Изобретение относится к устройствам регулирования натяжения движущегося ленточного материала на непрерывно-поточных агрегатах, в частности к регулированию натяжения бумажного полотна на бумагоделательных машинах, и является дополнительным к авт.св. № 1416421.
Целью изобретения является повышение точности устройства путем обеспечения инвариантности к изменениям нагрузки.
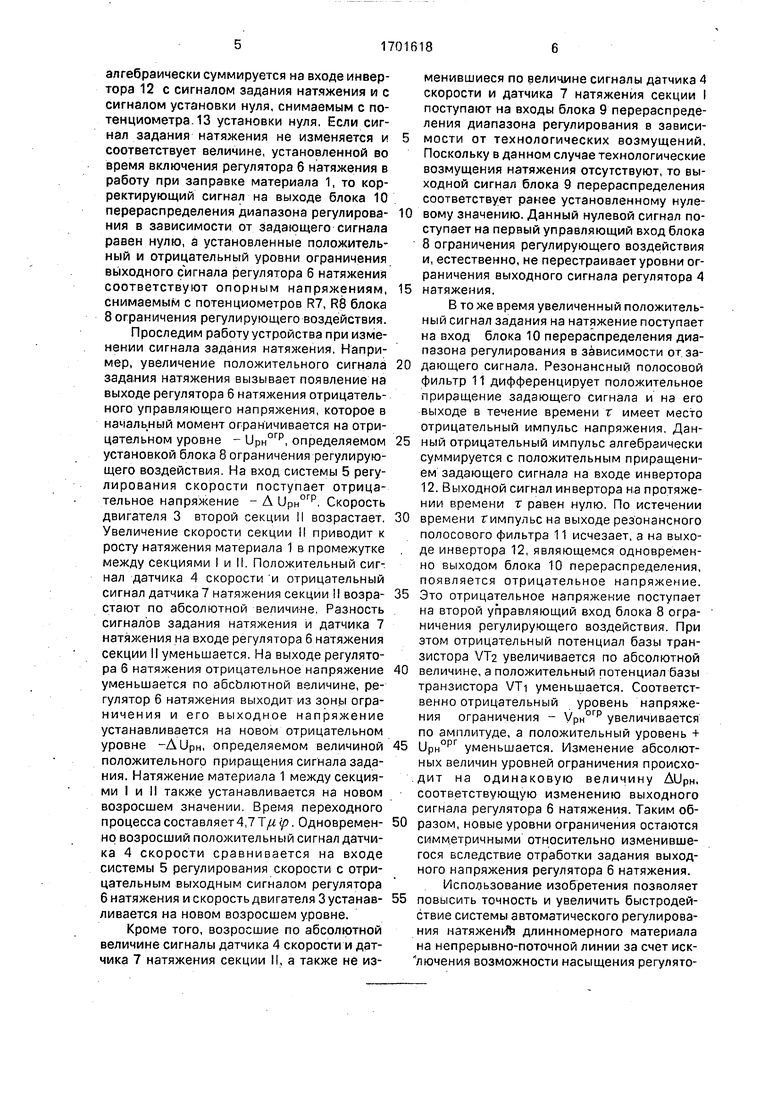
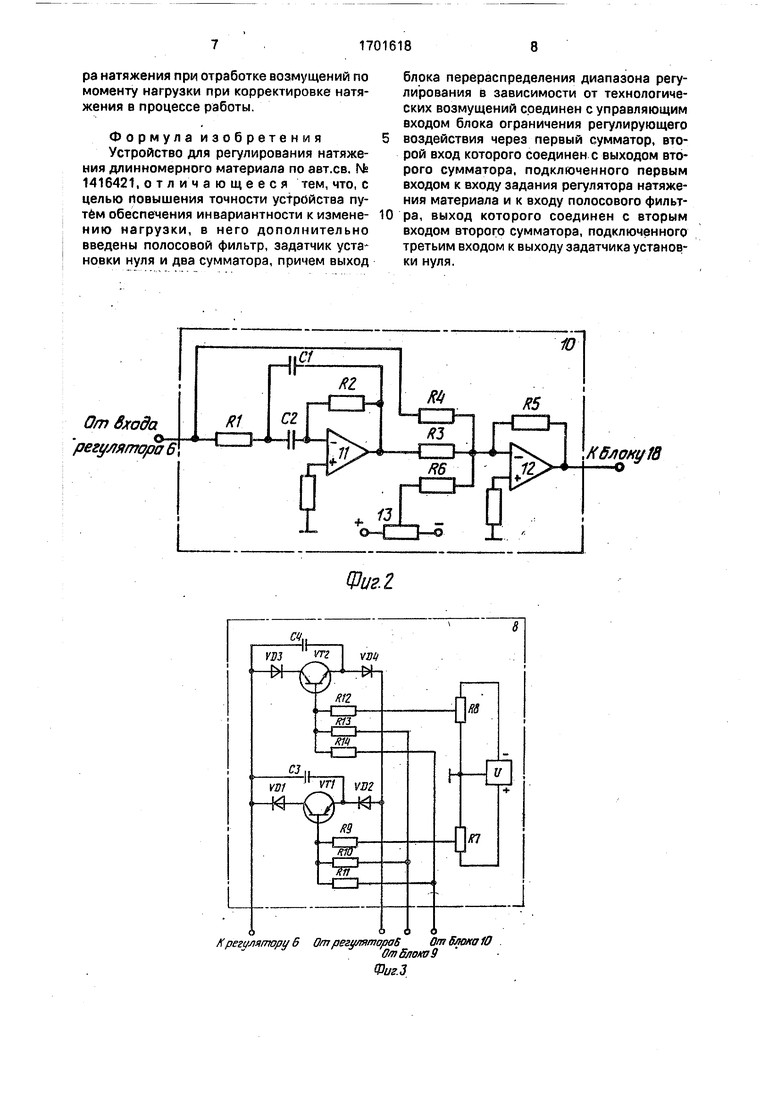
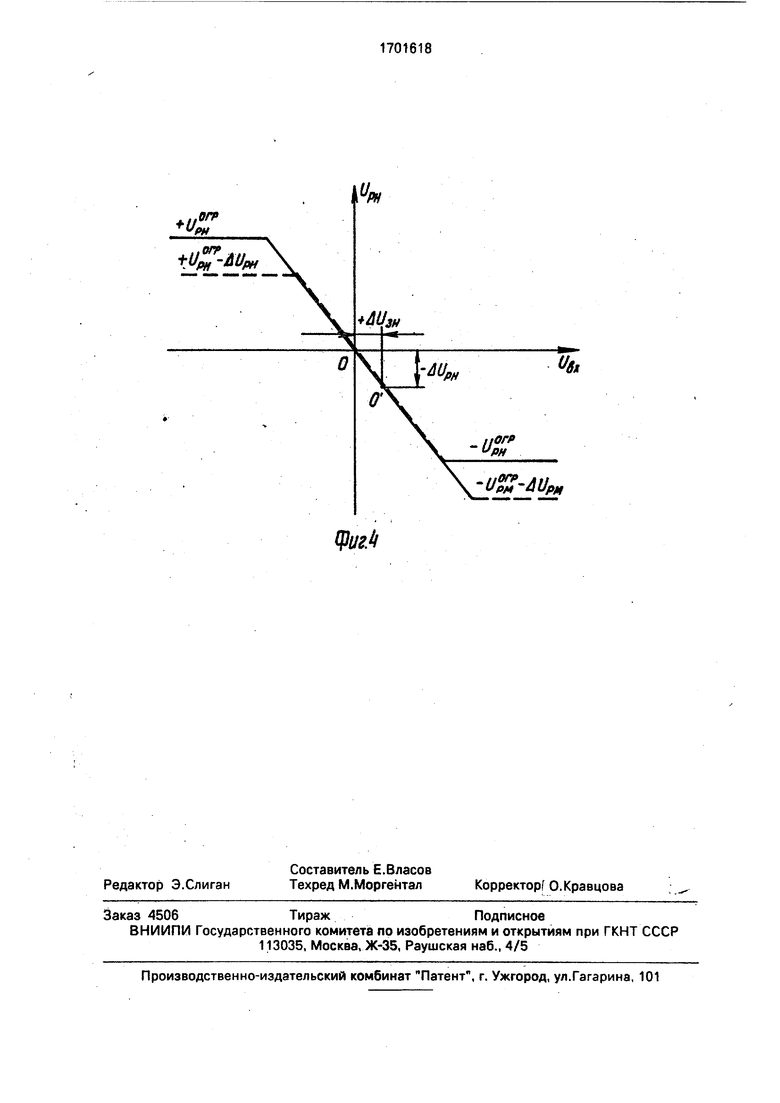
На фиг,1 представлена функциональная схема устройства; на фиг.2 - принципиальная схема блока перераспределения диапазона регулирования в зависимости от задающего сигнала; на фиг.З - принципи- альная схема блока ограничения регулирующего воздействия; на фиг.4 характеристика вход - выход регулятора натяжения.
Устройство для регулирования натяже- ния длинномерного материала 1 содержит расположенные последовательно две секции I и II транспортировки материала 1, каждая из которых состоит из механизма 2 и электродвигателя 3, датчик 4 скорости, систему 5 регулирования скорости электродвигателя, регулятор 6 натяжения материала, датчик 7 натяжения материала, блок 8 ограничения регулирующего воздействия. Вторая секция II содержит также блок 9 перераспределения диапазона регулирования в зависимости от технологических возмущений, блок 10 перераспределения диапазона регулирования в зависимости от задающего сигнала, состоящий из полосе- вого фильтра 11, сумматора 12 (инвертора), задатчика 13 установки нуля (потенциометра), а также содержит сумматор 14.
Устройство работает следующим образом.
Датчики 4 скорости и датчики 7 натяжения измеряют скорости секций I и II и натяжение материала 1 перед этими секциями. На входе системы 5 регулирования скоро
сти сигнал датчика 4 скорости вычитается из заданного значения скорости. На входе регулятора б натяжения сигнал датчика 7 натяжения вычитается из заданного значения натяжения. По полученной разности регулятор 6 натяжения формирует сигнал управления для системы 5.регулирования скорости. Этим обеспечивается поддержание заданной величины натяжения, Одновременно в блоке 8 ограничения регулирующего воздействия устанавливаются требуемые поло- жительный и отрицательный уровни ограничения для формируемого на выходе регулятора 6 натяжения сигнала управления. Для этого в блоке 8 ограничения регулирующего воздействия потенциометрами R7, R8 устанавливаются соответствующие опорные напряжения Одновременно блок 9 перераспределения диапазона регулирования в зависимости от технологических возмущений формирует по сигналам датчиков 4 скорости и датчиков 7 натяжения материала секции I и II корректирующий сигнал, который поступает на первый управляющий вход блока 8 ограничения регулирующего воздействия. Этот сигнал перестраивает уровни ограничения выходного сигнала регулятора 6 натяжения таким образом, чтобы они были симметричны по отношению к изменяющемуся вследствие технологических возмущений выходному сигналу регулятора 6 натяжения. Одновременно блок 10 перераспределения диапазона регулирования в зависимости от задающего сигнала формирует корректирующий сигнал, который поступает на второй управляющий вход блока 8 ограничения регулирующего воздействия. Для этого на вход блока 10 перераспределения диапазона регулирования в зависимости от задающего сигнала поступает сигнал задания натяжения, Этот сигнал в блоке 10 перераспределения дифференцируется резонансным полосовым фильтром 11 и
алгебраически суммируется на входе инвертора 12 с сигналом задания натяжения и с сигналом установки нуля, снимаемым с потенциометра 13 установки нуля, Если сигнал задания натяжения не изменяется и соответствует величине, установленной во время включения регулятора 6 натяжения в работу при заправке материала 1, то корректирующий сигнал на выходе блока 10 перераспределения диапазона регулирования в зависимости от задающего сигнала равен нулю, а установленные положительный и отрицательный уровни ограничения выходного сигнала регулятора 6 натяжения соответствуют опорным напряжениям, снимаемым с потенциометров R7, R8 блока 8 ограничения регулирующего воздействия.
Проследим работу устройства при изменении сигнала задания натяжения, Например, увеличение положительного сигнала задания натяжения вызывает появление на выходе регулятора 6 натяжения отрицательного управляющего напряжения, которое в начальный момент ограничивается на отрицательном уровне - UpH°rp, определяемом установкой блока 8 ограничения регулирующего воздействия. На вход системы 5 регулирования скорости поступает отрицательное напряжение - A UpHorp, Скорость двигателя 3 второй секции II возрастает. Увеличение скорости секции II приводит к росту натяжения материала 1 в промежутке между секциями I и II. Положительный сигнал датчика 4 скорости и отрицательный сигнал датчика 7 натяжения секции II возрастают по абсолютной величине, Разность сигналов задания натяжения и датчика 7 натяжения на входе регулятора 6 натяжения секции II уменьшается. На выходе регулятора б натяжения отрицательное напряжение уменьшается по абсолютной величине, регулятор б натяжения выходит из зоны ограничения и его выходное напряжение устанавливается на новом отрицательном уровне -Д1)рн, определяемом величиной положительного приращения сигнала задания. Натяжение материала 1 между секциями I и II также устанавливается на новом возросшем значении. Время переходного процесса составляет 4,7 Т/и р. Одновременно возросший положительный сигнал датчика 4 скорости сравнивается на входе системы 5 регулирования скорости с отрицательным выходным сигналом регулятора 6 натяжения и скорость двигателя 3 устанавливается на новом возросшем уровне.
Кроме того, возросшие по абсолютной величине сигналы датчика 4 скорости и датчика 7 натяжения секции II, а также не изменившиеся по величине сигналы датчика 4 скорости и датчика 7 натяжения секции I поступают на входы блока 9 перераспределения диапазона регулирования в зависимости от технологических возмущений. Поскольку в данном случае технологические возмущения натяжения отсутствуют, то выходной сигнал блока 9 перераспределения соответствует ранее установленному нулевому значению. Данный нулевой сигнал поступает на первый управляющий вход блока 8 ограничения регулирующего воздействия и, естественно, не перестраивает уровни ограничения выходного сигнала регулятора 4
натяжения,
В то же время увеличенный положительный сигнал задания на натяжение поступает на вход блока 10 перераспределения диапазона регулирования в зависимости от задающего сигнала. Резонансный полосовой фильтр 11 дифференциоует положительное приращение задающего сигнала и на его выходе в течение времени г имеет место отрицательный импульс напряжения. Данный отрицательный импульс алгебраически суммируется с положительным приращением задающего сигнала на входе инвертора 12. Выходной сигнал инвертора на протяжении времени т равен нулю. По истечении
времени гимпульс на выходе резонансного полосового фильтра 11 исчезает, а на выходе инвертора 12, являющемся одновременно выходом блока 10 перераспределения, появляется отрицательное напряжение.
Это отрицательное напряжение поступает на второй управляющий вход блока 8 ограничения регулирующего воздействия. При этом отрицательный потенциал базы транзистора увеличивается по абсолютной
величине, а положительный потенциал базы транзистора VTi уменьшается. Соответственно отрицательный уровень напряжения ограничения - VpH°rp увеличивается по амплитуде, а положительный уровень +
ирнорг уменьшается. Изменение абсолютных величин уровней ограничения происходит на одинаковую величину ДУрн. соответствующую изменению выходного сигнала регулятора 6 натяжения. Таким образом, новые уровни ограничения остаются симметричными относительно изменившегося вследствие отработки задания выходного напряжения регулятора 6 натяжения. Использование изобретения позволяет
повысить точность и увеличить быстродействие системы автоматического регулирования натяжений длинномерного материала на непрерывно-поточной линии за счет иск- лючения возможности насыщения регулятоpa натяжения при отработке возмущений по моменту нагрузки при корректировке натяжения в процессе работы.
Формула изобретения Устройство для регулирования натяжения длинномерного материала по авт.св. № 1416421, отличающееся тем, что, с целью повышения точности устройства путем обеспечения инвариантности к изменению нагрузки, в него дополнительно введены полосовой фильтр, задатчик уста новки нуля и два сумматора, причем выход
0
блока перераспределения диапазона регулирования в зависимости от технологических возмущений соединен с управляющим входом блока ограничения регулирующего воздействия через первый сумматор, второй вход которого соединен с выходом второго сумматора, подключенного первым входом к входу задания регулятора натяжения материала и к входу полосового фильтра, выход которого соединен с вторым входом второго сумматора, подключенного третьим входом к выходу задатчика установки нуля.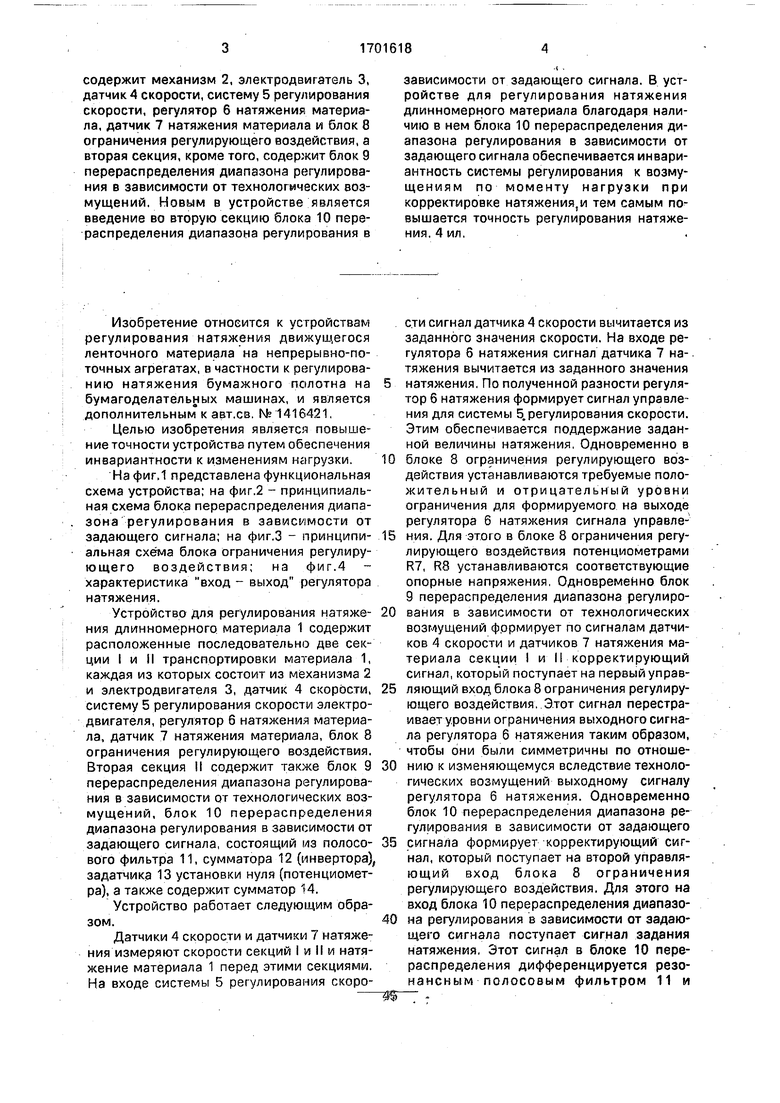
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения длинномерного материала | 1986 |
|
SU1416421A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2008 |
|
RU2386740C1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2010 |
|
RU2456740C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2203997C1 |
| Многодвигательный электропривод постоянного тока поточной линии | 1986 |
|
SU1415402A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ГИДРОАГРЕГАТА ГЭС | 2024 |
|
RU2830453C1 |
| Способ автоматического регулирования перетоков мощности | 1988 |
|
SU1697182A1 |
| Устройство управления подачей эмульсии на многоклетевом стане | 1982 |
|
SU1047564A1 |
| Система автоматического регулирования профиля и формы полосы | 1980 |
|
SU942842A1 |
Изобретение относится к регулированию натяжения бумажного полотна на бума- годелательных машинах и является дополнительным к устройству по авт.св. № 1416421. Цель изобретения - повышение точности устройства путем обеспечения инвариантности к изменениям нагрузки при корректировке натяжения. Для этого необходимо перестраивать уровни ограничения выходного сигнала регулятора натяжения в функции задающего натяжение сигнала. Устройство состоит из двух секций транспортировки материала 1, каждая из которых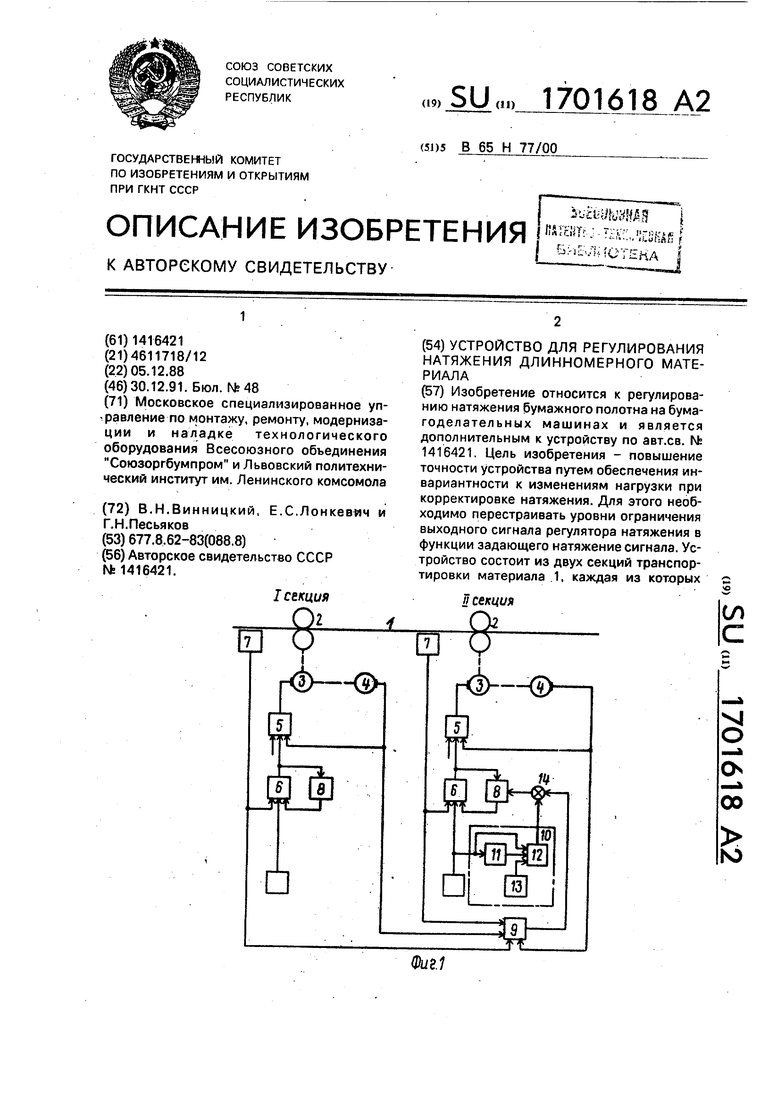
Фиг. Z
О О О
К региляторц 6 От оегилятараБ От Клока 10 - уОт5локо9
Фиг.З
Ј/ v&t
УигМ
-№;-№ „
| Устройство для регулирования натяжения длинномерного материала | 1986 |
|
SU1416421A1 |
