Изобретение относится к автоматическому регулированию натяжения полотна транспортируемого гибкого материала в многосекционных поточных линиях и может быть использовано на технологическом оборудовании бумажной и текстильной промышленности.
Цель изобретения - повышение точности регулирования путем оптимизации величины натяжения материала в каждой из секций поточной линии.
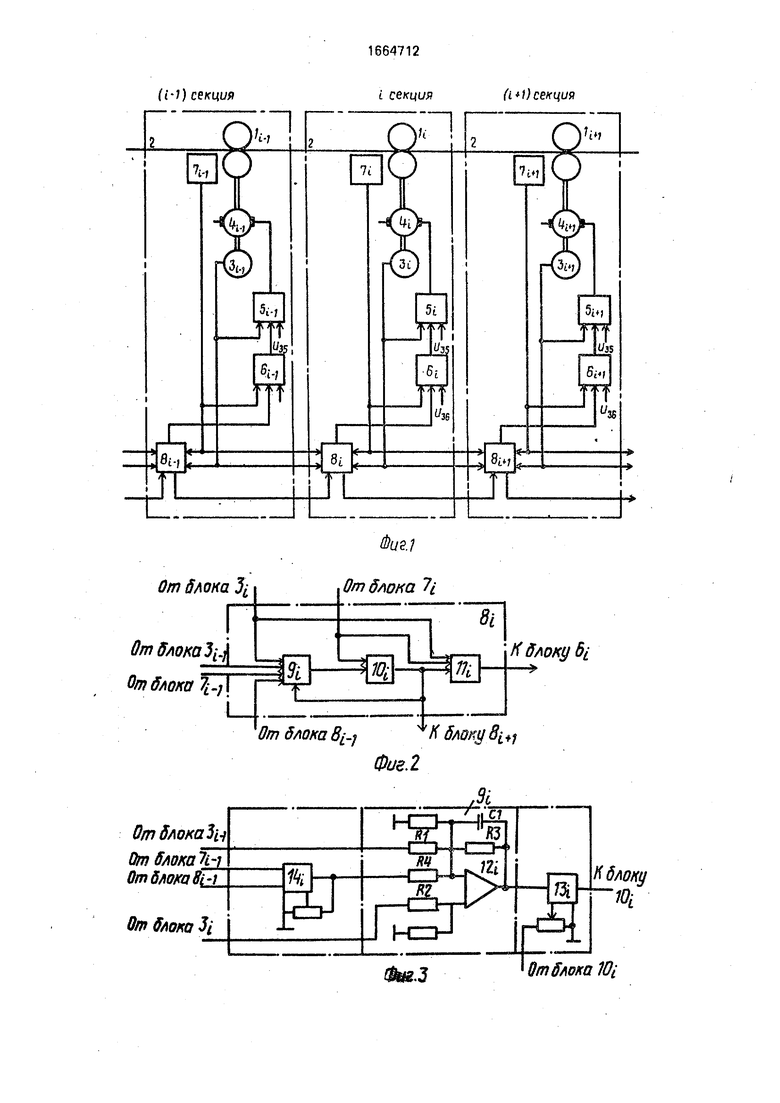
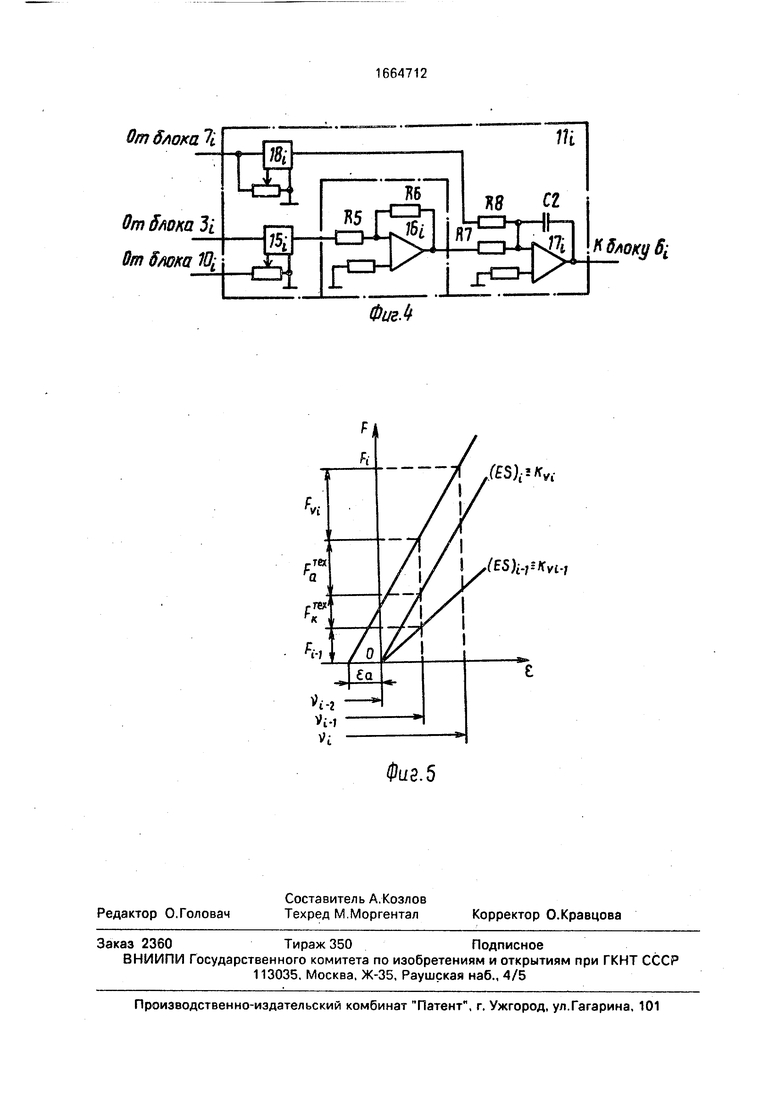
На фиг. 1 представлена функциональная схема предлагаемого устройства; на фиг. 2 - функциональная схема блока коррекции; на фиг. 3 - принципиальная схема
самонастраивающейся модели; на фиг. 4 - принципиальная схема функционального преобразователя; на фиг. 5 - закон регулирования.
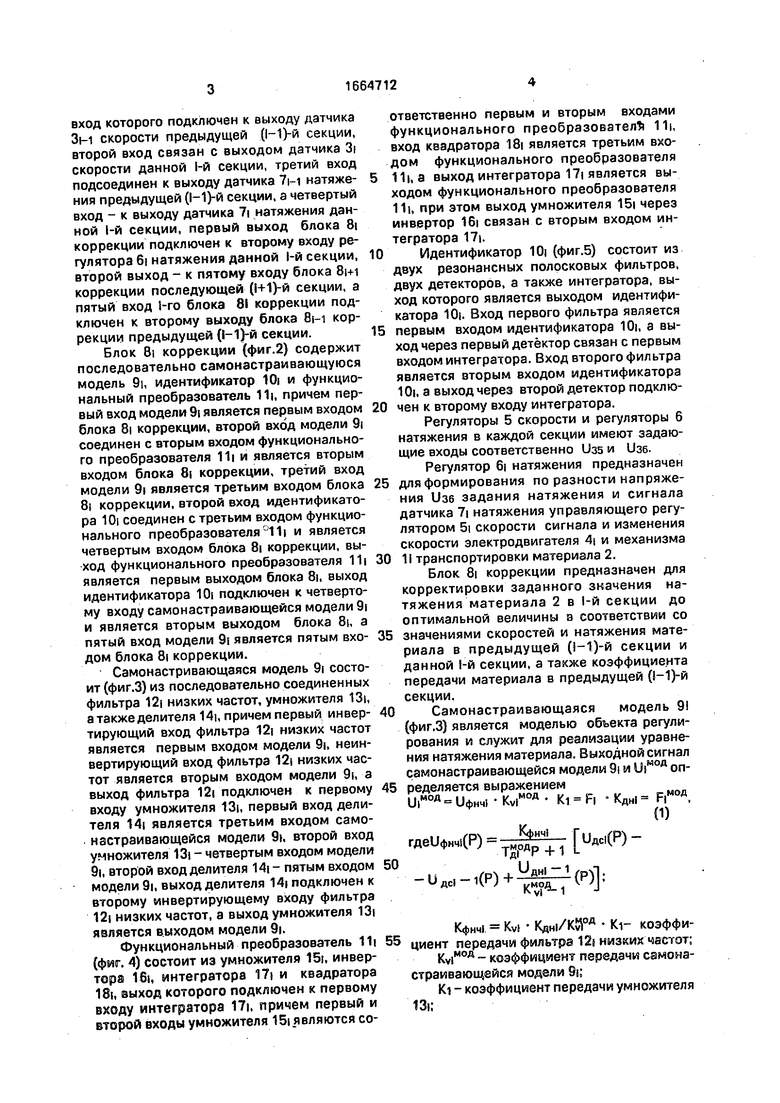
Устройство содержит (фиг. 1) в каждой 1-й из п секций механизм 1| транспортировки материала 2, кинематически связанный с датчиком 3| скорости и электродвигателем 4|, подключенным к выходу регулятора 5| скорости, первый и второй входы которого подсоединены к выходам соответственно регулятора 6i натяжения и датчика 3i скорости, датчик 7j натяжения, выход которого связан с первым входом регулятора 6i натяжения, блок 8i коррекции, первый
О ON
§ ю
вход которого подключен к выходу датчика Зм скорости предыдущей (1-1 )-й секции, второй вход связан с выходом датчика 3i скорости данной 1-й секции, третий вход подсоединен к выходу датчика 7м натяжения предыдущей (1-1)-й секции, а четвертый вход - к выходу датчика 7i натяжения данной 1-й секции, первый выход блока 8i коррекции подключен к второму входу регулятора 6| натяжения данной 1-й секции, второй выход - к пятому входу блока 8м коррекции последующей (1+1)-й секции, а пятый вход 1-го блока 81 коррекции подключен к второму выходу блока 8м коррекции предыдущей (1-1 )-й секции.
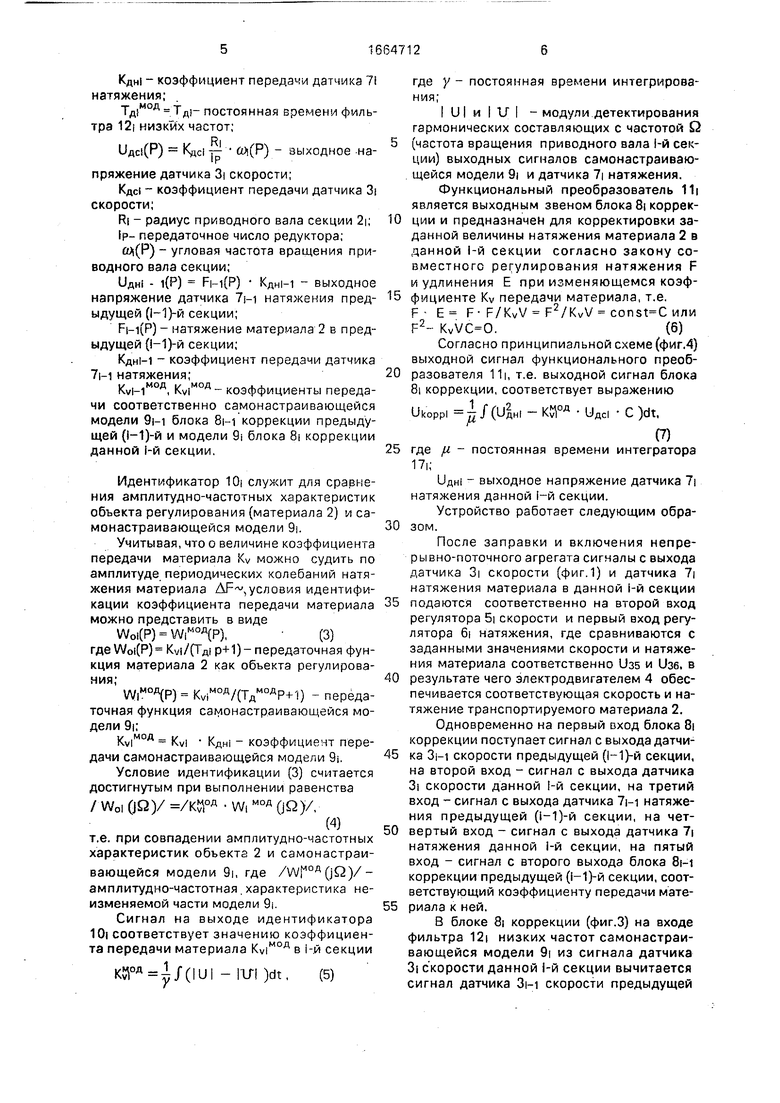
Блок 8i коррекции (фиг.2) содержит последовательно самонастраивающуюся модель 9|, идентификатор 10i и функциональный преобразователь 11|, причем первый вход модели 9i является первым входом блока 8| коррекции, второй вход модели 9i соединен с вторым входом функционального преобразователя 11i и является вторым входом блока Bi коррекции, третий вход модели 9i является третьим входом блока 8t коррекции, второй вход идентификатора 10i соединен с третьим входом функционального преобразователя 11| и является четвертым входом блока 8i коррекции, выход функционального преобразователя 111 является первым выходом блока 8i. выход идентификатора 10i подключен к четвертому входу самонастраивающейся модели 9i и является вторым выходом блока 8i, a пятый вход модели 9| является пятым входом блока 8i коррекции.
Самонастривающаяся модель 9i состоит (фиг.З) из последовательно соединенных фильтра 12| низких частот, умножителя 13i, а также делителя 14), причем первый инвертирующий вход фильтра 12) низких частот является первым входом модели 9i, неинвертирующий вход фильтра 12{ низких частот является вторым входом модели 9i, a выход фильтра 12) подключен к первому входу умножителя 13i, первый вход делителя 14) является третьим входом самонастраивающейся модели 9i, второй вход умножителя 13) - четвертым входом модели 9i, второй вход делителя 14i- пятым входом модели 9i, выход делителя 14) подключен к второму инвертирующему входу фильтра 12) низких частот, а выход умножителя 13i является выходом модели 9i.
Функциональный преобразователь 11| (фмг. 4) состоит из умножителя 15t, инвертора 16i, интегратора 17| и квадратора 18t, выход которого подключен к первому входу интегратора 17ь причем первый и второй входы умножителя 15i являются соответственно первым и вторым входами функционального преобразователи 11|, вход квадратора 18| является третьим входом функционального преобразователя
11|, а выход интегратора 17| является выходом функционального преобразователя 11i, при этом выход умножителя 15i через инвертор 16i связан с вторым входом интегратора 17|.
Идентификатор 10i (фиг.5) состоит из двух резонансных полосковых фильтров, двух детекторов, а также интегратора, выход которого является выходом идентификатора 10|. Вход первого фильтра является
первым входом идентификатора 10i, а выход через первый детектор связан с первым входом интегратора. Вход второго фильтра является вторым входом идентификатора 10i, а выход через второй детектор подключен к второму входу интегратора.
Регуляторы 5 скорости и регуляторы 6 натяжения в каждой секции имеют задающие входы соответственно Узз и Use. Регулятор 6| натяжения предназначен
для формирования по разности напряжения Узе задания натяжения и сигнала датчика 7i натяжения управляющего регулятором 5i скорости сигнала и изменения скорости электродвигателя 4| и механизма
11 транспортировки материала 2.
Блок 8) коррекции предназначен для корректировки заданного значения натяжения материала 2 в 1-й секции до оптимальной величины в соответствии со
значениями скоростей и натяжения материала в предыдущей (-1)-й секции и данной 1-й секции, а также коэффициента передачи материала в предыдущей (1-1)-й секции.
Самонастраивающаяся модель 91 (фиг.З) является моделью объекта регулирования и служит для реализации уравнения натяжения материала. Выходной сигнал самонастраивающейся модели 9i и UiMOA определяется выражением
иГд ифнч KviMOfl Ki F, КДН| Р|мод,
0) гдеифнч1(Р),(Р)-и-- +Ът(р)1:
Кфнч Kv Кдн1/КЙОД К1- КОЭффициент передачи фильтра 12i низких частот; KviMOA - коэффициент передачи самонастраивающейся модели 9д;
KI - коэффициент передачи умножителя 13.;
Кдн - коэффициент передачи датчика 7i натяжения;
постоянная времени фильтра 12; низких частот;
Uflci(P) Кдс| -т- Wi(P) выходное -напряжение датчика 3| скорости;
КдС| - коэффициент передачи датчика 3i скорости;
RI - радиус приводного вала секции 2и
Ip- передаточное число редуктора;
(Р) - угловая частота вращения приводного вала секции;
11дн - i{P) Fi-i(P) Кдны - выходное напряжение датчика 7ы натяжения предыдущей (1-1)-й секции;
Ры(Р) - натяжение материала 2 в предыдущей (Ы)-й секции;
КднЫ - коэффициент передачи датчика 7|-1 натяжения;
КУ|-1МОД, Ку|мод- коэффициенты передачи соответственно самонастраивающейся модели QI-I блока 8ы коррекции предыдущей (1-1)-й и модели 9i блока 8i коррекции данной 1-й секции.
Идентификатор 10i служит для сравнения амплитудно-частотных характеристик объекта регулирования(материала 2) и самонастраивающейся модели 9|.
Учитывая, что о величине коэффициента передачи материала Kv можно судить по амплитуде периодических колебаний натяжения материала ДР,уеловия идентификации коэффициента передачи материала можно представить в виде
Woi(P) Л/|МОД(Р), (3)
где W0i(P) Ку|/(ТД| р+1)- передаточная функция материала 2 как объекта регулирования;
(Р) KviMOfl/(TAMOAP+1) - передаточная функция самонастраивающейся модели 9i;
KV|MOA Kvi КдН| - коэффициент передачи самонастраивающейся модели 9j.
Условие идентификации (3) считается достигнутым при выполнении равенства
/ Wol (|Q)/ /Кйод Wi мод (jQ)/,
(4)
т.е. при совпадении амплитудно-частотных характеристик объекта 2 и самонастраивающейся модели 9i, где ЛЛ/Г1014 (jQ)/- амплитудно-частотная. характеристика неизменяемой части модели 9|.
Сигнал на выходе идентификатора 10i соответствует значению коэффициента передачи материала КУ|МОД в i-.й секции
(|и| -rUl)dt, (5)
где у - постоянная времени интегрирования;
I UI и I IT I - модули детектирования гармонических составляющих с частотой Q
5 (частота вращения приводного вала 1-й секции) выходных сигналов самонастраивающейся модели 9i и датчика 7| натяжения.
Функциональный преобразователь 11| является выходным звеном блока 8| коррек0 ции и предназначен для корректировки заданной величины натяжения материала 2 в данной 1-й секции согласно закону совместного регулирования натяжения F и удлинения Е при изменяющемся коэф5 фициенте Kv передачи материала, т.е. F- E F- F/KVV F2/KVV const C или
R .
(6)
Согласно принципиальной схеме (фиг.4) выходной сигнал функционального преоб- 0 разователя 11|, т.е. выходной сигнал блока 8i коррекции, соответствует выражению
Ukoppi 7Z/(UAHi - КЯОД иДС| С )dt,
(7)
5 где /J, - постоянная времени интегратора 17i;
иДН| - выходное напряжение датчика 7| натяжения данной 1-й секции.
Устройство работает следующим обра0 зом.
После заправки и включения непрерывно-поточного агрегата сигналы с выхода датчика 3i скорости (фиг.1) и датчика 7| натяжения материала в данной 1-й секции
5 подаются соответственно на второй вход регулятора 5| скорости и первый вход регулятора 6i натяжения, где сравниваются с заданными значениями скорости и натяжения материала соответственно Das и Узе, в
0 результате чего электродвигателем 4 обеспечивается соответствующая скорость и натяжение транспортируемого материала 2.
Одновременно на первый вход блока 8| коррекции поступает сигнал с выхода датчи5 ка Зы скорости предыдущей (Ы)-й секции, на второй вход - сигнал с выхода датчика 3i скорости данной 1-й секции, на третий вход - сигнал с выхода датчика 7ы натяжения предыдущей (1-1)-й секции, на чет0 вертый вход - сигнал с выхода датчика 7 натяжения данной 1-й секции, на пятый вход - сигнал с второго выхода блока 8м коррекции предыдущей (Ы)-й секции, соответствующий коэффициенту передачи мате5 риала к ней.
В блоке 8i коррекции (фиг.З) на входе фильтра 12i низких частот самонастраивающейся модели 9i из сигнала датчика 3i скорости данной i-й секции вычитается сигнал датчика Зы скорости предыдущей
(|-1)-й секции. В делителе 14i самонастраивающейся модели 9i осуществляется деление сигнала датчика Ti-i натяжения предыдущей (1-1)-й секции на сигнал коэффициента передачи материала 2 в предыдущей (1-1}-й секции и часто суммируется с указанной разностью на входе фильтра 12| низких частот. Полученный сигнал усиливается и сдвигается по фазе в фильтре 12i низких частот и умножается умножителем 13i на сигнал коэффициента передачи материала 2 в данной 1-й секции, который определяется идентификатором 10i. В результате на выходе умножителя 13i самонастраивающейся модели 9i формируется сигнал модели. По полученному сигналу модели 9| и по сигналу с выхода датчика 7i натяжения данной 1-й секции в идентификаторе 10i формируется сигнал, соответствующий значению коэффициента передачи материала 2 в данной 1-й секции, который подается на управляющий вход самонастраивающейся модели 9| (второй вход умножителя 130, и таким образом осуществляется подстройка модели 9| под объект регулирования. Кроме того, сигнал,соответствующий коэффициенту передачи материала 2 в данной 1-й секции, с выхода идентификатора 10| подается на пятый вход блока 8|+1 коррекции последующей (1+1)-й секции и на первый вход умножителя 15i функционального преобразователя 11| данного блока 8| коррекции (фиг.4), а на второй вход умножителя 15| подается сигнал с датчика 3i скорости данной 1-й секции.
Результат перемножения усиливается и инвертируется в инверторе 16i и подается на первый вход интегратора 17|. На вход квадратора 18i (третий вход функционального преобразователя 11i) поступает сигнал с датчика 7i натяжения данной i-й секции, возводится в квадрат, подается на второй вход интегратора 17|, где вычитается из него полученное ранее инвертированное произведение сигналов коэффициента передачи материала 2 и датчика 3i скорости данной 1-й секции. Разностный сигнал интегрируется в интеграторе 17i подается на второй вход регулятора 6i натяжения данной 1-й секции, как корректирующий, перестраивая величину натяжения материала 2 в данной 1-й секции до оптимального значения.
Если параметры технологического процесса в предыдущей (Ы)-й секции стабильны, а значит, коэффициент передачи материала 2, выходящего из предыдущей (М)-й секции, не изменяется, то корректирующий сигнал на первом выходе блока 8i коррекции данной 1-й секции.равен нулю.
Ранее установленное оптимальное значение натяжения материала 2 в данной 1-й секции поддерживается регулятором 6i натяжения.
При изменении коэффициента передачи материала 2, например, при его уменьшении натяжение материала 2 в данной 1-й секции ослабляется и сигнал на выходе датчика 7| натяжения уменьшается. Регулятор
0 6i натяжения по разности заданного сигнала и уменьшенного сигнала датчика 1 натяжения вырабатывает на своем выходе управляющий сигнал, который воздействует на регулятор 5i скорости, и его выходной
5 сигнал возрастает, увеличивается скорость электродвигателя А и механизма 1, в результате чего натяжение материала 2 восстанавливается на прежнем уровне. Кроме того, уменьшение коэффициента
0 передачи материала 2 вызывает уменьшение амплитуды гармонической составляющей натяжения в данной i-й секции, обусловленной периодическими колебаниями скорости. Уменьшение гармониче5 ской составляющей сигнала датчика 7| натяжения данной i-й секции приводит к уменьшению положительно, выходного сигнала идентификатора 10i (фиг.2), соответствующего значению коэффициента пе0 редачи материала 2 в данной i - и секции. Уменьшенный выходной сигнал индентифи- катора 10i поступает на управляющий вход самонастраивающейся модели 9i (второй вход умножителя 13|) и уменьшает ее коэф5 фициент передачи, а также поступает на пятый вход (1+1)-го блока 8|+1 коррекции. Процесс определения нового уменьшенного значения коэффициента передачи материала 2 идентификатором 10i и само0 настройка модели 9i осуществляются до момента сравнения амплитуд гармонических составляющих сигналов датчика 7| натяжения и модели 9|. В то же время уменьшенный сигнал коэффициен5 та передачи материала 2 поступает на первый вход умножителя 15i функционального преобразователя 111 (фиг.4), где умножается на сигнал датчика 3i скорости данной 1-й секции. Уменьшенное их про0 изведение усиливается на постоянную величину с и инвертируется инвертором 16|, уменьшенный по абсолютной величине отрицательный выходной сигнал которого алгебраически суммируется на
5 входе инвертора 17| с положительным сигналом квадратора 18i, возводящего в квадрат сигнал датчика 7t натяжения. На входе интегратора 17| появляется положительный сигнал, а на выходе - отрицательный сигнал, являющийся выходным
сигналом функционального преобразователя 11| блока 8i коррекции. Данный отрицательный корректирующий сигнал с выхода блока 8| коррекции подается на второй вход регулятора 6i натяжения (фиг. 1) и уменьшает величину задания натяжения материала 2 в данной 1-й секции. Выходной сигнал регулятора 6i натяжения уменьшается, что приводит к уменьшению выходного сигнала регулятора 5i скорости, уменьшению скорости электродвигателя 4| и механизма 1| и, тем самым, к уменьшению натяжения материала 2 в данной 1-й секции. Натяжение уменьшается до оптимальной величины р V , wi С
соответствующей новому уменьшенному значению коэффициента передачи материала.
Уменьшение натяжения происходит до момента появления нулевого сигнала на входе интегратора 17i функционального преобразователя 11|, что соответствует выполнению равенства Fi2 Kvi Vi -С, т.е. закону регулирования F Е const С. Формула изобретения
1.Устройство для регулирования натяжения материала в многосекционной непрерывно-поточной линии, содержащей п секций, каждая из которых имеет механизм транспортировки материала, кинематически связанный с датчиком скорости и электродвигателем, подключенным к выходу регулятора скорости, первый и второй входы которого подсоединены к выходам соответственно регулятора натяжения и датчика скорости, а также датчик натяжения, выход которого связан с первым входом регулятора натяжения, отличающееся тем, что, с целью повышения качества регулирования путем обеспечения оптимальной величины натяжения материала, оно снабжено для каждой i-й секции блоком коррекции, первый вход которого подключен к выходу датчика скорости предыдущей (|-1)-й секции, второй вход связан с выходом датчика скорости данной 1-й секции, третий вход подсоединен к выходу датчика натяжения предыдущей (1-1)-й секции, четвертый вход - к выходу датчика натяжения данной 1-й секции, первый выход блока коррекции подключен к второму входу регулятора натяжения i-й секции, второй выход - к пятому входу блока коррекции последующей (И-1)-й секции, а пятый вход i-ro блока коррекции подключен к второму входу блока коррекции предыдущей (1-1)-й секции.
2.Устройство по п.1, о т л и ч а ю щ е е- с я тем, что блок коррекции содержит самонастраивающуюся модель, идентификатор и функциональный преобразователь, причем первый вход самонастраивающейся модели является первым входом блока кор- 5 рекции, а выход подключен к первому входу идентификатора, выход которого связан с первым входом функционального преобразователя, вторые входы функционального преобразователя и самонастраивающейся
0 модели объединены и являются вторым входом блока коррекции, третий вход самонастраивающейся модели является третьим входом блока коррекции, второй вход идентификатора и третий вход функционально5 го преобразователя объединены и являются четвертым входом блока коррекции, выход функционального преобразователя является первым выходом блока коррекции, выход идентификатора объединен счетвер0 тым входом самонастраивающейся модели и является вторым выходом блока коррекции, при этом пятый вход самонастраивающейся модели является пятым входом блока коррекции
53. Устройство по пп.1 и2,отличающ е е с я тем, что самонастраивающаяся модель содержит делитель, фильтр низких частот и умножитель, причем первый инвертирующий вход фильтра низких частотявля0 ется первым входом самонастраивающейся модели, второй инвертирующий вход связан с выходом делителя, а третий неинвертирующий вход является вторым входом самонастраивающейся модели, первый
5 вход делителя является третьим входом самонастраивающейся модели, при этом выход фильтра низких частот связан с первым входом умножителя, второй вход которого является четвертым входом самонастраи0 вающейся модели, а выход умножителя является выходом самонастраивающейся модели, причем второй вход делителя является пятым входом самонастраивающейся модели.
54. Устройство по пп. 1 и2,отличающ е е с я тем, что функциональный преобразователь содержит квадратор, интегратор, умножитель и инвертор, причем выход квадратора связан с первым входом интег0 ратора, выход которого является выходом функционального преобразователя, умножитель и инвертор включены последовательно и подсоединены к второму входу интегратора, при этом первый и второй
5 входы умножителя и вход квадратора являются соответственно первым, вторым и третьим входами функционального преобразователя.
fiwvgy
Ј owvg a/Q
tt#t toi/gu/o ЈЈ mavg UIQ
nЈBXOVQWQ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МОДУЛЯ УПРУГОСТИ ДВИЖУЩЕГОСЯ МАТЕРИАЛА | 1991 |
|
RU2016375C1 |
| Устройство для измерения деформации материала | 1990 |
|
SU1772602A1 |
| Система автоматического регулирования расходов на каналах с большими уклонами дна | 1990 |
|
SU1802358A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1996 |
|
RU2109317C1 |
| Устройство для управления многокомпонентным дозированием | 1988 |
|
SU1691823A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ НЕЙТРАЛЬНОГО ТИПА | 2000 |
|
RU2182348C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2230351C2 |
| СИГНАЛЬНО-АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ С ЗАПАЗДЫВАНИЕМ НЕЙТРАЛЬНОГО ТИПА | 2009 |
|
RU2411565C2 |
| Устройство для измерения модуля упругости материала | 1989 |
|
SU1677497A1 |
| Устройство для обнаружения ошибок при передаче кодов | 1989 |
|
SU1615723A2 |
Изобретение относится к автоматическим регуляторам натяжения полотна, транспортируемого в многосекционных поточных линиях гибкого материала и может быть использовано на технологическом оборудовании в бумажной и текстильной отраслях промышленности. Целью изобретения является повышение точности регулирования путем оптимизации величины натяжения материала в каждой из секций поточной линии. Устройство содержит в каждой секции линии приводной двигатель, подключенный к выходу регулятора скорости, связанный с выходом регулятора натяжения, к соответствующим входам которых подключены датчики скорости и натяжения материала, а также первый выход блока коррекции, состоящего из самонастраивающейся модели, идентификатора и функционального преобразователя и позволяющего по сигналам датчиков натяжения и скорости данной и предыдущей секций и коэффициенту передачи материала предыдущей секции корректировать натяжение материала в данной секции до достижения оптимального значения. 3 з.п.ф-лы, 5 ил.
4
Knhnao(iti)
1 ЭПф
tfnhJos (
От блоха 7
От SAOKU 3i
От блока Щ
К блоку б
ФигЛ
#S)
(ES).j
| Шестаков В.М | |||
| Регулируемые электроприводы отделочных агрегатов целлюлозно-бумажной промышленности | |||
| - М.: Лесная промышленность, 1982, с, 14-15. |
