18, при этом свободный вьшод резистора 17 соединен с подвижньм контактом.(движ 2.
ком) потенциометра 19, один вьюод которого подключен к положительному вьшоду источника 20 двухполярного напряжения; транзистор 21 обратной проводимости, эмиттер которого соединен с анодом диода 22 и обкладкой конденсатора 23, коллектор - с катодом диода 24, а база - с резисторами 25 и 26, при этом свободный вывод резистора 25 соединен с движком потенциометра 27, один вывод которого подключен к отрицательному выводу источника 20 двухполярного напряже- ,
ния, а второй вьшод соединен с вторым вьшодом потенциометра 19 и подключен к общей точке источника 20 двухполярного напряжения.
Устройство работает следующим образом, .
Натяжение бумажного полотна в межсекционном промежутке между I и II секциями создается разностью скоростей данных секций и зависит от величины натяжения полотна, транспортируемого из предыдущего межсекционного промежутка и параметров технологического процесса в технологической зоне I секции, т.е,
I
5
.
„i- Kvt
KV2
-fp.;T
. - A,
ЛМ
О
+ uq5
техн
(1)
0
5
0
5
где iCf, UM, -.приращения относительных значений натяжений бумажного полотна соответственно во II и I секциях;
К,Ку, - относительные значения коэффициентов передачи бумажного полотна;
Tj постоянная времени
деформации бумажного полотна;
L, - расстояние свободного хода бумажного полотна между I и II секциями;V - скорость II секции;
Л-, , Л О приращения относительных значений скоростей I и II секций; Ч текн приращение относительного значения откло-п нений натяжения;
3141642
- оператор дифференцирования.
Переходя в уравнении (1) от приращений и относительных величин к их абсолютным значениям, получим
г
. .-.
. 4К.у,
; в межсекционном I и II секциями
X F, + Рте,(2)
где F- и FTUXH соответственно заданное значение натяжения и его отк-i лонение от заданного.
Процессы регулирования натяжения в электроприводе бумагоделательной машины осуществляются таким образрм Регулятор 4 натяжения включается в работу после . заправки бумажного полотна I и установления заданной величины натяжения F, промежутке между
при помощи подрегулировки скоростей V и V секций, ограничивакнцих данный промежуток Выходной.сигнал регулятора и натяжения описывается уравнением
) изн(Р) - UM(P) X W,(P). где (Р) - напряжение задания; ЛН(Р) напряжение датчика 6
натяжения;
W., (Р) передаточная функция регулятора А натяжения,
При включении регулятора 4 натяжения в работу его выходной. сигнал устанавливается равным нулю, т,е. U/jfi (р) О, В процессе работы натяжение бумажного полотна подвергается воздействию различных возмущений, основными из которых являются изменения момента нагрузки секции Л М, и технологические отклонения натяжения
F
теки
в I секциио Регулятор 4 натяжения обрабатывает указанные возмущения, форми руя сигнал управления ирц(Р} для подрегулировки скорости Vj второй секции
Ограничение выходного сигнала регулятора 4 натяжения служит для того, чтобы изменение задающего натяжения сигнала (Р) во II секции не оказывало существенного влияния на электропривод последующей смежной секции. Выходной сигнал регулятора 4 н-атяже- ния должен быть не более, чем
(3)
и ;; oi-e-,- и
зн. макс
где об 3-4 - коэффициент форсировки;
- относительное удлине- ние материала;
5| - относительная скорость I секции; и,,, „-„, - максимальное значе7Н
ние задающего напря- жениЯо
Для обеспечения линейности систе- мы при обработке возмущений по моменту нагрузки секции fiM максимальный сигнал регулятора натяжения дол- жен удовлетворять условию
Т(М
/ Т.
и;: -r- P- f c.a.c . W
f
где 6,3 (пи-регулятор); р 4,4 (П-регулятор) - коэффициент , зависящий от типа регулятора натяжения;
Т „, - малая постоянная времени
контура тока;
- электромеханическая постоянная времени;
/U - относительное значение активного сопротивления якорной цепи;
Кремоне относительная величина максимального изменения момента нагрузки . При невозможности одновременного соблюдения неравенств (3) и (4} вели- чина ограничения выходного .сигнала регулятора 4 натяжения выбирается из условия (А), обеспечивающего линейность системы при возмущениях по моменту нагрузки йМ,
Выходной сигнал регулятора 4 натяжения ограничивают блоком 5 ограничения. Для этого устанавливают заданные положительный и отрицательный уровни ограничения -в блоке 5 ограничения
Нестабильность во времени параметров технологического процесса вызывает технологические отклонения натяжения , которые, отрабаты- ваясь регулятором 4 натяжения, смещают его рабочую точку с нуля не ве
личину д и р„ t /i р F
техн
V -АЧ
где |3 р, - коэффициент усиления регулятора 4 натяжения; К дц - коэффи- 5 циент передачи датчика 6 натяжения. В результате положительный и отрицательный уровни ограничения оказьЕвают- ся несимметричными относительно вы-г ходного сигнала Upv, регулятора 4
натяжения, причем один из уровней ограничения становится меньше требуемого. Это приводит к линейности системы вследствие насьщения регулятора 4 натяжения при возмущениях по моменту нагрузки ЛМ,.. Контур регулирования натяжения размьгкается, в результате снижается точность и быстродействие системы, а низкий уровень ограничения ± , и достаточно большой коэффициент усиления В р ре гулятора 4 натяжения, как следствие, приводит к неработоспособности системы регулирования натяж ения.
Для устранения згказанных недостатков необходимо измерять отклонения натяжения и по полученным сигналам и пор перестраивать установку уровня ограничения регулятора 4 натяжения,Поскольку технологические отклонения натяжения недоступны прямому измерению, то для их определения использован косвенный метод. Технологические отклонения натяжения те(н определяют по модели объекта регулирования (бумажного полотна), беря за основу уравнение (2)„ Разность скоростей секций UV V - V, и натяжение из предьщущего межсекциокного промежутка F, подаются на аналоговую модель бумажного полотна. Вычитая из выходного сигнала объекта регулирования выходной сигнал модели, имеем
Wop(P)
к
&v(t)
+ ---
к
VI
- W,
F.(t) (P)/.V(t)
+ F 1
теки
К
А,Н7
де
Wop(P)
KV,
KVZ
F
,(t).
(5)
передаточная функция объекта регулирования (бумажного полотна); Если выбрать передаточную функцию
модели лучим
л.и
мод(Р)
Wop (Р);
К
дна
то по(t) F,,,, (t) К,
(6)
пор VO/ - - ч,.; ЧН2
Для определения технологических отклонений натяжения F. по уравнению (2) необходимо выполнять операции вычитания и усиления со сдвигом по фазе о
Принципиальная схема блока 9 соответствует принятой в системе УБСР-АИ
еиье , ,1416421 6 . .
полярности сигналов обратных связей. Инвертирующий усилитель 10 изменяет полярность сигнала V датчика 8 скорости II секции для получения раз
10
НОСТИ o,V Vi - Vj. Фильтр нижних частот первого порядка, являясь моделью бумажного полотна 1, преобразует указанную разность и сигнал. F датчика 6 натяжения I секции в сигнал F , соответствующий натяжению бумажного полотна 1 в межсекционном промежутке между I и II секциями.
8инвертирующем сумматоре 12 из сиг15 нала F- датчика 6 натяжения II
ции вычитается сигнал модели F , ,
Полученная разность U представляет собой величину, пропорциональную технологическим отклонениям натяжения
т ,
Емкость конденсатора и сопротивления резисторов отдельных узлов блока
9связаны с параметрами электропривода 3 соотношениями;
С1 R 1 - R 2; R 3. R 4; R 6 R 4 KV. К, R 5 К 620
25
30
35
40
45
50
KV. К,
R.8 R 9.
55
Д.нг
Vi Определенный таким образом в блоке 9 сигнал uU(t) поступает на вход блока 5 ограничения и перестраивает положительный и отрицательный уровни ограничения выходного сигнала регулятора 4 натяжения„ Положительный и отрицательный уровня ограничения выходного сигнала Up( регулятора 4 натяжения устанавливаются в блоке 5 опорными напряжениями, снимаемыми с движков потенциометров 19 и 27 и запирающими соответствующие транзисторы 13 и 21. При превышении выходным сигналом регулятора 4 натяжения установленного опорного напряжения данной полярности соответствующий транзистор открьшается, а избыток выходного сигнала Up, регулятора 4 натяжения в .качестве отрицательной обратной связи поступает на вход регулятора 4 натяжения , т « е „ выходной сигнал Upj, регулятора 4 натяжения огранкчив ает- ся блоком 5 ограничения на заданном уровне.
Корректирующий сигнал (iU(t) с выхода блока 9 поступает на базы транзисторов 13 и 21 и, суммируясь здесь с соответствующими опорными напряжениями, перестраивает одновременно положительный и отрицательный уровни ограничения При этом оба
714
уровня ограничения перестраиваются в сторону одной полярности, которая соответствует полярности корректирующего сигнала &U(t), осуществляется параллельный сдвиг обоих уровней ограничения.
Однако если на одном из транзисторов модуль корректирующего сигнала uU(t) оказывается больше модуля, противоположного ему по знаку запирающего опорного напряжения, то этот транзистор открывается и шунтирует вход регулятора 4 натяжения с его выходом. Поэтому в коллекторные цепи транзисторов 13 и 21 включены -ограничивающие диоды 16 и 24, которые; не препятствуя процессу ограничения, устраняют указанный недостаток.
Датчиками 6 натяжений и датчика- ми 8 скоростей I и II секций измеряют натяжения материала перед этими секциями и их скорости Измеренный сигнал натяжения перед II секцией вычитают из заданного на входе регулятора 4 натяжения этой секции. По полученной разности в регуляторе 4 натяжения II секции формируют сигнал управления скоростью электропривода этой секции о Одновременно блоком 5 ограничения устанавливают заданные положительный и отрицательный уровни ограничения для формируемого на выходе регулятора 4 натяжения сигнала управления Для этого в.блоке 5 ограничения потенцио метрайи, 19 и 27 устанавливают заданные положительное, и отрицательное опорные напряжения„ Однрвременно в блоке 9 определяют величину технологических отклонений натяжения„ Для . этого на первый вход блока 9 подают сигнал датчика 8 скорости II секции, на второй вход - сигнал датчика- 8 скорости I секции, на третий вход - сигнал датчика 6 натяжения I секции, а на четвертый вход - сигнал датчика б натяжения II секции. В блоке 9 сигнал датчика 8 скорости II секции инвертируют инвертирующим усилителем 10 и вычитают из сигнала датчика 8 скорости I секции на входе фильтра 11 нижних частот первого порядка. На третий вход фильтра 11 подают сигнал датчика 6 натяжения I секции. Указанные сигналы преобразуют фильтром 11 нижних частот. Из ползгченного результата вычитают сигнал датчика 6 натяжения II секции.
64218
для чего подают выходной сигнал фильтра 11 на первый вход, а сигнал датчика 6 натяжения II секции - на второй вход инвертирующего сумматора 12, Выходной сигнал сумматора 12, пропорциональный величине технологических отклонений натяжения, является выходным сигналом блока 9, СфорQ мированный таким образом корректи- р ующий сигнал с выхода блока 9 подают на второй вход блока 5 ограничения и этим сигналом перестраивают положительны и отрицательный уровни
16 ограничения выходного сигнала регулятора 4 натяжения II секции,
Если технологические отклонения натяжения отсутствуют, то корректирующий сигнал на выходе блока 9 ра0 вен нулю, а установленные положительный и отрицательный уровни ограничения выходного сигнала регулятора 4 натяжения соответствуют опорным напряжениям, установленным потенцио25 метрами 19 и 27 блока 5 ограничения, Рассмотрим работу устройства при отклонении натяжения по технологическим причинам. Например, увеличение натяжения в межсекционном промежутке
30 между I и II секциями по технологическим причинам вызывает возрастание си-гнала датчика 6 натяжения II секции Разность сигналов задания и датчика 6 натяжения II секции на
3g входе регулятора 4 натяжения становится отрицательной. На выходе регулятора 4 натяжения появляется положительный сигнал, который -поступает на вход системы 7 регулирования ско40 рости и уменьшает скорость электропривода II секции, что приводит к восстановлению натя жения с заданной точностью. При этом сигнал датчика 6 натяжения II секции восстанавли45 вается на прежнем уровне, а сигнал датчика 8 скорости этой секции уменьшается. Одновременно сигналы с датчиком 8 скоростей и с датчиков 6 - натяжений I и II секций подаются
50 на блок 9, Уменьшение по абсолютной величине сигнала датчика 8 скорости II секции приводит к уменьшению разности сигналов скоростей I и II секций на входе фильтра 11 нижних час55 тот. Положительный выходной сигнал фильтра 11 уменьшается и на входе инвертирующего сумматора 12 появляется отрицательный сигнал, Нг выходе сумматора 12, который одновременно
91
является выходом блока 9, формируется положительный сигнал, пропорцио- нальный величине технологического отклонения натяжения. Из блока 9 корректирующий сигнал поступает на вход блока 5 ограничения. На базах транзисторов 13 и 21 корректирующий сигнал суммируется с положительным и отрицательньм опорными напряжениями, снимаемыми с дрижков потенциометров 19 и 27. Положительный потенциал базы транзистора 13 возрастет, а отрицательный потенциал базы транзистора 21 .уменьшается. Таким образом, одновременно изменяются уставки положительного и отрицательного уровней ограничения, причем уставка положительного уровня ограничения возрас тет, а отрицательного уменьшается В результате амплитуды обоих уровней ограничения остаются постоянными относительно возросшего по технологическим причинам выходного сигнала регулятора 4 натяжения.
Формула изобретения
1„ Устройство для регулирования
натяжения длинномерного материала, содержащее расаоложенные последовательно две секции транспортировки материала, каждая из которых состоит из электродвигателя, имеющего датчик скорости, выходом подключенный к пер вому входу системы регулирования скорости электродвигателя, .вторым входом соединенной с выходом регуля тора натяжения материала, датчика натяжения материала, выходом связанного с первым входом регулятора натяжения материала, и блока ограниче НИИ регулирующего воздействия, выходом соединенного с вторым входом регулятора натяжения материала, а информационным входом - с выходом регулятора натяжения материала, Р т л и ч а ю -щ е е с я тем, что, с целью повышения точности регулирования путем обеспечения инвариантности к изменениям нагрузки, оно снабжено -блоком перераспределения диапазона регулирования в зависимости от технологических возмущений, выход которого соединен с управляющим входом блока ограничения регулирующего воздействия, первый, второй, третий и четвертый входы которого соединены соответственно с выходами датчи1 10
ков скорости второй и первой и датчиков натяжения материала первой и второй секций транспортировки материала, .
2, Устройство по По 1, от л и - чающееся тем, что блок перераспределения диапазона регулирования в зависимости от технологических возмущений состоит из инвертора, фильтра нижних.частот первого порядка и сумматора, при зтом выход инвертора соединен с первым входом фильтра нижних частот первого порядка,
второй и третий входы которого являются соответственно вторым и третьим входами блока перераспределения диапазона регулирования в зависимости от технологических возмущений, & вы51од связан с первым входом сумматора, при этом вход инвертора и второй вход сумматора являются соответственно первым и четвертым входами блока перераспределения диапазона регулирования в зависимости от технологических возмущений, выходом которого является выход сумматора 3о Устройство по П.1, о т л и - чающееся тем, что блок ограничения регулирующего воздействия состоит из транзисторов прямой и обратной проводимости, потенциометров, диодов, резисторов, конденсаторов и источника двухполярного напряжения, при этом первые обкладки конденсаторов, катод первого и анод второго диодов объединены и являются выходом блока ограничения регулирующего воздействия, анод первого диода
связан с коллектором транзистора прямой проводимости, змиттер которого соединен с катодом третьего диода и с второй обкладкой первого конденсатора, а база через первый реэистор связана с подвижным контактом первого потенциометра, катод второго диода подключен к коллектору транзистора обратной проводимости, эмиттера соединенного с анодом четверто-
го диода и с второй обкладкой второго конденсатора, а базой через второй резистор - с подвижным контактом второго потенциометра, положитель- , ный вьгоод и общая точка источника
двухполярного напряжения соединены между собой через первый потенциометр, отрицательный вьшод и общая точка источника двухполярного напряжения соединены между собой через
11141
второй потенциометр, а база транзистора прямой проводимости через последовательно включенные третий и четвертый резисторы подключена к базе транзистора обратной проводимости, причем точка соединения третьего и четвертого резисторов является уп642Г- 12
равляющим входом блока ограничения регулирующего воздействия, а объединенные анод третьего и катод четвертого диодов объединены и являются информационным входом блока ограничения регулирующего воздействия . . .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения длинномерного материала | 1988 |
|
SU1701618A2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2203997C1 |
| Устройство для регулирования натяжения материала в многосекционной непрерывно-поточной линии | 1988 |
|
SU1664712A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Устройство для управления генератором | 1976 |
|
SU744458A1 |
| Устройство для автоматического регулирования технологического параметра,преимущественно влажности бумажного полотна | 1986 |
|
SU1416582A1 |
| Устройство для управления намоткой нитевидного материала | 1982 |
|
SU1096183A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Устройство для автоматического регулирования технологического параметра | 1981 |
|
SU1052600A1 |
| Система регулирования диаметра жил на бумагомассной машине | 1986 |
|
SU1472879A1 |
Изобретение относится к текстильной и бумагоделательной промьш- ленностио Цель изобретения - повышение точности регулирования путем обеспечения инвариантности к изменениям нагрузки Отличительной особенностью устройства является наличие в нем блока перераспределения, диапазона регулирования в зависимости от технологических возмущений. При появлении отклонения натяжения от заданного значения происходит автоматическая перестройка уровйей раничения выходного сигнала регуля- . тора натяжения с .сохранением симметричного диапазона регулирования, 2 з.По ф-лы, 3 ил. с « W
6
JFE.
ФигЛ
Ощ dcfmt/ина 8g От ffamw От damw. sf ffamwMts
naSf6jfBS
(риг.22Э
I n г
нь
V s
S
yf
| Шестаков В,М„ Регулируемые электроприводы отделочных агрегатов целлюлозно-бумажной промьшшенн.ости, М,: Лесная промьшшенность, 1982, с | |||
| Крутильная машина для веревок и проч. | 1922 |
|
SU143A1 |
