&
СЛ
11
ай
Од
4;
00
со
Изобретение относится к подъемно- транспортному машиностроению, а именно к выносным опорам.
Цель изобретения - повышение надежности работы.
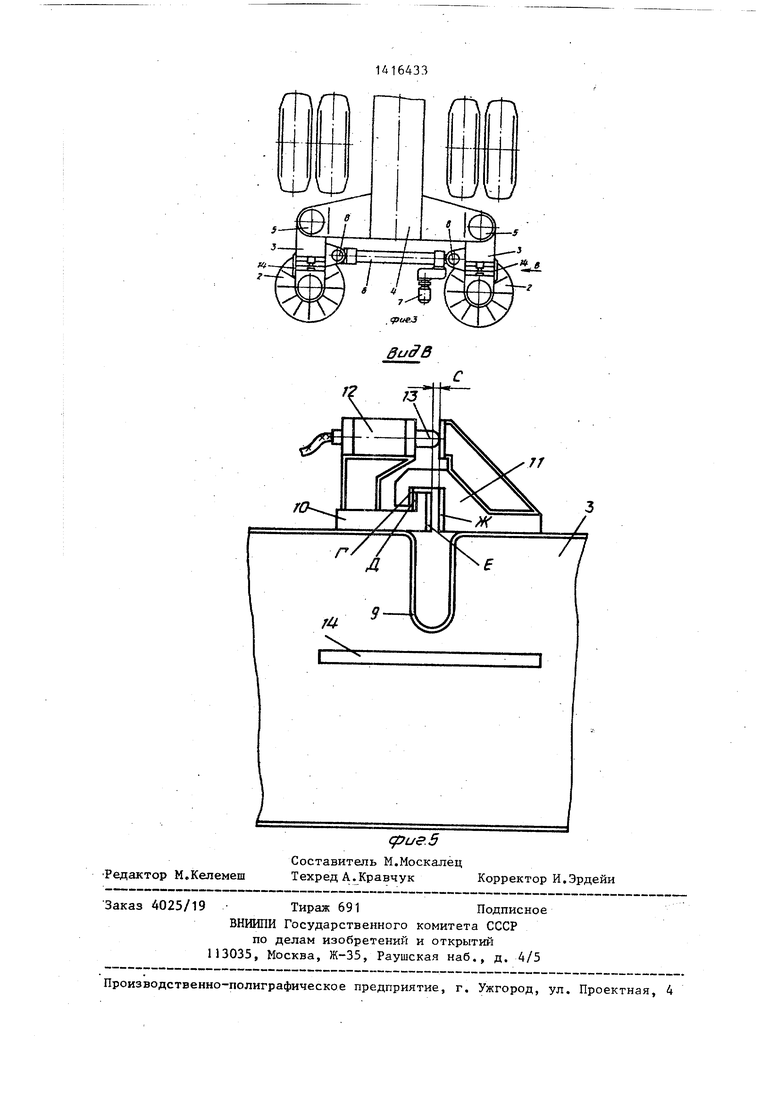
На фиг. 1 изображена выносная опора, рабочее положение на фиг. 2 - вид А на фиг. Г, на фиг, 3 - выносная опора, транспортное положение, вид сверху, на фиг. 4 - вид Б на фиг. 2, на фиг. 5 - вид В на фиг. 3.
Выносная опора содержит домкраты
1(фиг.1) с опорными плитами 2, жестко установленные в поворотных балках 3, закрепленных на раме 4 транспортного средства посредством вертикальных осей 5, раздвижной силовой элемент 6 (в виде винтовой стяжки с самотормозящейся резьбой) с приводом
7 в виде электродвигателя с редуктором, скрепленный осями 8 с двумя поворотными балками 3, на верхних поверхностях которых вьтолнен паз 9 (фиг.4).
Противоположные стороны паза снабжены упорами 10 и 11 (фиг.4). На упоре 10 установлен электрический датчик 12, а упор 11 взаимодейству ет с исполнительным элементом 13 датчика 12.
В транспортном положении опорных плит 2 поверхности Г и Д упоров 10 и 11 взаимодействуют друг с другом, повышая жесткость балок 3, снабженных пазом 9, и исключая их изгиб от весовых нагрузок и дополнительных нагрузок, возникаюш 1х, например, вследствие примерзания опорных плит
2к грунту. Между поверхностями Е
и Ж упоров 10 и 11 имеется расчетный зазор С, позволяюш;ий при изгибе бало
3в пределах упругой деформации от нагрузок при вывешивании транспортного средства относительно перемещение .упоров 10 и 11 (фиг.5), Для увеличения жесткости балки в горизонтальной плоскости в районе паза на балке 3 установлены ребра 14.
Выносная опора работает следующим образом.
При включении привода 7 силовой . элемент 6, раздвигаясь, поворачивает балки 3 вокруг вертикальных осей 5. При этом сам раздвижной силовой элемент с приводом совершает плоскопараллельное движение относительно рамы 4 транспортного средства. Поворот балок 3 осуществляется на угол 90
0
5
0
5
0
5
0
5
0
5
от первоначального положения. При этом опорные плиты 2 выносятся за колею колес транспортного средства (фиг.2). Так как раздвижной силовой элемент 6 выполнен в виде винтовой стяжки с самотормозящейся резьбой, то возможна остановка балок 3 в любом промежуточном положении.
После перевода поворотньк балок 3 в рабочее положение в действие приводятся домкраты 1, которые устанавливают опорные плиты 2 на грунт (фиг,1). Производится вьшешивание транспортного средства. При воздействии опорных плит на грунт появляется вертикальное усилие на каждом домкрате, которое изгибает поворот- |ную балку в вертикальной плоскости. Изгиб балки вызьшает упругую деформацию паза 9, и упоры 10 и 11 перемещаются один относительно другого (фиг.4), При этом упор 11 взаимодействует с исполнительным элементом 13 электрического датчика 12, кото- рьй дает сигнал, свидетельствующий о контакте опорной плиты 2 с грунтом. Относительное перемещение частей балки 3 происходит до тех пор, пока поверхности Е и Ж упоров 10 и 11 не начнут взаимодействовать одна с другой, т.е. зазор С станет равным нулю. При этом жесткость поворотной балки увеличивается.
После получения электрических сигналов от датчиков 12 всех домкратов электроавтоматика вьщает команду на дальнейшее вьшешивание и горизон- тирование транспортного средства.
Перевод выносной опоры из рабочего положения в транспортное производится следующим образом.
I
Домкраты 1, складьшаясь, отрьюают от грунта опорные плиты 2 и поднимают их в транспортное положение. Упор 11 за счет упругих сил, зависящих от конструкции и материала балки 3, перемещается в исходное положение и своей поверхностью Г входит в контакт с поверхностью Д упора 10, при этом между поверхностями Е и Ж образуется зазор С (фиг.5). Исполнитель- ньй элемент 13 электрического датчика 12 возвращается в исходное положение. После этого включается привод 7 силового элемента 6, которьй, складьшаясь, поворачивает балки 3 вокруг вертикальных осей 5. При этом
балки 3 с опорными плитами 2 устанавливаются в транспортное положение..
Формул.а изобретения
Выносная опора подъемно-транспорт- ноГо средства, содержащая домкраты с опорными плитами, установленными на балках, соединенных с рамой транспортного средства, и электрический датчик с исполнительным элементом, подключенным к системе управления
1416433
транспортным средством, отличающаяся тем, что, с целью повышения надежности работы, она снабжена упорами, а на верхней поверхности каждой балки выполнен паз, по обеим сторонам которого установлены упоры, при этом на каждой балке на одном из упоров установлен электрический датчик с исполнительным элементом, взаимодействующим с другим упором в рабочем положении опорной плиты.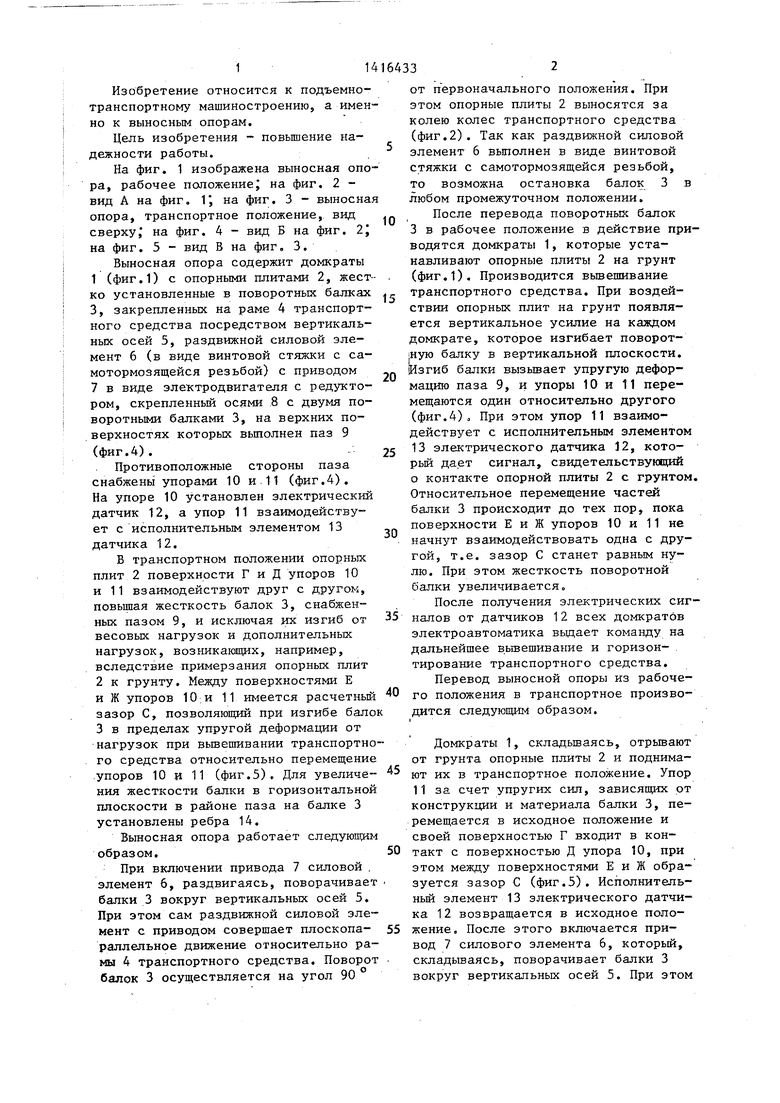

| название | год | авторы | номер документа |
|---|---|---|---|
| Выносная опора грузоподъемной машины | 1986 |
|
SU1331813A1 |
| Опора подъемно-транспортного средства | 1987 |
|
SU1418283A1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Выносная опора | 2019 |
|
RU2726507C1 |
| Выносная опора грузоподъемной машины | 2022 |
|
RU2787541C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| ХОДОВАЯ ЧАСТЬ ГУСЕНИЧНОГО КРАНА С ПЕРЕМЕННОЙ КОЛЕЕЙ | 2004 |
|
RU2266841C1 |
| Выносная опора подъемно-транспортного средства | 1985 |
|
SU1265131A2 |
| ВЫНОСНАЯ ОПОРА ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2361806C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2012 |
|
RU2482578C1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к выносным опорам. Цепь изобретения - повышение надежности работы. Использование изобретения позво- . ляет получить сигнал о контакте опорной плиты с грунтом благодаря нали- ; чию паза 9, посредством которого упругая деформация поворотной балки 3 передается непосредственно испол- нительному элементу 13 электрического датчика 12. Паз 9 выполнен на верхней поверхности поворотной балки 3 и снабжен упорами 10 и 11, которые взаимодействуют друг с другом в рабочем положении опорных плит. 5 ил.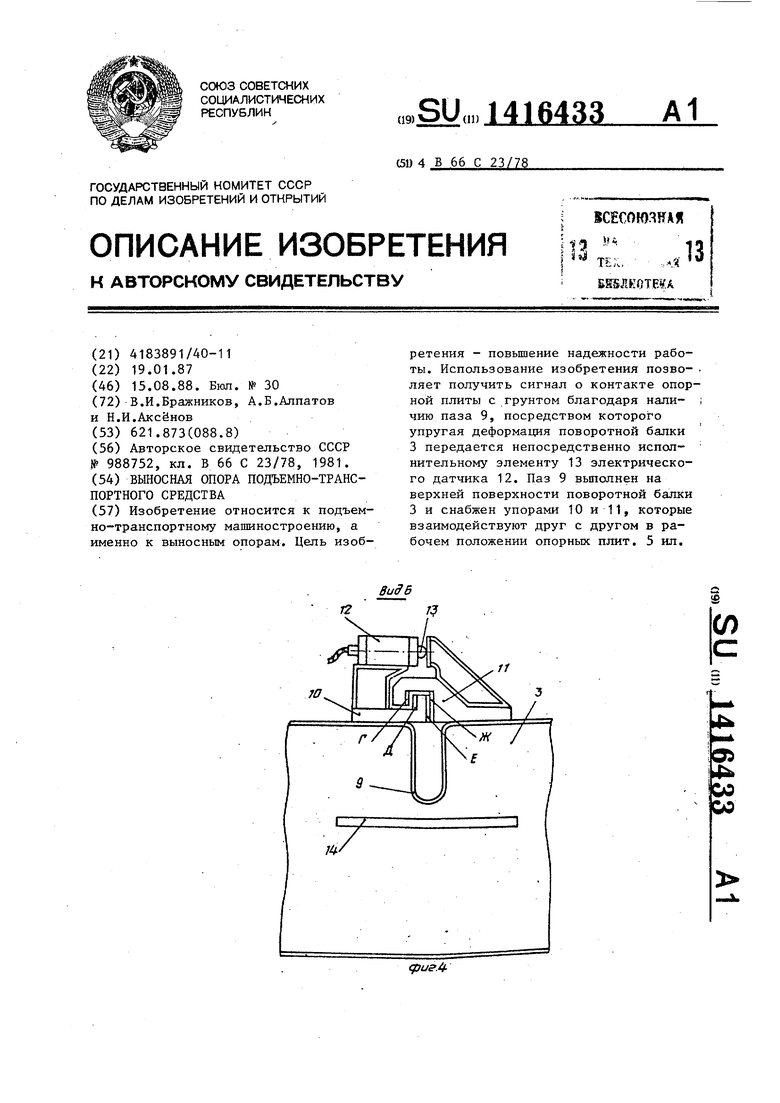
4/
77/77/
/// ///////7////////////у////7// //////////////////////.
(ри&. 1
4/
77/77/
rh
Чr-Tj
г
Д
/
N7
| Выносная опора | 1981 |
|
SU988752A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
