Р
СО 4
Изобретение относится к нагружа-. гопщм устройствам тренажеров и может быть использовано для тренировки спортсменов, операторов летательных аппаратов в наземных и полетных условиях, а также в медицинской практике для создания нагрузок на руки и ноги человека,
; Цель изобретения - повышение эф фективности использования путем обеспечения различных режимов тренировки.
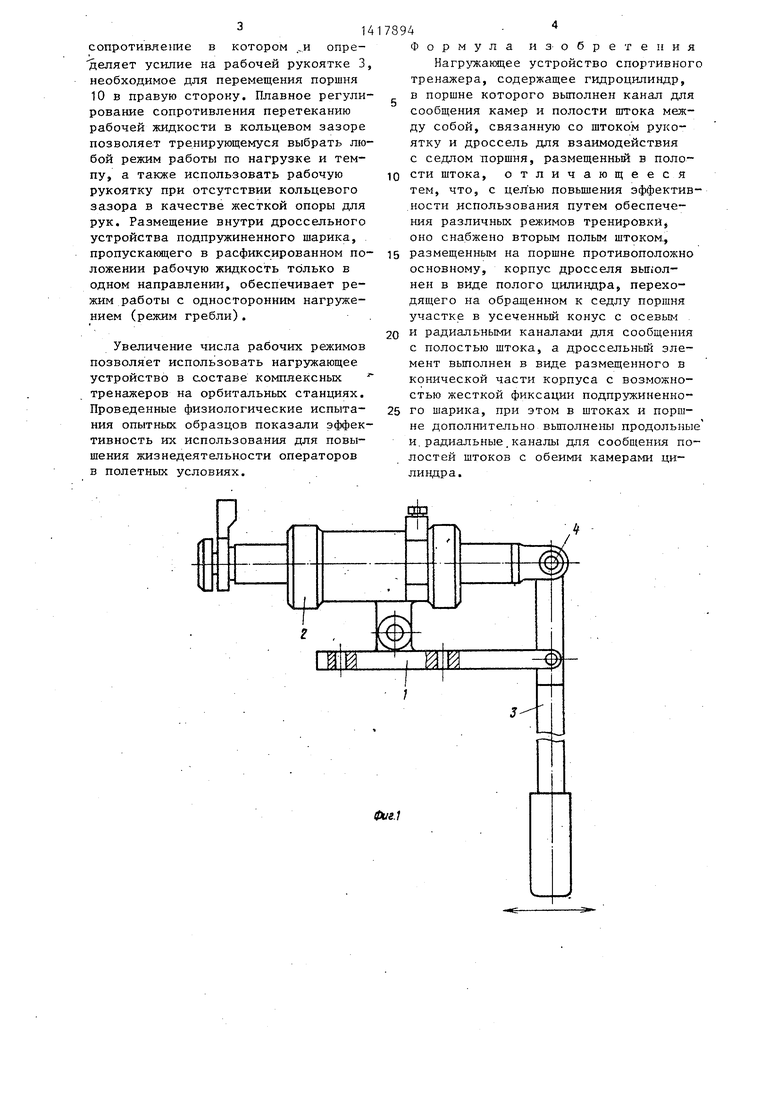
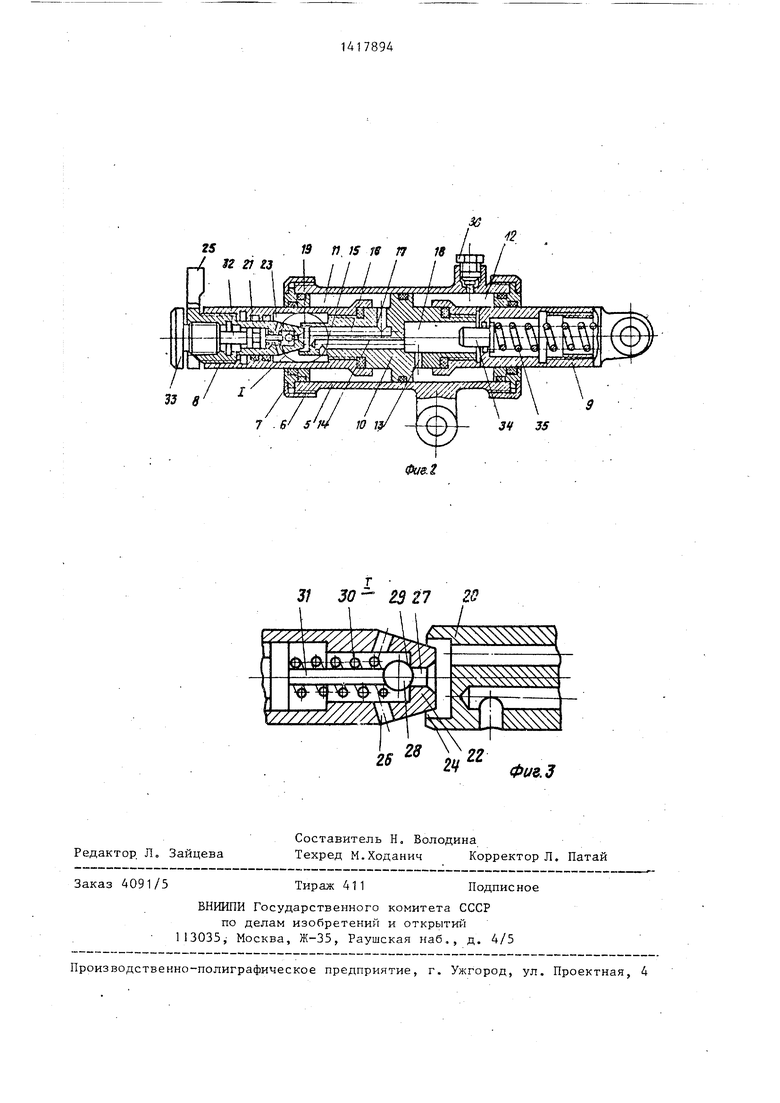
На фиг, 1 изображено,устройство, общий вид; на фиг. 2 - же, разрез на фиг. 3 узел I-на фиг. 2.
: Нагружающее устройство состоит из .основания 15 к которому шарнирно кре яится гидроцилиндр 2 двойного действи и рабочая рукоятка 3, Соединение раб :чей рукоятки со штоком тпоршня гидро- :циливдра производится в шарнире 4, Гидроцилиндр состоит из корпуса S, ;На котором навернуты накидные гайки 6,-фиксирующие крышки 7, через кото- ;рые проходят штоки 8 и 9, соединенны с поршнем 10, разделяющим внутреннюю полость гидроцштиндра на две камеры : 11 и 12, Внутри поршня проходят ка налы 13-17, соединяющие камеры, и имеются полости 18 и 19 и седло 20. Внутрь ..штока 8 встроено дроссельное устройство 21, на конце которого имеется усеченньш конус 22, размещенный в полости 23 и образующий регули руемьй кольцевой зазор 24 с седлом 20 в поршне. Регулирование зазора производится вращением рукоятки 25. Усеченньй конус имеет радиальные каналы 26 и осевой канал 27, запирае- мый шариком 28 в седле 29, Подлсатие шарика к седлу осуществляется пружиной 30, одетой на стержень 31 запорного винта 32, ввернутого в дроссельное устройство. Положение стержня относительно щарика регулируется вра щение м рукоятки 33. Внутри штока 9 размещен компенсатор 34 теплового расширения рабочей жидкости, поджимаемый пружиной 35. Заправка гидро- цилиндра рабочей жидкостью производится через щтуцер 36.
Нагружающее устройство работает следующим образом.
Для работы в режиме нагружения в обоих направлениях рукояткой 33 заворачивают запорный винт 32 до тех пор, пока стержень 31 не упрется в шарик 28, зафиксировав его в седле 29
0
0
г
0
5
5 5 0 5 0
5
Тем самым запирается осевой канал 27 усеченного конуса 22 в дроссельном устройстве 21. При движении рабочей рукоятки 3 влево поршень 10,. двигаясь в правую сторону, вы.тесняет рабочую жидкость из камеры 12, которая по каналу 13 подается в полость 18, откуда через каналы 14 и 15 поступает в полость 23„ Преодолевая сопротивление в кольцевом зазоре 24, рабочая жидкость проходит в полость 19 поршня, а затем по каналам 16 и 17 попадает в камеру 11. Аналогичньй путь продельшает рабочая жидкость, перетекая из камеры 11 в камеру 12, при перемещении поршня в левую сторону, что соответствует-движению рабочей рукоятки 3 в правую сторону. Усилие, прикладьшаемое к рабочей рукоятке, зависит от величины кольцевого зазора 24. При завинчивании дроссельного устройства- 21 кольцевой зазор уменьшается, и усили е на рабочей рукоятке возрастает, при вы- винчива1-1ии кольцевой зазор увеличивается и усилие на рабочей.рукоятке уменьшается. При работе в режиме нагружения в одном направлении запорный винт 32 отворачивают рукояткой 33 э и стержень 31 освобождает шарик
28. При перемещении рабочей рукоятки 3 в правую сторону поршень 10 движется в левую сторону, вытесняя рабочую жидкость из камеры 11 через каналы 16 и 17 в полость 19 Так как сопротивление перетекания жидкости в кольцевом зазоре 24 гораздо больше, чем усилие пружины 30, поджимающей шарик 28 к седлу 29, то давлением рабочей жидкости шарик 28 отрьшает. ся от седла 29, и жидкость по каналам
27и 26 поступает в полость 23, а затем по каналам 15 и 14 проходит в полость 18, из которой по каналу 13 перетекает в камеру 12. Сопротивление перетеканию рабочей жидкости минимально и определяется сопротивлением трак.та. При перемещении рабочей рукоятки 3 в левую сторону поршень 10 движется в правую сторону и давление рабочей жидкости, поступающей из камеры 12 по каналам 13-15 в полость 23 через каналы 26, воздействует на шарик 26 и, суммируясь с усилием пружины 30, фиксирует шарик
28в седле 29, перекрьшая канал 27. Перетекание жидкости проходит через кольцевой зазор 24,
Фиг.1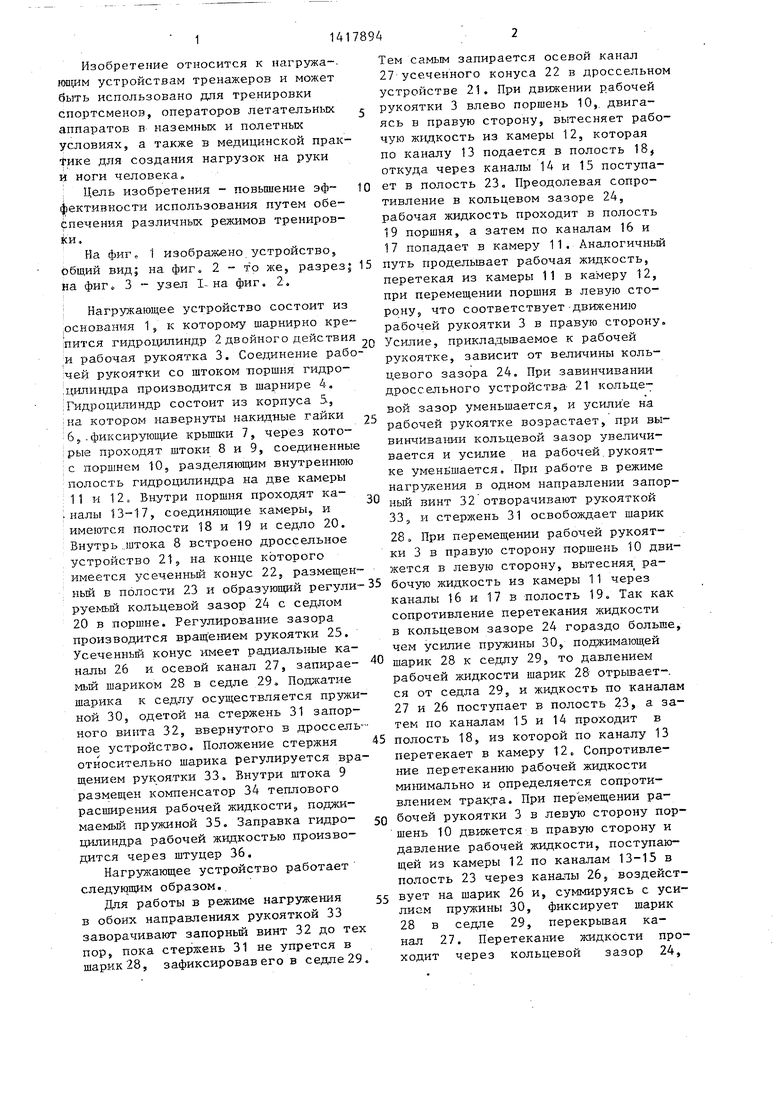
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный дождевальный аппарат | 1982 |
|
SU1159516A1 |
| ПАКЕР-ПРОБКА И МОНТАЖНЫЙ ИНСТРУМЕНТ ДЛЯ ПОСАДКИ ЕГО В СКВАЖИНЕ (ВАРИАНТЫ) | 2013 |
|
RU2537713C2 |
| Автоматический стояночный тормоз | 1989 |
|
SU1664623A1 |
| Гидравлический привод рабочих органов | 1973 |
|
SU475970A1 |
| Гидропривод | 1973 |
|
SU561814A1 |
| Гидравлический опрокидывающий механизм кабины грузового автомобиля | 1988 |
|
SU1530521A1 |
| УНИВЕРСАЛЬНЫЙ РЕГУЛИРУЮЩИЙ КЛАПАН | 1990 |
|
RU2054137C1 |
| Нагружающее устройство тренажера | 1990 |
|
SU1811875A1 |
| Импульсный дождевальный аппарат | 1984 |
|
SU1271455A1 |
| КЛАПАН ЗАПОРНЫЙ ЭЛЕКТРОМАГНИТНЫЙ | 2010 |
|
RU2477408C2 |
Изобретение позволяет повысить эффективность использования устройства путем обеспечения различных режимов тренировки. Устройство включает гидроцилиндр двойного действия с двумя штоками, с одним из которых связана рукоятка. Штоки.вьшолнены полыми с радиальными, каналами для сообщения с камерами цилиндра. В поршне имеются продольные и .радиальные каналы для сообщения полостей штоков с камерами. В одном из штоков размещено дроссельное устройство, корпус которого выполнен в виде полого цилиндра с коническим участком на обращенной к седлу поршня конце. В коническом участке сделаны осевое и радиальные отверстия для сообщения с полостью штока. В корпусе размещен подпружиненный щарик с возможностью жесткой фиксации его. Устройство позволяет получить одинаковую нагрузку при прямом и обратном ходе поршня. Возможно регулирование нагрузки за счет изменения кольцевого зазора между усеченным конусом дросселя и седлом поршня. При жесткой фиксации шарика обеспечивается режим одинаковой нагрузки в обоих направле- с ниях, при плавающем положении шарика - режим гребли.При посадке конуса дросселя в седло поршня и жестком положении шарика рукоятка неподвижна и может использоваться как опора для выполнения физических упражнений. 3 ил.
31 30 гЭ27 20
Ю 13/ j 34 35
26
Фиъ.З
| Нагрузочный механизм устройства для тренировки гребцов | 1984 |
|
SU1189463A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
