(21)4044J67/24-24
(22)01,04.86
(46) 15о08о88. Бюл. № 30
(71)Каунасский политехнический инс-, титут им Антанаса Снечкуса
(72)М.Э.Акялис
(53)62-50 (088.8)
(56)Авторское свидетельство СССР № 981174, кл В 06 В 1/06, 1980.
.Авторское свидетельство СССР № 1287088, кл„ G 02 В 7/11, 1985.
(54)ВИБРАОДОННЫЙ ПРИВОД ВЕРТИКАЛЬНЫХ ШАГОВЫХ ПЕРЕМЕ ЦЕНИЙ
(57)Изобретение относится к области
управления шаговым перемещением и может быть использовано в оптико-механической промышленности для точной установки объекта в заданное положение. Целью изобретения является компенсация зависимости вертикальных шаговых перемещений от изменения веса объекта в направлении его перемещения. Указанная цель достигается управлением длительностью высокочастотно модулированных импульсов, воздействующих на вибрационный привод, по сигналам закрепленного на приводе акселерометра, 3 ил.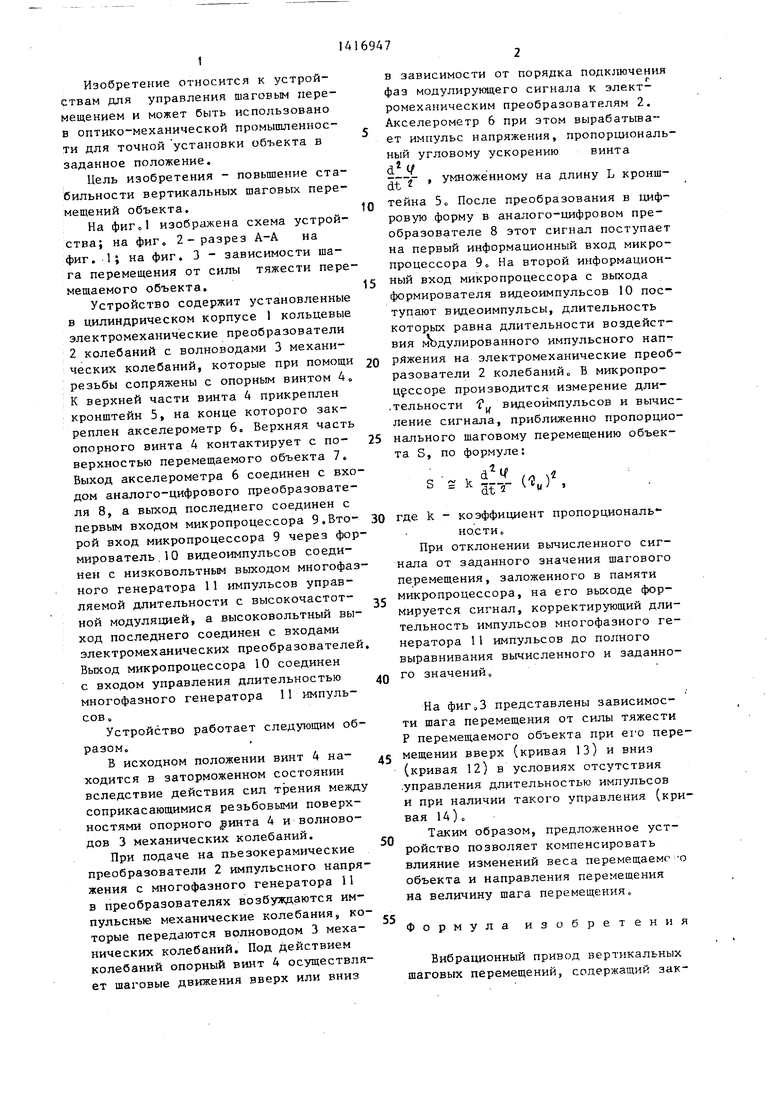
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вибротранспортирования штучных длинномерных изделий | 1988 |
|
SU1511185A2 |
| СПОСОБ И УСТРОЙСТВО РАДИОВОЛНОВОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 1998 |
|
RU2145441C1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| Ультразвуковой дефектоскоп для иммерсионного контроля | 1990 |
|
SU1748048A1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| ИМПУЛЬСНЫЙ СВЕРХШИРОКОПОЛОСНЫЙ ДАТЧИК ДИСТАНЦИОННОГО МОНИТОРИНГА ДЫХАНИЯ И СЕРДЦЕБИЕНИЯ | 2008 |
|
RU2392852C2 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| МАГНИТОСТРИКЦИОННЫЙ КОДОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2297506C2 |

4
Ь5
СО
|
-J
Изобретение относится к устройствам для управления шаговым перемещением и может быть использовано в оптико-механической промышленности для точной установки объекта в заданное положение.
Цель изобретения - повьшение стабильности вертикальных шаговых перемещений объекта.
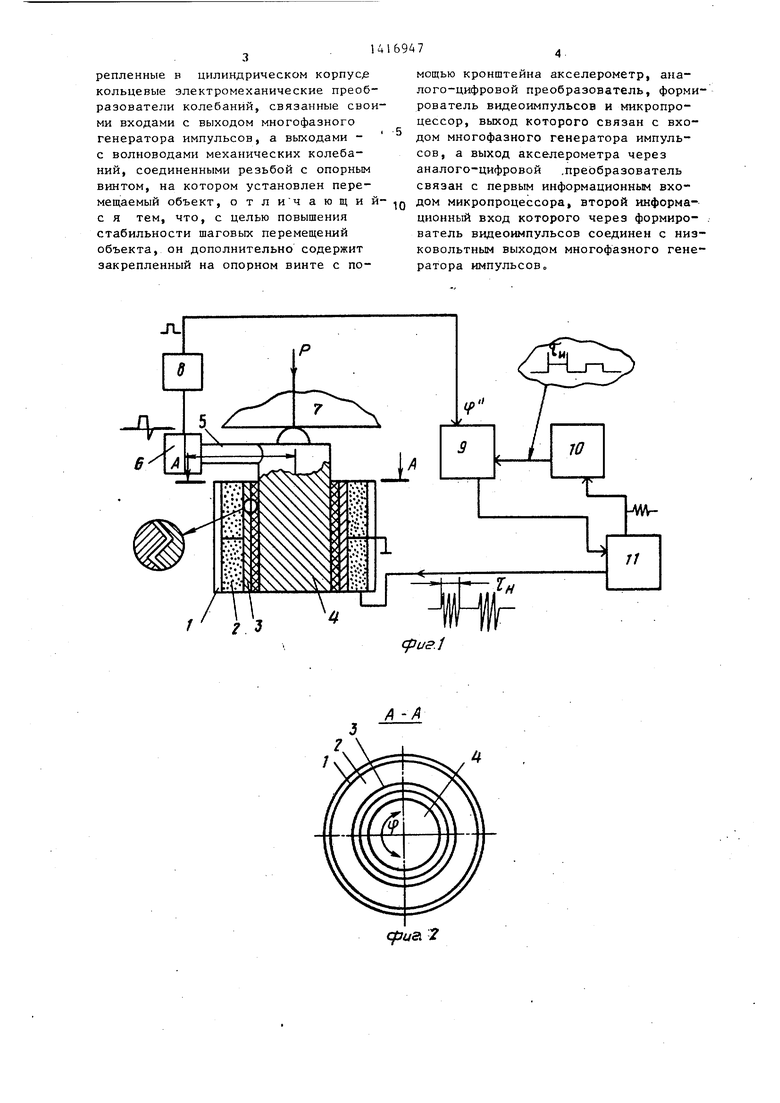
На фиГо изображена схема устройства; на фиг. 2-разрез А-А на фиг. 1; на фиг. 3 - зависимости шага перемещения от силы тяжести перемещаемого объекта.
Устройство содержит установленные в цилиндрическом корпусе 1 кольцевые электромеханические преобразователи 2 колебаний с волноводами 3 механических колебаний, которые при помощи резьбы сопряжены с опорным винтом 4„ К верхней части винта 4 прикреплен кронштейн 5, на конце которого закреплен акселерометр 6. Верхняя часть опорного винта 4 контактирует с поверхностью перемещаемого объекта 7. Выход акселерометра 6 соединен с входом аналого-цифрового преобразователя 8, а выход последнего соединен с первым входом микропроцессора 9.Второй вход микропроцессора 9 через формирователь , 10 видеоимпульсов соединен с низковольтным выходом многофазного генератора 11 импульсов управляемой длительности с высокочастотной модуляцией, а высоковольтный выход последнего соединен с входами электромеханических преобразователей Выход микропроцессора 10 соединен с входом управления длительностью многофазного генератора 11 импульсов.
Устройство работает следующим образом.
В исходном положении винт 4 находится в заторможенном состоянии вследствие действия сил трения между соприкасающимися резьбовыми поверхностями опорного инта 4 и волноводов 3 механических колебаний.
При подаче на пьезокерамические преобразователи 2 импульсного напряжения с многофазного генератора 11 в преобразователях возбуждаются импульсные механические колебания, которые передаются волноводом 3 механических колебаний. Под действием колебаний опорный винт 4 осуществляет шаговые движения вверх или вниз
0
в зависимости от порядка подключения фаз модулирующего сигнала к электромеханическим преобразователям 2. Акселерометр 6 при этом вырабатывает импульс напряжения, пропорциональвинта
ныи угловому ускорению
f t умноженному на длину L кронштеина 5с После преобразования в пяф- ровую форму в аналого-цифровом преобразователе 8 этот сигнал поступает на первый информационный вход микропроцессора 9 На второй информацион5 ный вход микропроцессора с выхода формирователя видеоимпульсов 10 поступают видеоимпульсы, длительность которых равна длительности воздействия мЬдулированного импульсного нап0 ряжения на электромеханические преобразователи 2 колебаний В микропро- ц ссоре производится измерение дли- .тельности видеоимпульсов и вычисление сигнала, приближенно пропорцио5 напьного шаговому перемещению объекта S, по формуле:
Ч - k сг dt
0 где k - коэффициент пропорциональ ности
При отклонении вычисленного сигнала от заданного значения шагового перемещения, заложенного в памяти
с микропроцессора, на его выходе формируется сигнал, корректирующий длительность импульсов многофазного генератора 11 импульсов до полного выравнивания вычисленного и заданнод ГО значений.
На представлены зависимости шага перемещения от силы тяжести Р перемещаемого объекта при его пере- 5 мещении вверх (кривая 13) и вниз (кривая 12) в условиях отсутствия .управления длительностью импульсов и при наличии такого управления (кривая 14) о
Таким образом, предложенное устройство позволяет компенсировать влияние изменений веса перемещаемо о объекта и направления перемещения на величину шага перемещения о
55
Формула изобретения
Вибрационный привод верт -{кальных шаговых перемещений, содержащий закрепленные в цилиндрическом корпус;г кольцевые электромеханические преобразователи колебаний, связанные своими входами с выходом многофазного генератора импульсов, а выходами - с волноводами механических колебаний, соединенными резьбой с опорным винтом, на котором установлен перемещаемый объект, отли чающий- с я тем, что, с целью повышения стабильности шаговых перемещений объекта, он дополнительно содержит закрепленный на опорном винте с поJL
/ ,
мощью кронштейна акселерометр, аналого-цифровой преобразователь, формирователь видеоимпульсов и микропроцессор, выход которого связан с входом многофазного генератора импульсов
, а выход акселерометра через
аналого-цифровой .преобразователь связан с первым информационным вхо- дом микропроцессора, второй информационный вход которого через формирователь видеоимпульсов соединен с низковольтным выходом многофазного генератора импульсов о
сриг.1
сриаУ
(иг.З
