Изобретение относится к механизации работ по ремонту железнодорожного пути и предназначено дла автоматизации управления механизмом подъема путевой машины, а также для контроля состояния отремонтированного пути по уровню с целью определения по условиям безопасности максимально допустимой скорости движения первых поездов, пропускаемых по отремонтированному участку.
Известна путевая машина, содержащая закрепленные на шасси путеподъемник, смонтированную с возможностью установки в транспортное положение тележку с рабочими органами, базовую ось, на которой смонтирован автоуровень, включающий маятник, сельсиндатчик, механически соединенный с маятником и электрически - с сельсинприемником, установленным на пульте управления, успокоитель автоколебаний маятника- и механизм управления путеподъемником tl.
Недостатком известной путевой машины является то, что машинное масло, применяемое как успокоитель маятника, себя не оправдывает и базовая ось, закрепленная на электромагнитах путеподъемника, не служит показателем положения рельсовых нитей по уровню, а также отсутствие контрольного уровня.
Цель изобретения - повышение качества выправки пути.
Поставленная цель достигается тем, что путевая машина, содержащая закрепленные на шасси путеподъемник, смонтированную с возможностью установки в транспортное положение тележку с рабочими органами, базовую ось,- на которой смонтирован автоуровень, включающий в себя маятник, сельсин-датчик, механически соединенный с маятником и электрически с сельсин-приемником, установленным на пульте управления, успокоитель автоколебаний маятника, и механизм управления путеподъемником, снабжена шарнирно установленной поперек тележки за путеподъемником рамой, несущей базовую ось, рамкой, смонтированной на последней, и успокоителем колебаний рамки, содержащим смонтированные на рамке гибкие пластины, расположенные вдоль пути,установленные на стойках рамы импульсные электромагниты для взаимодействия с пластинами, при этом успокоитель колебаний маятника включает в себя две гибкие пластины, расположенные поперек пути, и за. крепленные на стержне маятника, который смонтирован на базовой оси, и закрепленный на рамке электромагнит для взаимодействия с указанными гибкими пластинами, причем сельсиндатчик, установлен на рамке и соединен с сельсин-приемником по индикаторной схеме, а механизм управления путеподъемником включает в себя соединенную с сельсин-приемником гибкой связью каретку с электроконтактами .и дополнительную каретку с электроконтактом для взаимодействия с электроконтактами указанной каретки.
Кроме того пvтeвaя машина снабжеO на смонтировайной на шасси за указанной тележкой дополнительной тележкой и установленным на ней контрольным автоуровнем, установленным на пульте управления, и регистрирующим
5 устройством, соединеннымс сельсиндатчиком контрольного автоуровня, причем регистрирующее устройство включает в себя сельсин-приемник, соединенную с ним гибкой связью и
0 смонтированную с возможностью продольного перемещения каретку с консольно закрепленным на ней электроконтактом, шкалу с электроконтактами и импульсный электросчетчик, сое5 диненный с последними.
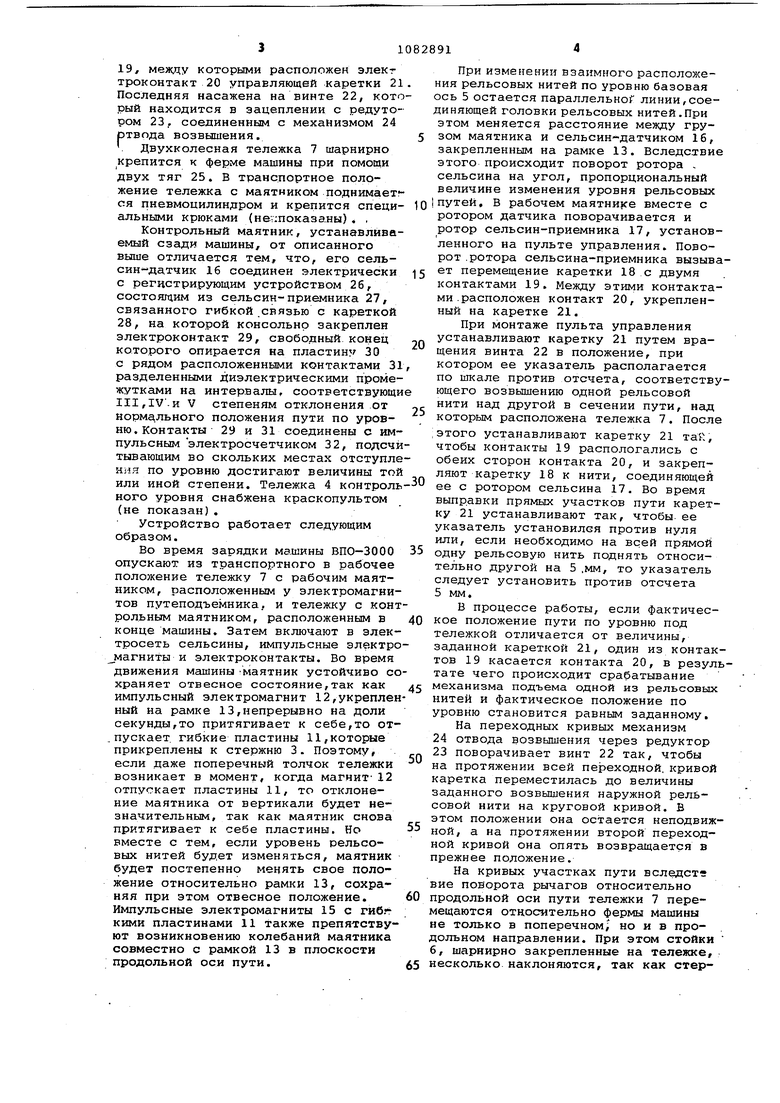
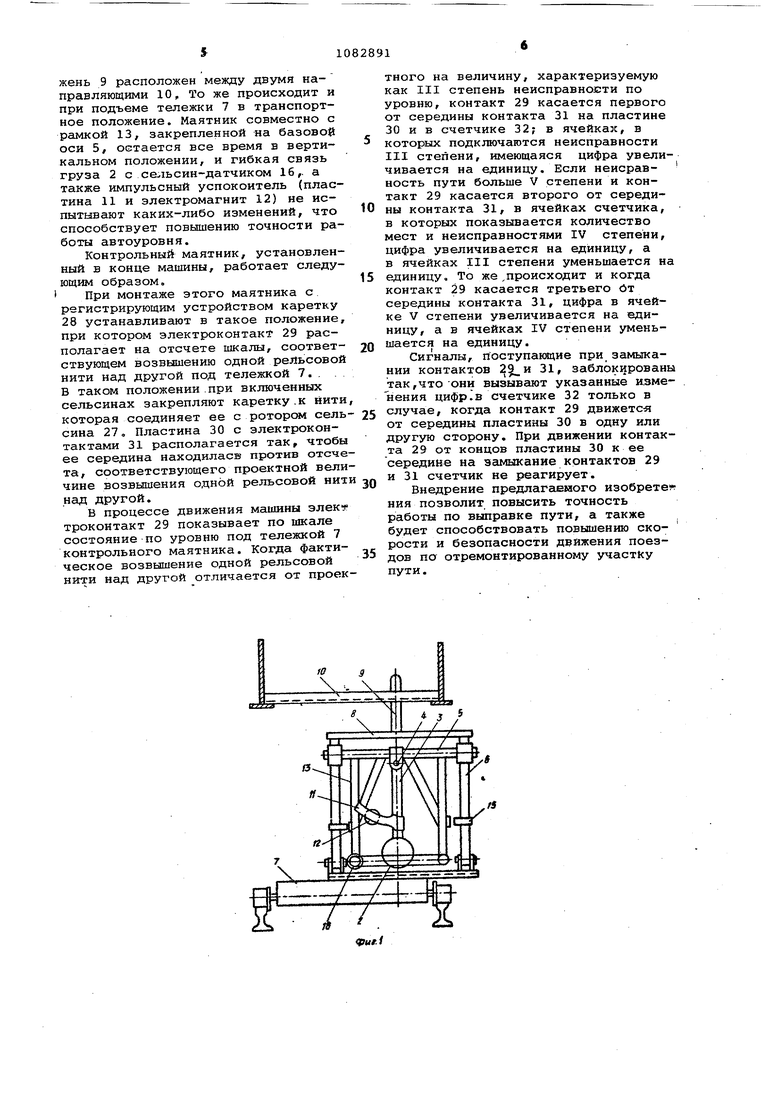
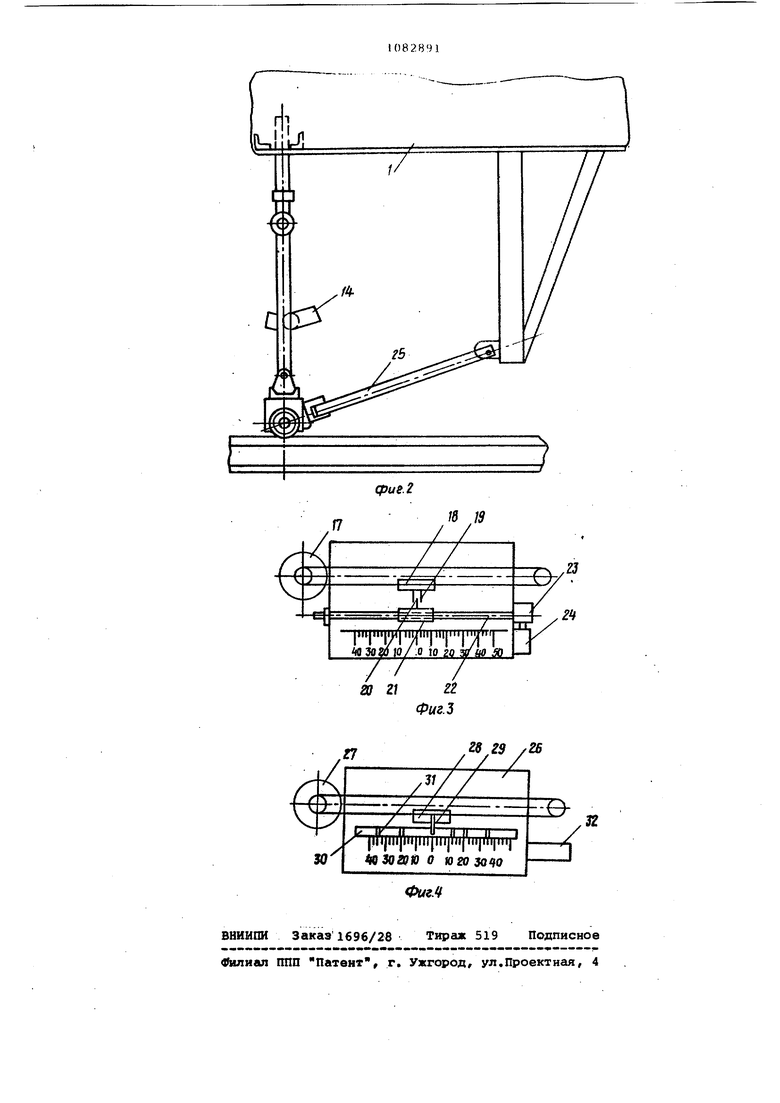
На фиг, 1 изображен автоуровень путевой машины, общий вид; на фиг.2ТО же, вид сбоку; на фиг. 3 -пульт,управления автоуровня; на фиг. 4 регистрирующее устройство.
Путевая машина 1 содержит путеподъемник, автоуровень, который состоит из физического маятника, включающего груз 2, который висит на стержне 3. Ось 4 вращения маятника, расположенная вдоль оси пути.
подвешена к базовой оси 5 и покоится на стойках б, шарнирно опирающихся на двухколесную тележку 7, расположенную на рельсовом пути сзади элек0 тромагнитного путеподъемника. На
перекладине 8, соединяющей стойки 6, закреплен стержень 9, который находится между двумя направляющими 10. Физический маятник снабжен импульсным
5 электромагнитным успокоителем, состоящим из расположенных поперек пути и прикрепленных к стержню 3 двух гибких пластин 11, между которыми с небольшими зазорами расположен импульсный
-. электромагнит 12, смонтированный на рамке 13, прикрепленной к базовой оси 5. Рамка также снабжена двумя импульсами успокоителями, каждый из которых состоит из одной гибкой полосы 14, расположенной вдоль пути и при5 крепленной к рамке 13, и импульсного электромагнита 15, прикрепленного к стойке 6. Груз 2 маятника соелинен гибкой связью с ротором сельсиндатчика 16, закрепленного на рамке
0 13 и электрически соединенного с
сельсином-приемником 17, расположенным -на пульте управления. .Ротор сельсина-приемника 17 гибкой связью динен с управляемой кареткой 18,
5 снабженной лвумя электроконтактами 19, между которыми расположен элект троконтакт 20 управляющей каретки 21 Последняя насажена на винте 22, кото рый находится в зацеплении с редутором 23, соединенным с механизмом 24 отвода возвышения. . Двухколесная тележка 7 шарнирно крепится к ферме машины при помощи двух тяг 25, В транспортное положение тележка с маятником поднимаетг ся пневмоцилиндром и крепится специальными крюками (не-шоказаны) « , Контрольный маятник, устанавливаемый сзади машины, от описанного выше отличается тем, что, его сельсин-датчик 16 соединен электрически с регистрирующим устройством 26, состоящим из сельсин-приемника 27, связанного гибкой .связью с кареткой 28, на которой консольнр закреплен электроконтакт 29, свободный конец которого опирается на пластину 30 с рядом расположенными контактами 31 разделенными диэлектрическими промежутками на интервалы, соответствующи 111,1У-и V степеням отклонения от нормального положения пути по уровню. Контакты 29 и 31 соединены с импульсным электросчетчиком 32, подсчи тывающим во скольких местах отступле по уровню достигают величины той или иной степени. Тележка 4 контроль ного уровня снабжена краскопультом (не показан). Устройство работает следующим образом. Во время зарядки машины НПО-3000 опускают из транспортного в рабочее положение тележку 7 с рабочим маятником, расположенным у электромагнитов путеподъемника, и тележку с конт рольным маятником, расположенным в конце машины. Затем включают в электросеть сельсины, импульсные электро магниты и электроконтакты. Во время движения машины Маятник устойчиво со храняет отвесное состояние,так как импульсный электромагнит 12,укреплен ный на рамке 13,непрерывно на доли секунды,то притягивает к себе,то от. пускает, гибкие пластины 11,которые прикреплены к стержню 3. Поэтому, если даже поперечный толчок тележки возникает в момент, когда магнит- 12 отпускает пластины 11, то отклонение маятника от вертикали будет незначительным, так как маятник снова притягивает к себе пластины. Но вместе с тем, если уровень рельсовых нитей будет изменяться, маятник будет постепенно менять свое положение относительно рамки 13, сохраняя при этом отвесное положение. Импульсные электромагниты 15 с гиб.кими пластинами 11 также препятствуют возникновению колебаний маятника совместно с рамкой 13 в плоскости продольной оси пути. При изменении взаимного расположеия рельсовых нитей по уровню базовая сь 5 остается параллельно линии,соеиняющей головки рельсовых нитей.При этом меняется расстояние между грузом маятника и сельсин-сдатчиком 16, закрепленным на рамке 13. Вследствие этого происходит поворот ротора сельсина на угол, пропорциональный величине изменения уровня рельсовых путей, В рабочем маятнике вместе с ротором датчика поворачивается и ротор сельсин-приемника 17, установленного на пульте управления. Поворот .ротора сельсина-приемника вызывает перемещение каретки 18 с двумя контактами 19, Между этими контактами .расположен контакт 20, укрепленный на каретке 21. При монтаже пульта управления устанавливают каретку 21 путем вращения винта 22 в положение, при котором ее указатель располагается по шкале против отсчета, соответствующего возвышению одной рельсовой нити над другой в сечении пути, над которым расположена тележка 7. После этого устанавливают каретку 21 так, чтобы контакты 19 распологались с обеих сторон контакта 20, и закрепляют каретку 18 к нити, соединяющей ее с ротором сельсина 17. Во время выправки прямых участков пути каретку 21 устанавливают так, чтобы, ее указатель установился против нуля или, если необходимо на всей прямой одну рельсовую нить поднять относите.льно другой на 5 .мм, то указатель следует установить против отсчета 5 мм, В процессе работы, если фактическое положение пути по уровню под тележкой отличается от величины, заданной кареткой 21, один из контактов 19 касается контакта 20, в результате чего происходит срабатывание механизма подъема одной из рельсовых нитей и фактическое положение по уровню становится равным заданному. На переходных кривых механизм 24 отвода возвышения через редуктор 23 поворачивает винт 22 так, чтобы на протяжении всей переходной, кривой каретка переместилась до величины заданного возвышения наружной рельсовой нити на круговой кривой. В этом положении она остается неподвижной, а на протяжении второй переходной кривой она опять возвращается в прежнее положение. На кривых участках пути вследстг вие поворота рычагов относительно продольной оси пути тележки 7 перемещаются относительно фермы машины не только в поперечном/ но и в продольном направлении. При этом стойки 6, шарнирно закрепленные на тележке, несколько наклоняются, так как стержень 9 расположен между двумя направляющими 10, То же происходит и при подъеме тележки 7 в транспортное положение. Маятник совместно с рамкой 13, закрепленной на базовой оси 5, остается все время в вертикальном положении, и гибкая связь груза 2 с сельсин-датчиком 16,. а также импульсный успокоитель (пластина 11 и электромагнит 12) не испытывают каких-либо изменений, что способствует повышению точности работы автоуровня. Контрольный маятник, установленный в конце машины, работает следующим образом, При монтаже этого маятника с регистрирующим устройством каретку 28 устанавливают в такое положение, при котором электроконтак 29 располагает на отсчете шкалы, соответствующем возвышению одной рельсовой нити над другой под тележкой 7., . В таком положении.при включенных сельсинах закрепляют каретку.к нити которая соединяет ее с роторсм сель сина 27, Пластина 30 с электроконтактами 31 располагается так, чтобы ее середина находиласв против отсче та, соответствующего проектной вели чине возвышения одной рельсовой нит над другой. В процессе движения машины элек троконтакт 29 показывает по шкале состояние по уровню под тележкой 7 контрольного маятника. Когда фактическое возвышение одной рельсовой нити над другой отличается от проек тного на величину, характеризуемую как III степень неисправности по уровню, контакт 29 касается первого от середины контакта 31 на пластине 30 и в счетчике 32; в ячейках, в которых подключаются неисправности III степени, имеющаяся цифра увеличивается на единицу. Если неисравность пути больше V степени и контакт 29 касается второго от середины контакта 31, в ячейках счетчика, в которых показывается количество мест и неисправностями IV степени, цифра увеличивается на единицу, а в ячейках 111 степени уменьшается на единицу. То же ,происходит и когда контакт 29 касается третьего 5т середины контакта 31, цифра в ячейке V степени увеличивается на единицу, а в ячейках IV степени уменьшается на единицу. Сигналы, поступающие при замыкании контактов 31, заблокированы jraK,4To они вызывают указанные и.зменения цифр IB счетчике 32 только в случае, когда контакт 29 движется от середины пластины 30 в одну или другую сторону. При движении контакта 29 от концов пластины 30 к ее середине на замыкание контактов 29 и 31 счетчик не реагирует. Внедрение предлаганиого изобретал ния позволит повысить точность работы по выправке пути, а также будет способствовать повышению скорости и безопасности движения поездов па отремонтированному участку пути.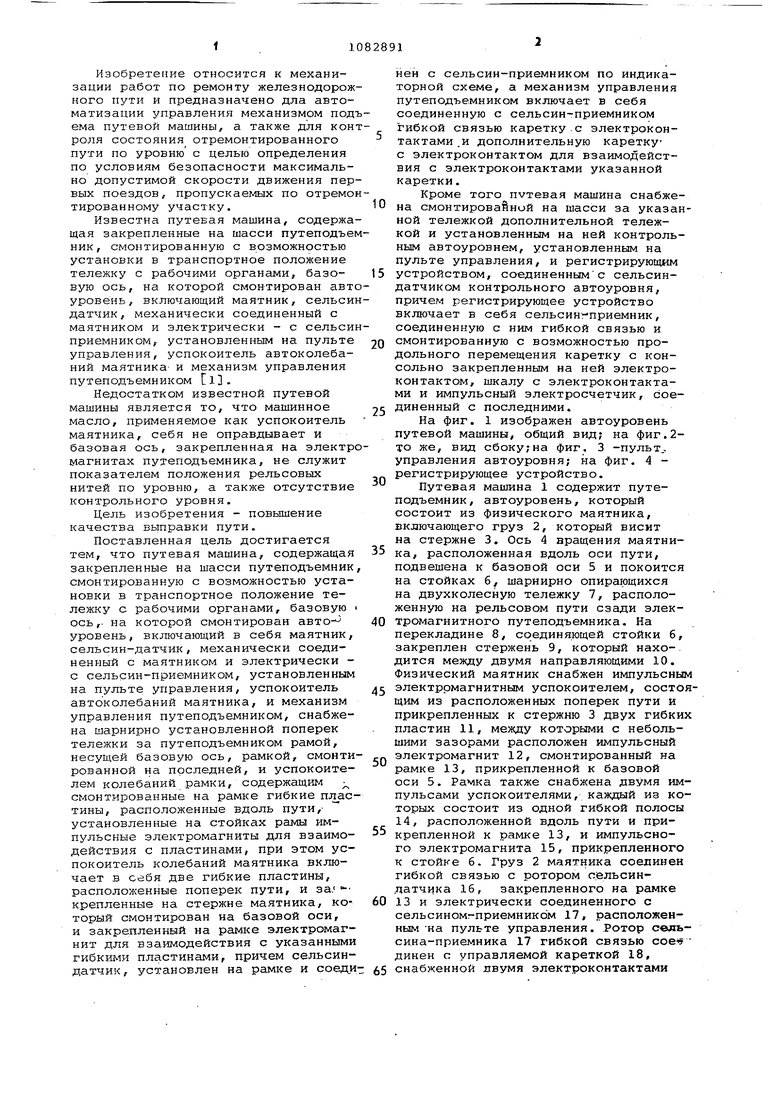
| название | год | авторы | номер документа |
|---|---|---|---|
| Контрольный стрелограф | 1983 |
|
SU1157155A1 |
| Устройство для рихтовки железнодорожного пути | 1978 |
|
SU779488A1 |
| Механизм измерения просадок рельсовых нитей для путевой машины | 1982 |
|
SU1063906A1 |
| Путевая машина | 1971 |
|
SU667622A1 |
| СПОСОБ ТУРОВСКОГО РИХТОВКИ КРИВЫХ УЧАСТКОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1997 |
|
RU2114235C1 |
| УСТРОЙСТВО ТУРОВСКОГО ДЛЯ РИХТОВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПО РАСЧЕТУ | 1997 |
|
RU2112104C1 |
| Устройство управления механизмом выправки путевой машины | 1978 |
|
SU773177A1 |
| Устройство управления выправкой железнодорожного пути | 1983 |
|
SU1116108A1 |
| СПОСОБ ТУРОВСКОГО КОНТРОЛЯ РАБОТЫ РИХТОВОЧНОГО УСТРОЙСТВА НА ПУТЕВОЙ МАШИНЕ | 1996 |
|
RU2114234C1 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
,1 .ПУТЕВАЯ МАШИНА, содержащая .закрепленные на шасси путеподъемник, смонтированную с возможностью уста,новки в транспортное положение тележку с рабочими органами, базовую ось, на которой смонтирован автоуровень, включающий в себя маятник, сельсиндатчик, механически соединенный с маятником и электрически - ,с сельсинприемником, установленным на пульте управления, успокоитель автоколебаний маятника и механизм управления путеподъемником, отличающаяся тем, что, с целью повышения качества выправки пути, она снабжена шарнирно установленной поперек тележки за путеподъемником рамой, несущей . ;. базовую ось, рамкой, смонтированной на последней, и успокоителем колебаний рамки, содержащим смонтированные на рамке гибкие пластины, расположенные вдоль пути, и установленные яа стойках рамы импульсные электромагниты для взаимодействия с . пластинами, при этом успокоитель колебаний маятника включает в себя две гибкие пластины, расположенные поперек пути и закрепленные на стержне маятника, который смонтиро|Ван на базовой оси, и закрепленный на рамке электромагнит для взаимодействия с указанными гибкими пластинами, причем сельсин-датчик установлен на рамке и соединен с сель- син-приемником по индикаторной схеме, а механизм управления путеподъемником включает себя соединенную с сельсин-приемником гибкой связью каретку с электроконтактами и дополнительную каретку с электрос контактом для взаимодействия с . S электроконтактами указанной каретки. (Л 2. Путевая машина по п. 1, отличающаяся тем, что она CZ снабжена смонтированной на шасси за указанной тележкой дополнительч ной тележкой и установленным на ней контрольным автоуровнем, установленным на пульте управления, и регистрирующим устройством, соединенным с сельсин-датчиком контрольного автоуровня, причем регист00 tsD рирующее устройство включает в себя сельсин-приемник, соединенную о ним гибкой связью и смонтированную 00 ;С возможностью продольного перемеср щения каретку с консольно закрепленным на ней электроконтактом, шкалу с электроконтактами и импульсный электросчетчик у сЪединенный с последними. . 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Иванов Е.Р | |||
| ТКАЦКИЙ СТАНОК | 1920 |
|
SU300A1 |
| Способ получения бензидиновых оснований | 1921 |
|
SU116A1 |
| : | |||
